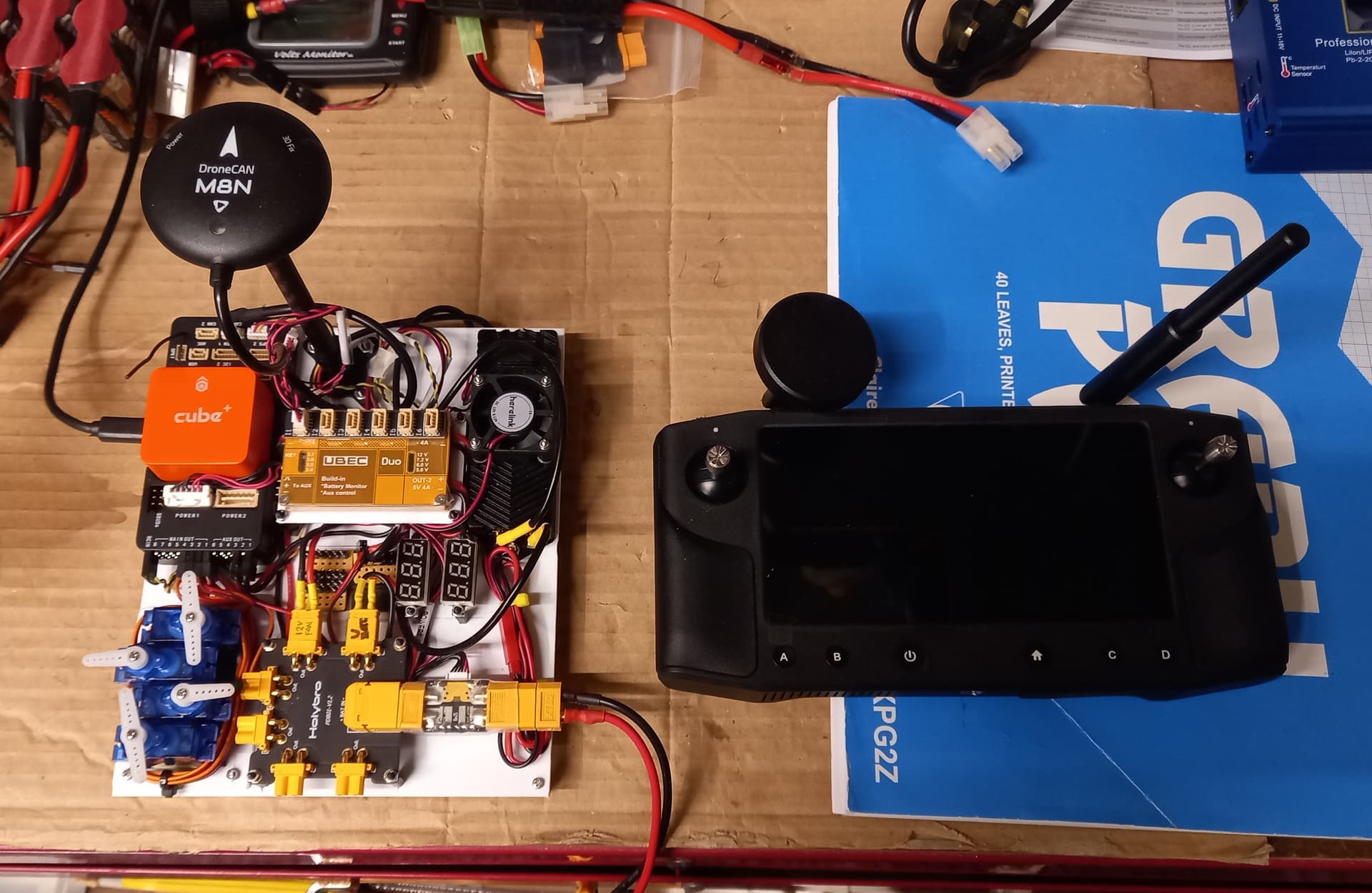
No, the assembly is still being bench tested, see pic., but the intention is for it to go into the Model Slipways kit, the AZIZ, or the mouse eaten old test tank hull, I am restoring. See other pics. Eventually the assembly will have Lidar, possibly a sonar unit and camera.
