To how many decimal places did you round them down/up?
I had two values that had about 8 decimal places.
The long decimal values are not a problem, per se. I noticed some minor steering overshoots in the log and rounded to 2-3 decimal places as a means of tightening the tune slightly.
It’s not necessarily best practice to simply round the values because they are visually displeasing.
1 Like
I don’t find them displeasing at all. It crossed my mind that these values may increase the processing power required. If not then I am more than happy to leave alone until I have a better understanding of what rounding them up or down would do.
No. Additional displayed digits have no bearing on CPU or memory load. They are stored as 16 or 32 bit values, and the same number of bits/bytes are processed regardless of how the numbers are presented in human readable form.
1 Like
Thank you for the explanation Yuri. Unfortunately I am none the wiser!
I will leave well alone and trust the Quick Tune process for now.
One day I may understand software…but I doubt it.
Thank you Randy, I will give this a try
1 Like
Hello @rmackay9, I have a vector thrust jetboard that will be running at 30 knots, the board itself is quite big around 1.5m length, and weigh about 30-40kg. It is using with a cube orange, would it be a good idea to test it with QuikTune?
Hi @zhe0201,
It could be. It really depends on how well you’ve managed to tune it yourself. If you haven’t tuned it at all then the QuikTune will likely improve it. If you have a log I’m happy to have a look at it.
