Initial results very promising!
I reset PSC params to defaults prior to this session.
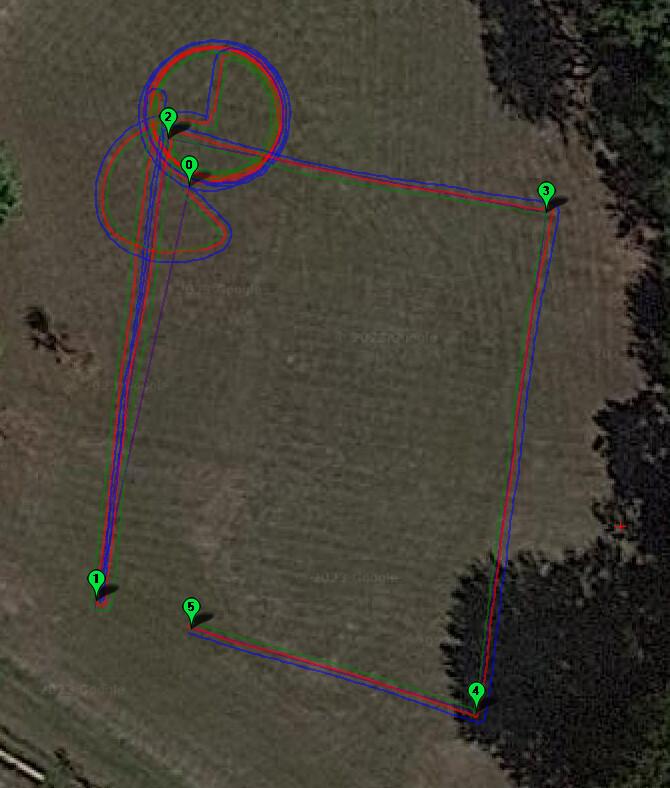
That first half circle had some big bumps, so I offset a little before initiating QuikTune. It completed quickly and with little issue, though I think my circle radius might have been on the ragged edge of too large (a couple of warnings to “increase steering”).
First auto mission looked pretty solid. Brief log review shows that STER.DesTurnRate may be overshooting a little, but the data is noisy (likely a combination of rough terrain and machine vibration).
I’ll run a longer mission as soon as I finish typing here and report any further findings and/or manual refinements of the tuning.
Log file (anon) linked here. Can provide .bin privately upon request.
(and yes, I still have arming checks disabled…I really ought to employ a solution to that…)
UPDATE (while the longer mission runs):
Based on my log review and observation during the mission, I made some very small tweaks to the autotuned values (mostly just rounding them slightly up or down from the long decimal values) and may have gotten slightly better results. I’m not sure anything I did there was meaningful enough to warrant changing the QuikTune script. Noticed I had some lingering D-term values as well, so zeroed those, since it appears QuikTune doesn’t touch them anymore (comment at the top of the script probably needs an update).
Also reset TURN_MAX_G and WP_RADIUS to defaults, which smoothed S-Curves from a more aggressive setting I had tried previously.
I’ve noticed that both the L1 controller and PSC controller seem to misbehave just a little bit after a scripted speed change. The vehicle always wanders a little before correcting back to track after a speed change (particularly when slowing). That behavior is much improved in beta11, but I wonder if that might be a similar term buildup that @rmackay9 mentions regarding post-pivot oscillation?
On the topic of pivots, I didn’t notice much oscillation after turns, but I did see that x-track error was worst at the beginning of any given segment, so there may be merit to zeroing or damping the I-term as suggested.