Yuri, thank you very much. I’ll try again tomorrow. You have been very helpful throughout the process. I may have gotten a little deep into the tullee bushes… So, you are doing pivot turns at any angle >10… Far out. Thanks so much for the advice and numbers. Gives me something to look at tomorrow. Not sure what ATC_STR_ANG_P is? During my rover tuning script with my tank, some atc_str parameters were changed, but I don’t think ATC_STR_ANG_P was… I see default is 2, so you have slightly increased it to 2.66. Does this increase how aggressively it turns back to the proper heading?
ATC_STR_ANG_P converts the vehicle’s heading error into a desired turn rate. Higher values lead to a more aggressive turn towards the destination.
In simpler terms - if pivots undershoot, increase this term. Reduce if they overshoot.
And now for the pure S-Curve variation of nearly equal precision…
Use the parameters I changed above, and then set:
ATC_STR_RAT_MAX,60
ATC_TURN_MAX_G,0.12
TURN_RADIUS,0.2
WP_PIVOT_ANGLE,0
WP_RADIUS,0.1
This could probably be tuned even better, but I think I’m done here.

1 Like
I don’t know about SITL… but in the real world we are getting <5cm Xtrack error about 95% of the time… We pivot when the turn angle is >50 degrees and use s-turns otherwise. Our mower is 250kg, deck is 137cm, strips 120cm apart (17cm overlap), and we mow at 1.8 m/sec. We tuned per the docs including using the autotune script.
2 Likes
Thanks so much, guys. Yuri for parameters and Chris for practical results. I’ll try again and see what happens. The dream of RTK precision may or may not translate to practical results in my lawn, my mower, my skill-set.
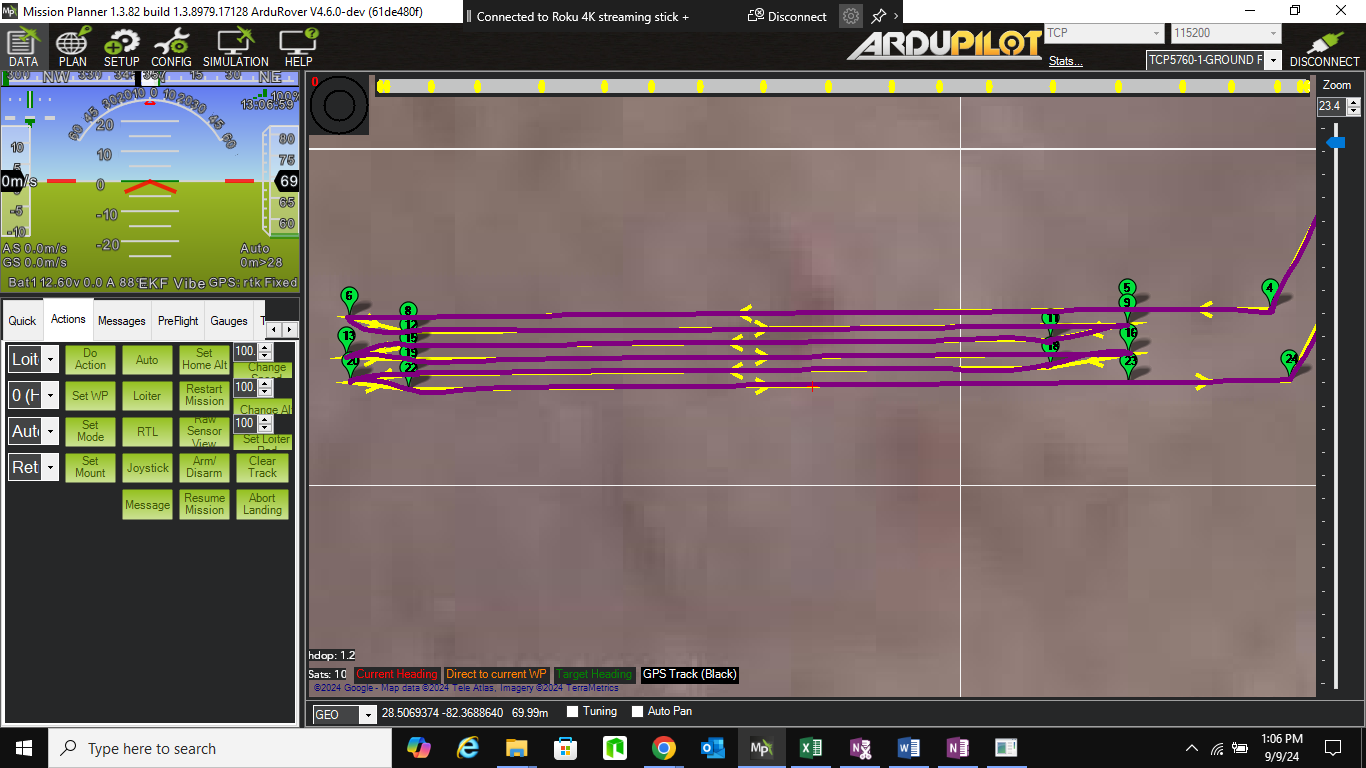
OK. Looks good. Sim. Lines are .6m (24") apart. Run is 30m (100’). This appears usable. Time to crank up the tank. Thanks for all the help, guys. Peace.

