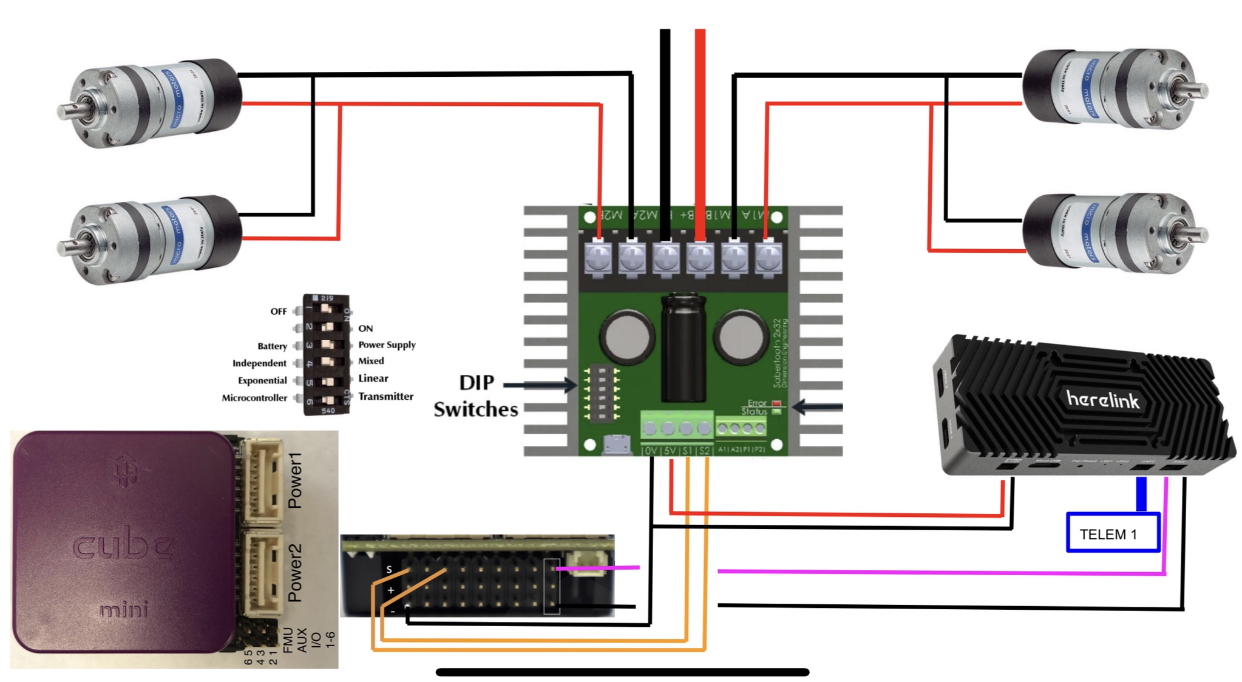
How are you looking to set them up? I use the Sabertooth 2x32 With the motors wired in parallel on LH and RH side for skid steering.
This is my basic setup, the sabertooth is great controller with tons of options but not the cheapest.