The plan is to test the assembly on the bench and prove it can be run in manual mode, before any proper tuning in a boat.
I have been doing the setup, with the assembly, on the edge of a table, 1/2 a metre from the south facing full height glass patio doors windows, in the dining room. Hence the GPS lock.
I will adjust the INS_GYR_CAL to = 0.


1 Like
Before changing the INS calibration parameter, set ARMING_CHECK =0 and arm in manual mode. Test that way and see if you get some output. Reset to ARMING_CHECK =1 before deployment.
ARMING_CHECK to =0, rebooted, Armed via actions in MP, Messages said “Throttles Armed.” Went to servo page, and moving all sticks randomly, produced no physical output to any channel, and no green bars showing on any channel, in the Servo output page.
When I configure this on a bench Flight Controller and use Motor Test the outputs change on the Servo Outputs screen as expected (Motors 1,2 and3). You are saying this doesn’t happen for you? Forget about the Radio for now.
Yes, you are right; it does happen. If I set a value on the motor test page, then go back to the servo outputs page, the green bars do show at the value set from the motor test page.
Then move on with the project. This is all you need to do on the bench.
1 Like
Re Motor test page:- Some of the buttons on the motor test page don’t function as expected.
The timer/time value is ineffective.
The test of motors in turn, does the 1st, but no others. The 1st starts, but doesn’t stop.
The stop all motors doesn’t return the motor output to a stop condition, the output remains at the manually pre-set value.
When individual motors are tested, they each receive the manually set number/percent, but stay there till the system is rebooted, or a new pre-set value is sent to each motor.
As regards putting everything in a boat, now, when the system won’t work in manual mode, from the transmitter, is a non starter. V4.2.3 does allow manual mode operation.
OK, so we have a bug in the omni vehicle which has been fixed by this PR by @mirkix.
I’ll include this in 4.4.5 which will probably start beta testing in about a week. Until then you could test it using “latest” which can be loaded from MP’s Firmware Install screen after pressing Ctrl-Q. You should see the label under the Rover icon change to “4.5.0-DEV”.
Thanks again for fiding this issue and thanks to @mirkix for fixing it!
1 Like
I had already backed out from V4.4, as I am convinced I couldn’t make progress. I am back on v4.2.3, which so far does what I expect. I have downloaded the v4.5.0 latest version, .apj etc., for the cubeOrangePlus, and will try to use that in due course.
I am going for laser eyes, and will be off internet for some days, so that will give me something to work with.
Many thanks. CC
1 Like
Hi I have just updated the PIX32-v6, with TX16S & X8R, to firmware v4.5.0-dev. All OK - on the bench.
Rebooted, and set the frame type and class to boat and Omni3. Rebooted, reconnected. Onto Setup, Safety switch off, Manually forced arming, (Yaapu confirmed “motors armed!”) and TX drives the esc’s/motors as it should. Yes.
Lots of further “fiddling” to come, and when I get back to the CubeOrange+/HereLink, I have great expectations of that too!
Again many thanks. Happy again.
2 Likes
Great stuff, thanks for the feedback. We will release the fix with 4.4.5 and it will certainly be included in 4.5.0 as well. Txs!
2 Likes
Hi
Just a quick note, I have cubeorange+, here link, working in manual mode on v4.5.0-dev.
So the mods work well for cubeorange and for pix32v6c. Exploring adding GPS, lidar etc., next.
Many thanks
1 Like
@rmackay9 since we cant currently use omni in auto modes, what about adding something simple like an option for the vehicle to use lateral control if heading error is under a set limit. so if say the heading error is under 15 degrees then it uses lateral thrusters to steer but if the heading drifts too far it switches back to correct the heading. it would be a simple way to get omni functions usable without adding more control loops.
1 Like