Don’t think you can just apply those same parameters to your own machine. They are extremely vehicle specific.
I understand. The sim takes the specific vehicle out of it. I actually have 2 vehicles: a tank as a test vehicle and the mower itself. Baby steps. Tank next.
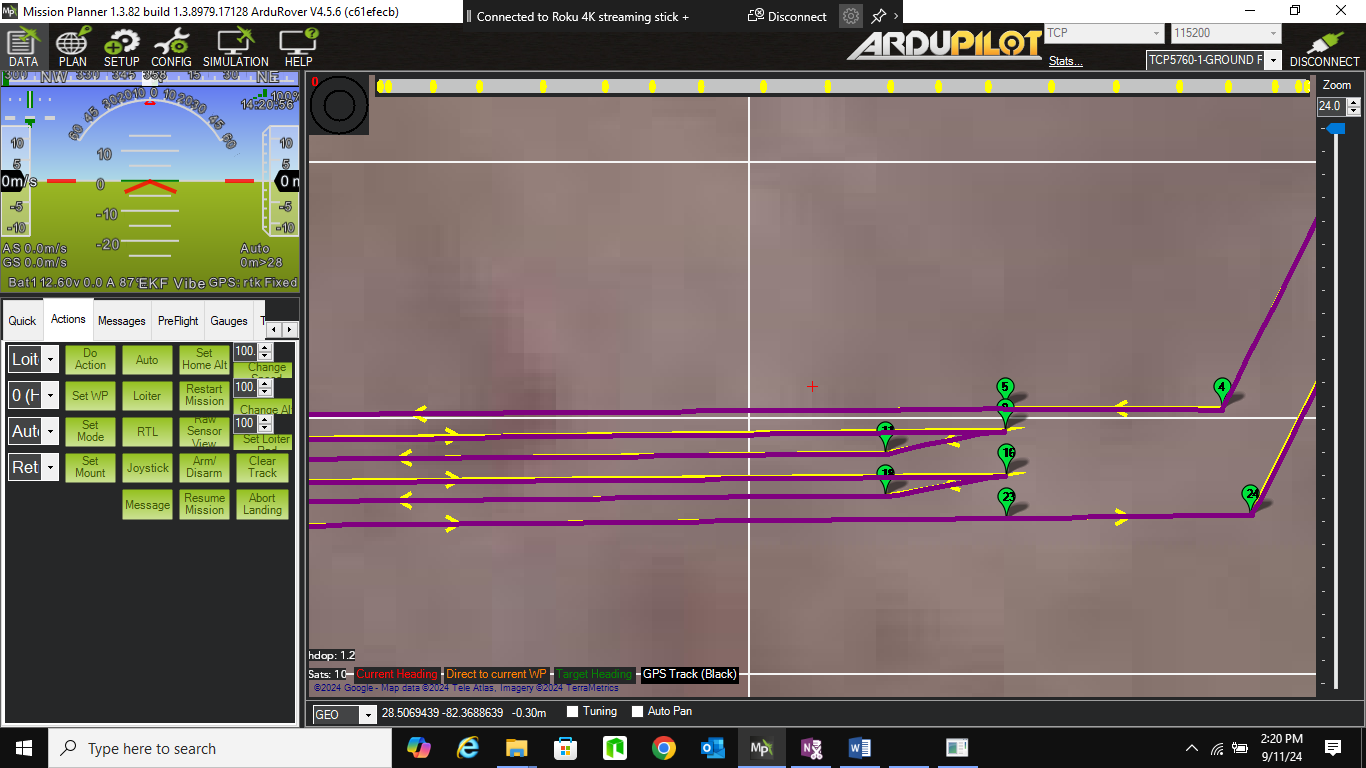
I won’t post any more after this. But it looks perfect to me. Simulator. Rover enters at WP4, Leaves at WP24. 3 different kinds of turns at the left side–all worked. Both pivot and regular turns in this run. No overshoot. No undershoot. These plots are at max zoom, 0.6m between rows. No more than the width of the line divergence from plan, I guess 2". While I didn’t print it, even the starting plots (prior to WP 4 and after 24) were excellent. Next step is to run my test tank in the real yard and see how it goes. Thanks to Yuri, Chris and others along the way who shared their time and expertise generously.