thanks! I am going out to do my first tuning tomorrow. Will share the log once I get it.
2 Likes
Thanks Randy and team, i upgraded to 4.4 beta11 and ran the auto-tune script.
I haven’t downloaded the log or looked in too far but the lines its now mowing are excellent. Cross track error is well within 50mm and mostly 10-20mm. The tune messed up the speed pids - (bucking bronko) so needed a quick manual tune.
Video of mower driving round and round here.

4 Likes
Great, thanks very much for the feedback. Nice location and nice mower!
1 Like
The Tune does not complete on my craft
Hi @John_Easton,
I think the issue is that the boat probably cannot achieve a 10deg/sec turn rate. It should have displayed a warning on the ground station if I’m right.
1 Like
Yes Randy, she is a semi-submersible with a lot of ballast.
As seen here in this video - https://www.facebook.com/reel/311835715145595
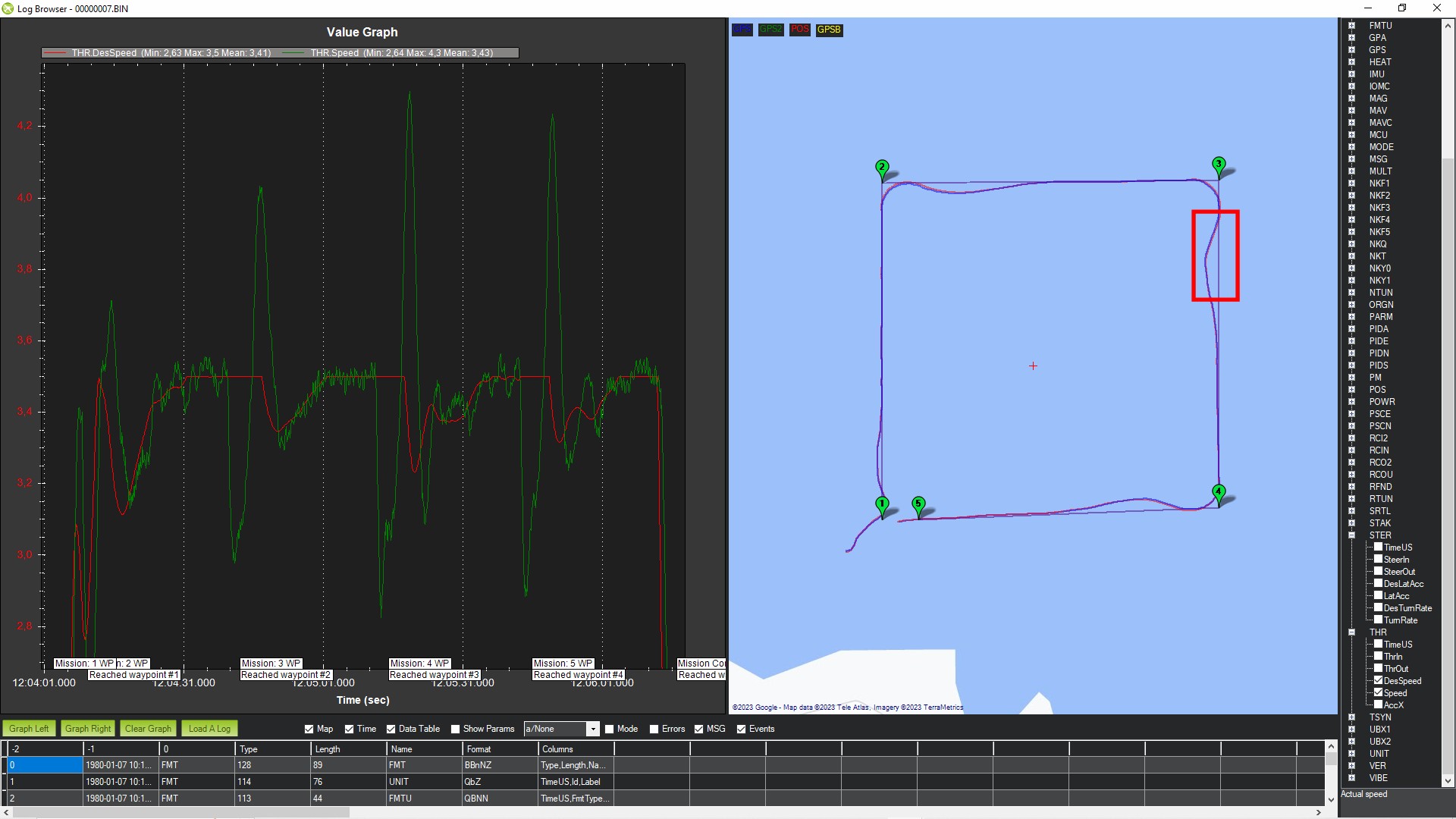
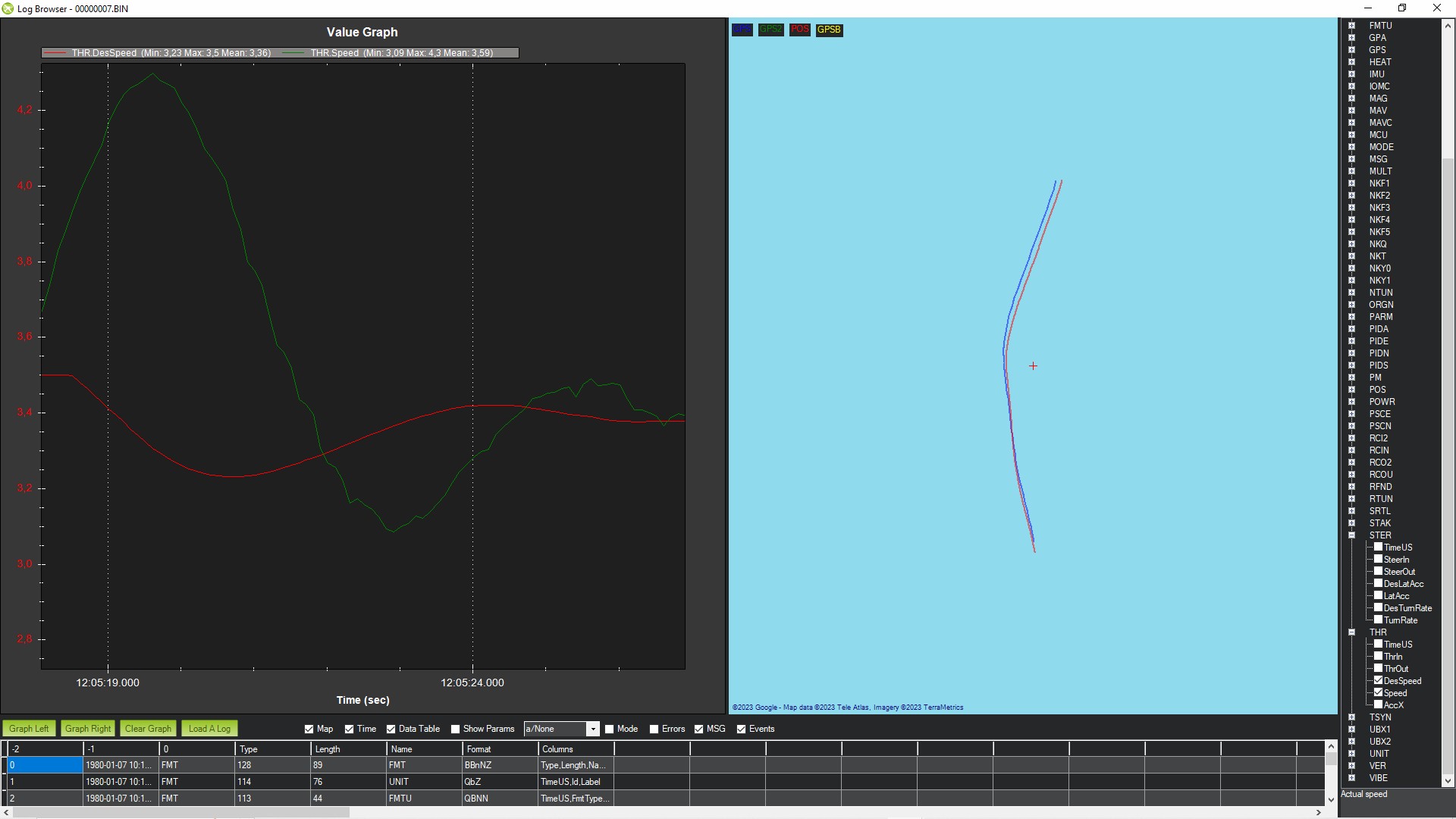
I am quite happy with her navigation except for the over throttle in the turn resulting in a major oversteer.
If I can get a handle on this section of the throttle I believe she will be perfect.
1 Like
Hi @John_Easton,
OK, so what we’ve got there is a major disturbance in the actual speed (caused by the vehicle turning) which leads to an oscillation in the speed controller.
