Thank you Randy, that is a very valuable lesson regarding the copying of the full parameter tree, and has possibly been the cause of many of my woes over the past 6 years.
I will be giving these changes a try when I get back from my mapping trip week after next, thank you once again.
An autotune feature will be a big winner for sure, especially for larger craft like mine.
This was the other AIMy (Skinny)* an hour earlier with the identical setup and hardware. She uses our old parameters that we treasure like gold. Fat is on the latest firmware and is using the parameters we came to in this thread. See image below.
Skinny Files:
*These two AIMy’s are named Fat and Skinny as the only difference is the thickness of the hull where one is heavy and the other light.
Need a log to fully explore it. Looks like you may have lost GPS for a while and the EKF position estimate drifted, but can’t say for sure without the data.
It’s also possible that AP is correct and that the external GPS (perhaps attached to the sonar?) is incorrect. We should be able to look at the GPS and GPA messages in the onboard logs to see how accurate the GPS thinks it is.
… I think it will come down to which of the two GPSs is correct. It’s less likely to be an AP software issue.
If I can go off on a tangent for a moment, we are thinking about starting a project to create “drone management” software to make it easier to keep track of vehicles, handle their log files, update firmware etc. I was thinking of using this on my boat to allow combining the autopilot’s position and attitude estimates with the sonar data. it would require a companion computer and that might mean we need to write some sonar drivers on the companion computer because routing a side scan sonar data through the autopilot is a bit much for it to handle (I think).
I’m going to venture a guess that your sonar GPS accuracy suffered on this mission.
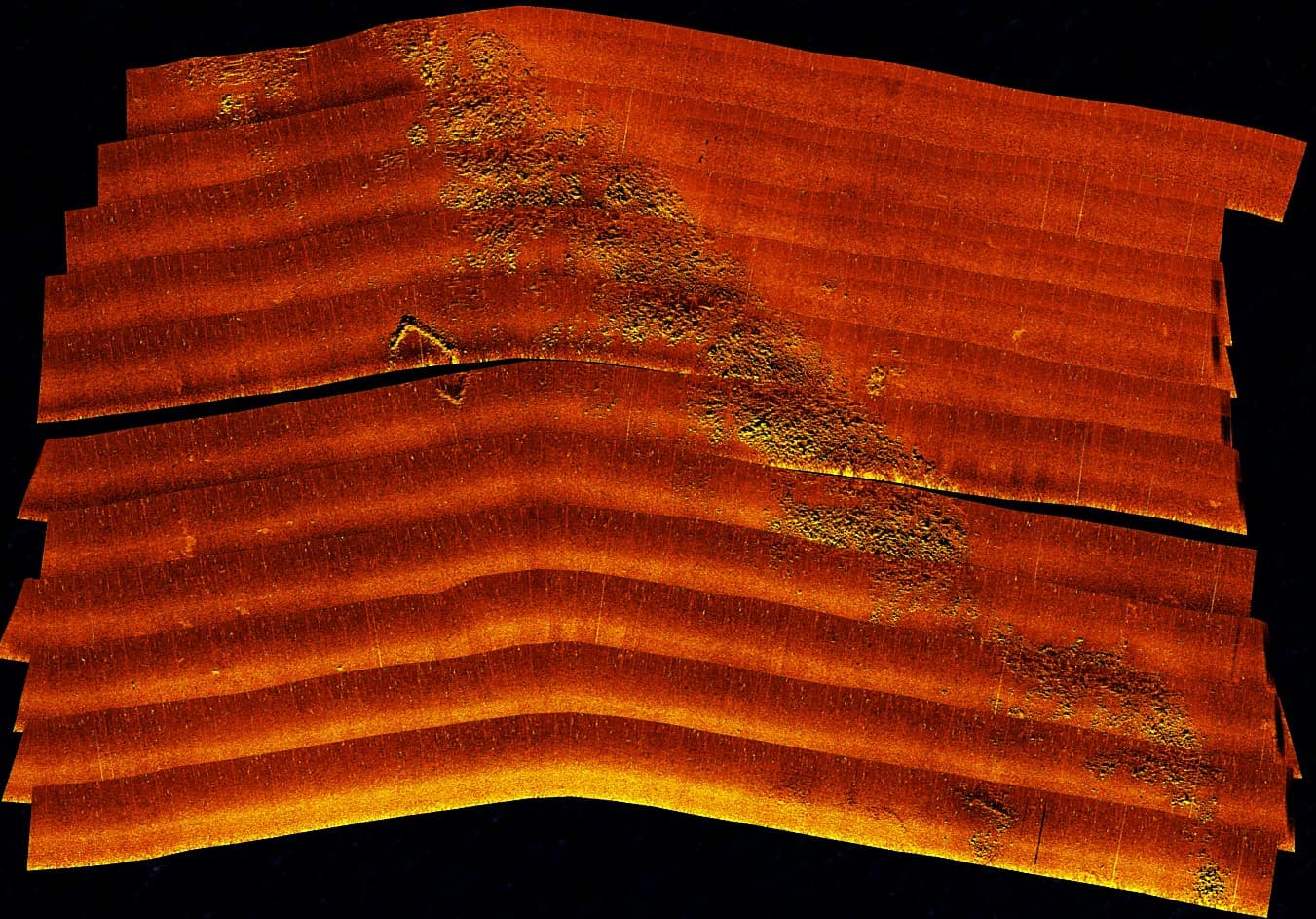
