Normally between 10m and 20m should work. The radius needs to be small enough that the vehicle turns at 10deg/sec or more… so it also depends upon the speed of the vehicle…
Hi,
You may have misunderstood me.
It’s about an 85 cm RC small boat…
Will the new quick tune option be integrated in the new public FW?
THX ![]()
Hi @Zoli,
Really sorry about not seeing your response here.
Yes, QuikTune is included in 4.4. I’ve got a new version that we will probably backport to 4.4 and will certainly be included in 4.5.
… but to be clear what “integrated” means, Lua scripts are always separate from the main flight code binary so an extra step to install them on the autopilot’s SD card is always required.
Hello @rmackay9.
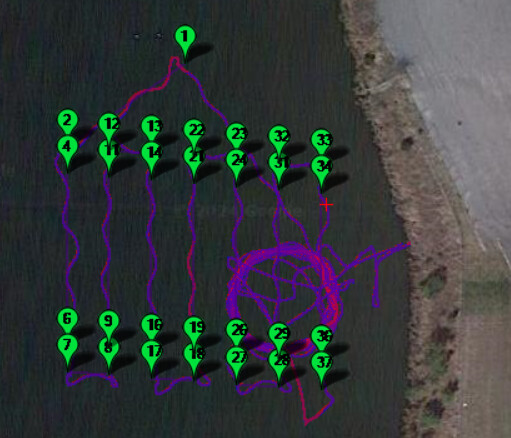
Thank you for releasing the quiktune script. We’ve used it successfully in the past for our autonomous boat to do some bathymetry work. We recently changed the hull and did a recalibration and retune but have found a significant variance in those sine curve patterns along our navigation path. Had speculated that it could be due in part due to accuracy limitations with WAAS corrections but some of the other comments in this thread make me think otherwise. Additionally there was an error in the logs with the dates recorded, unsure of what caused that but we’re not getting that issue anymore. We’re using Rover 4.4.0beta8. I’ve attached the pre-tune and post tune parameters as well as our tuning log below. We ran the script twice. Any suggestions to help us improve the system are appreciated.
Log: 00000018
Calibrated param 2024.1.29 Thruster Fix.param (15.5 KB)
Post Tune Params.param (15.5 KB)