I think the best we can do is reduce the speed controller gains and its error filter value. So we should reduce these parameter values:
- ATC_SPEED_P
- ATC_SPEED_I
- ATC_SPEED_FLTE
2 Likes
I attempted a tune with my Traxxis Xmaxx yesterday. Unfortunately circle mode was very unstable, with the vehicle “wandering off” frequently:
(5m circle, 2m/s speed. Default ATC_* params. Rover 4.4.0)
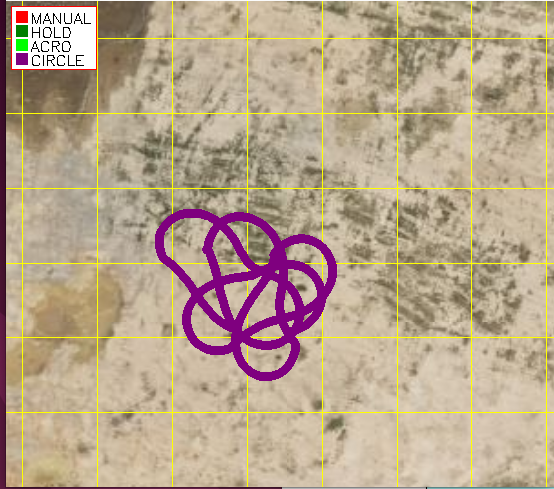
Bringing the speed down to 1m/s made circle mode happy again, but was too slow for Quiktune to do it’s thing.
I’m thinking maybe the default ATC_STR_RAT_FF is too low? Will test this theory next week.
This is probably more an issue for circle mode, rather than Quiktune.
EDIT:
Linked issue here: Rover: Circle mode instabilities · Issue #25825 · ArduPilot/ardupilot · GitHub
I had the same thing happen to me once, and then I analyzed it, and I had an obstacle avoidance radar that was avoiding obstacles all the time
An update to this:
I increased ATC_STR_RAT_FF from the default of 0.2, to 0.3, then 0.4 - until I got stable circles.
Once the circles were stable, I ran quiktune at 2m/s and got some really nice results. I then re-ran quiktune at 4m/s, to get a tune optimised for a typical cruise speed.
I ran the vehicle in a AUTO mission at 2, 3, 4 and 5m/s with nice tracking in all cases. I did need to increase PSC_VEL_P a little, but otherwise fine.
So, for those running higher-performance vehicles - the above is a good methodology for tuning.
2 Likes
can you please share the values you get