The log doesn’t show anything too glaring from what I can see, though the position accuracy and satellite count steadily declined throughout, so maybe the sonar GPS started to lose its way as GPS “conditions” worsened.
The log still shows reasonable horizontal accuracy and EKF innovations even as the satellite count dropped to 6 from 10-12 initially. If the sonar antenna was seeing 6 or fewer satellites at the same time, it’s entirely possible that its accuracy suffered worse than the autopilot.
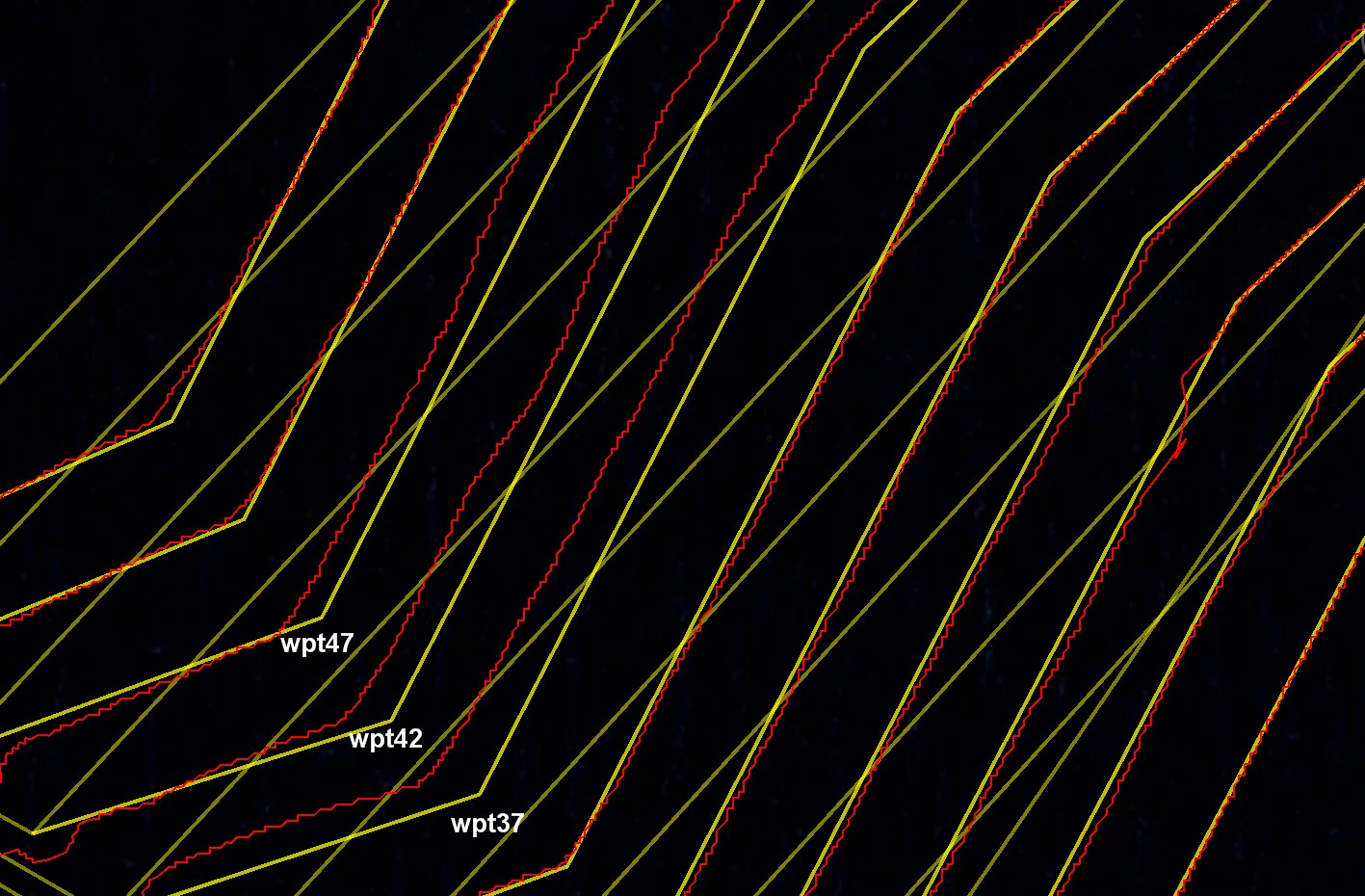
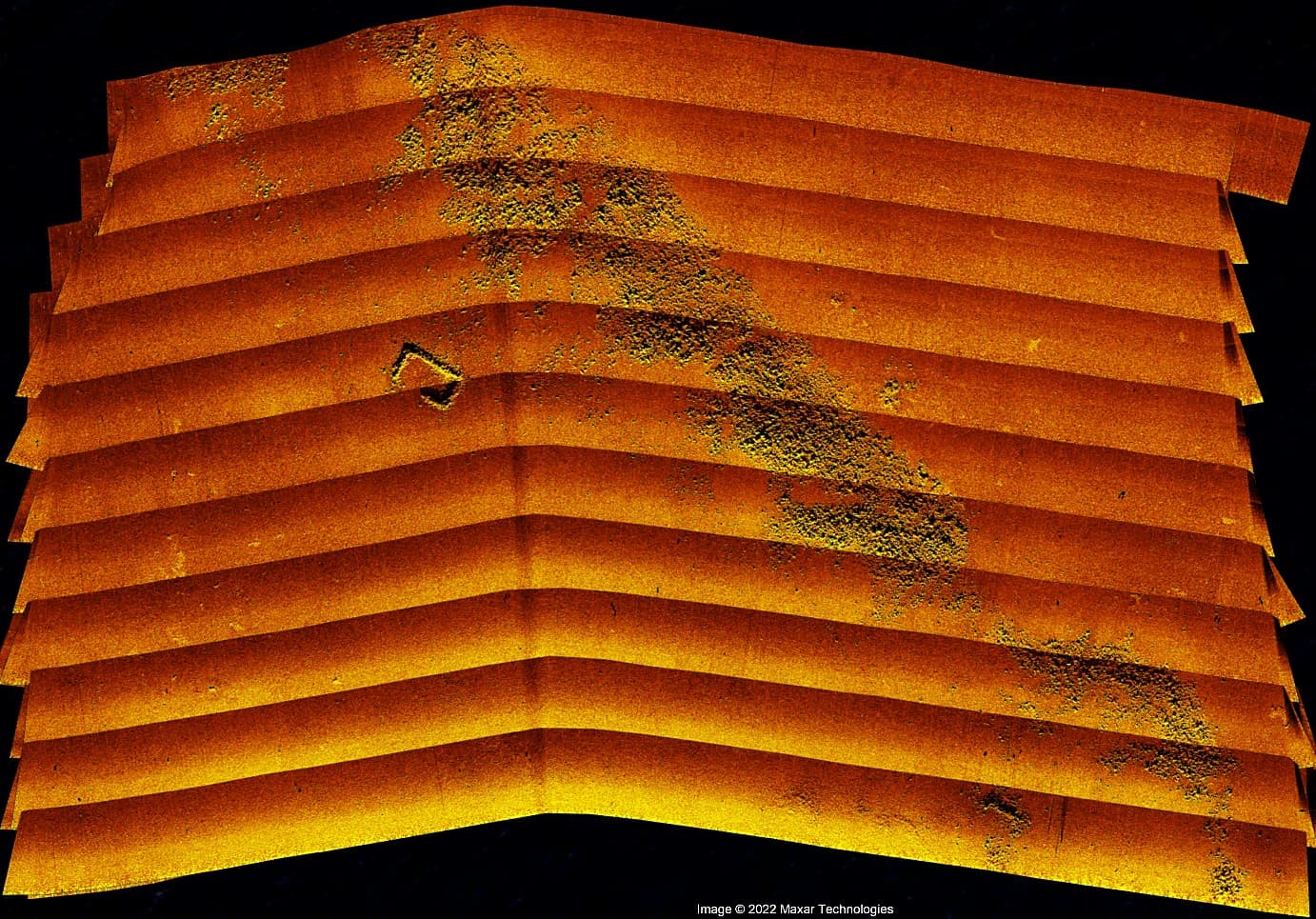
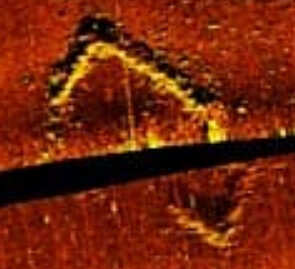
If you mentally “stitch” this part of the image together, it kind of makes sense that the image is offset from reality rather than the boat’s path having wandered off course. Does that make sense?
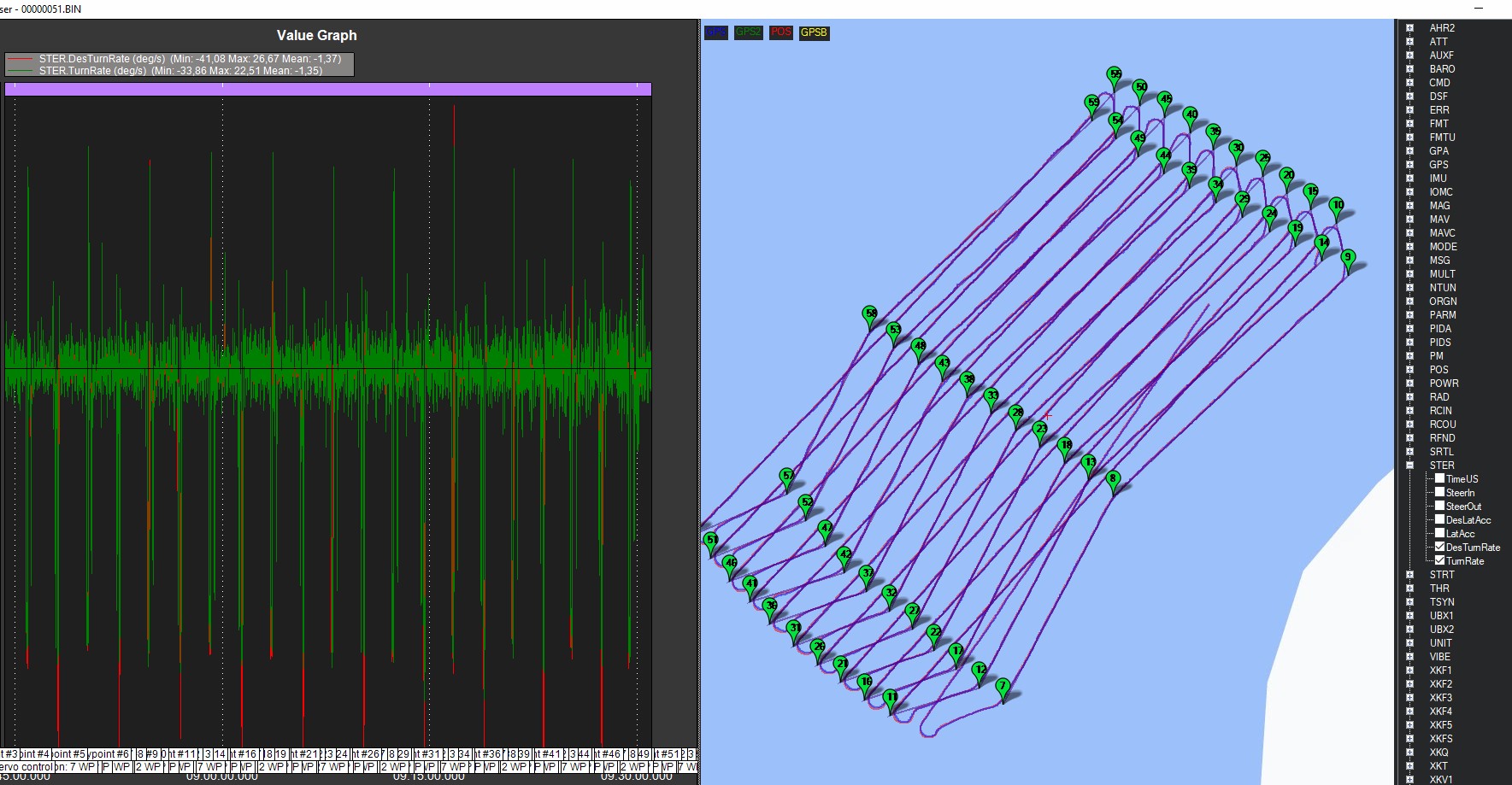
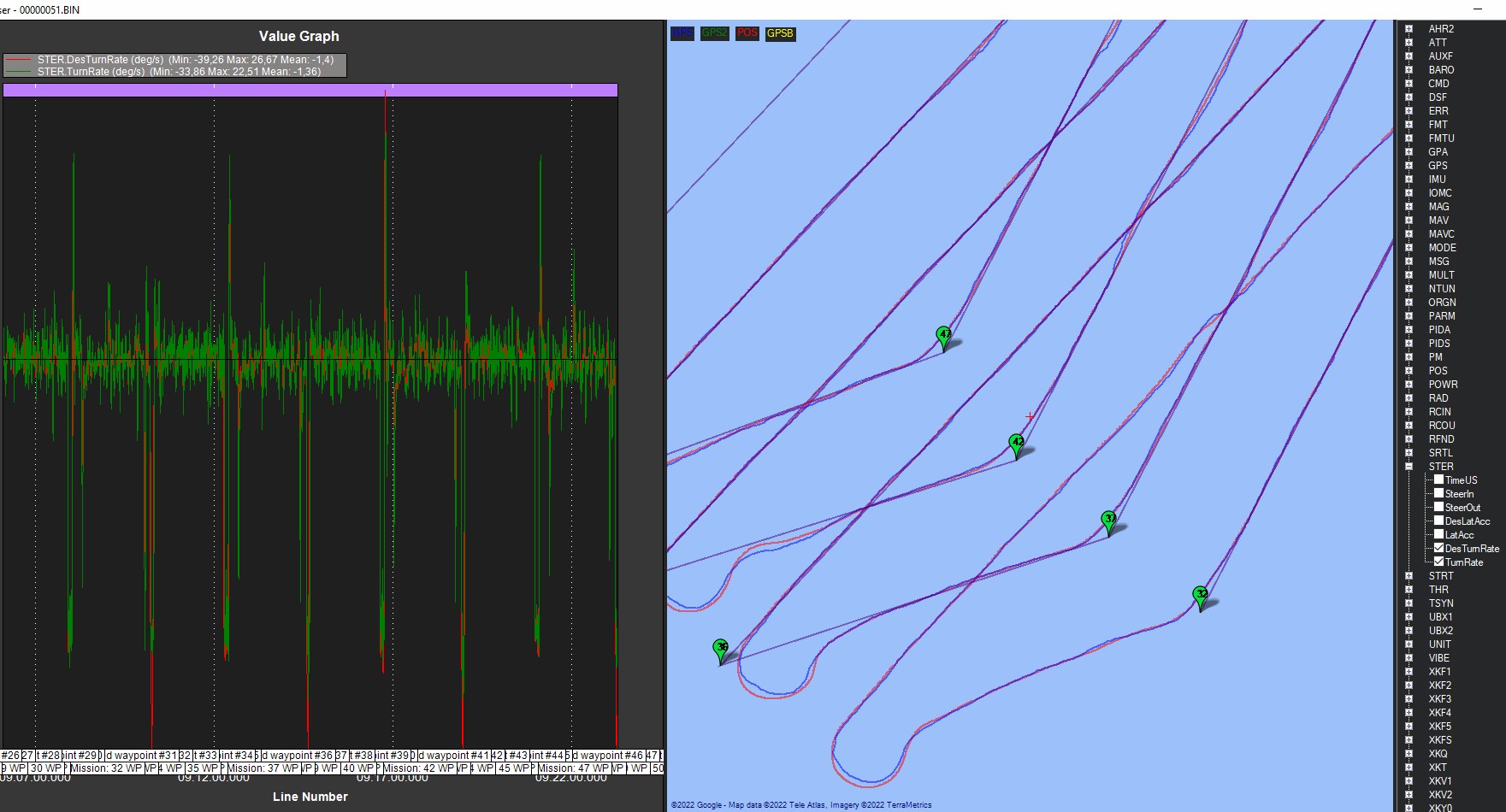
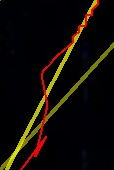
Sudden jumps in position like this are also somewhat telling that the GPS positional accuracy was suffering:
If the sonar GPS will accept RTCM3 from the autopilot GPS (assuming it’s capable as well), the two would likely align better throughout.
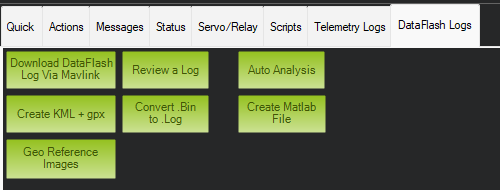
Yep. It’s right there in MP where you review the log.
The output is a little funky, with a 3D path and altitude displayed in a way that doesn’t make sense. But there’s an option in Google Earth somewhere to flatten the trace (I can’t remember what it’s called).
Oh ok, I was trying to export from the log browser map, thank you.
The GPS on the sonar definitely suffered, I wish I could work out how to get the GPS from the autopilot into the Humminbird through the NMEA0183.
Yes, it’s this part that is slightly challenging… blending the NMEA output from the autopilot into the sonar’s output file. You said above that you pass the side scan sonar NMEA data into the autopilot so that you can see it in real-time on the ground station? … and I guess on the sonar itself it also records a NMEA file and this is what you’re later using as the input to the mapping software?