I am trying this version ArduRover 4.3beta4 on a balance bot with conventional sensored low KV brushless motors, with wheels directly driven (no pinions/gearboxes). I have looked (for the first time) logs of THR Speed/DesSpeed and I observe a huge 10x discrepancy:
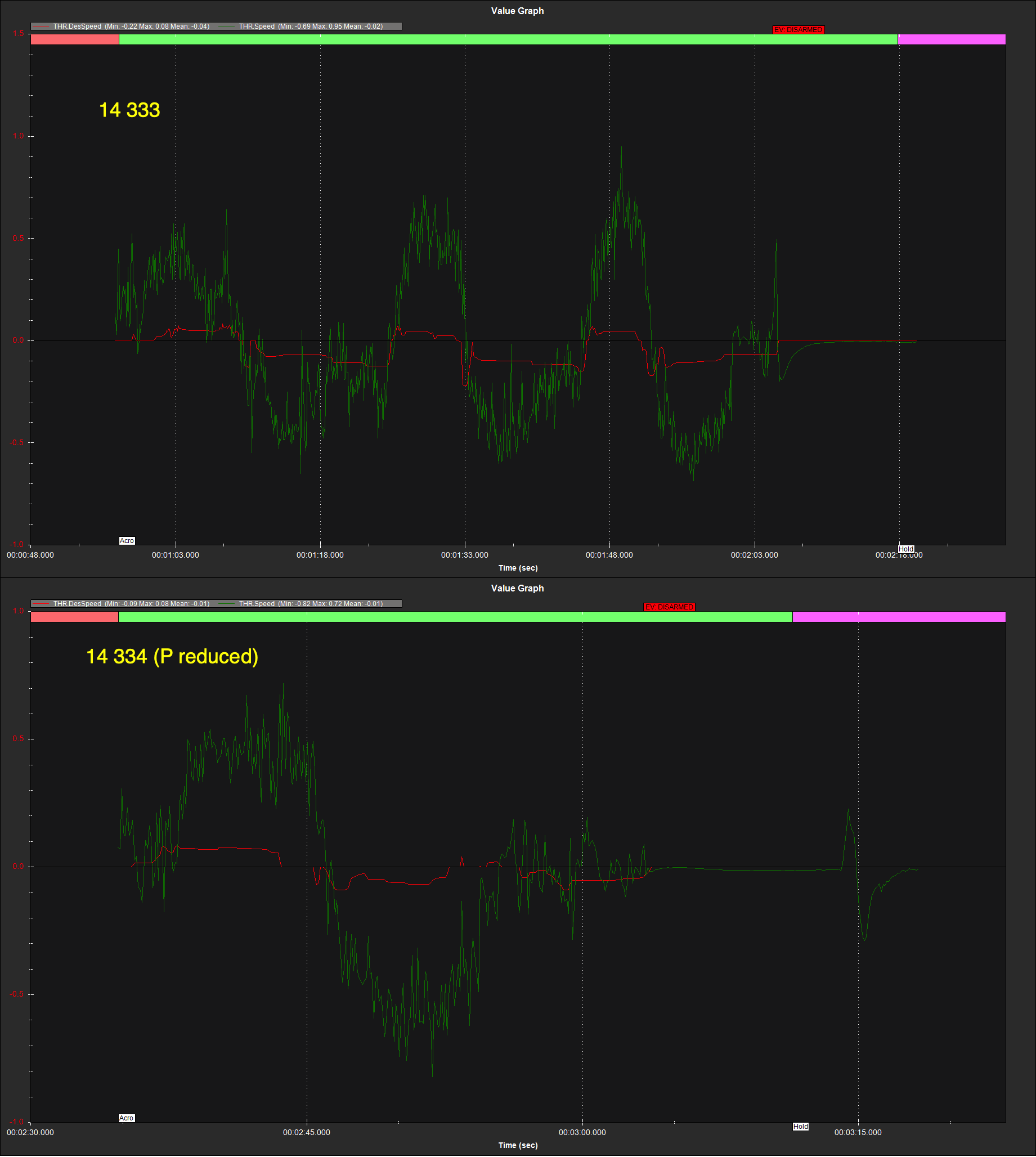
The trajectory for both is in Acro, forth and back a 3.5m straight at home (no GPS, wheel encoders). For the lower part I reduced P on the speed PID, and that made things worse.
The real behavior may be around 1m/s (3s each straight), so close to THR Speed.
Is this normal?
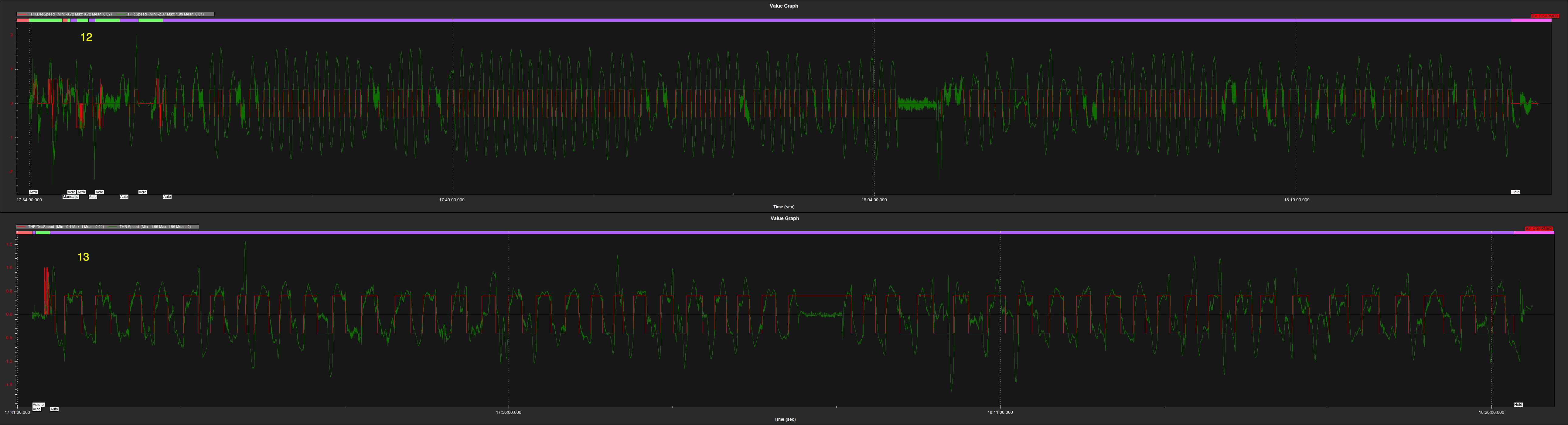
Examining past logs, discrepancy is much lower. This is the same, corresponding to this video:
More or less I maintain parameters from one version to next (except tilt PID on v4.2->v4.3)
BTW, I continue observing tilt vibration no matter what I try:
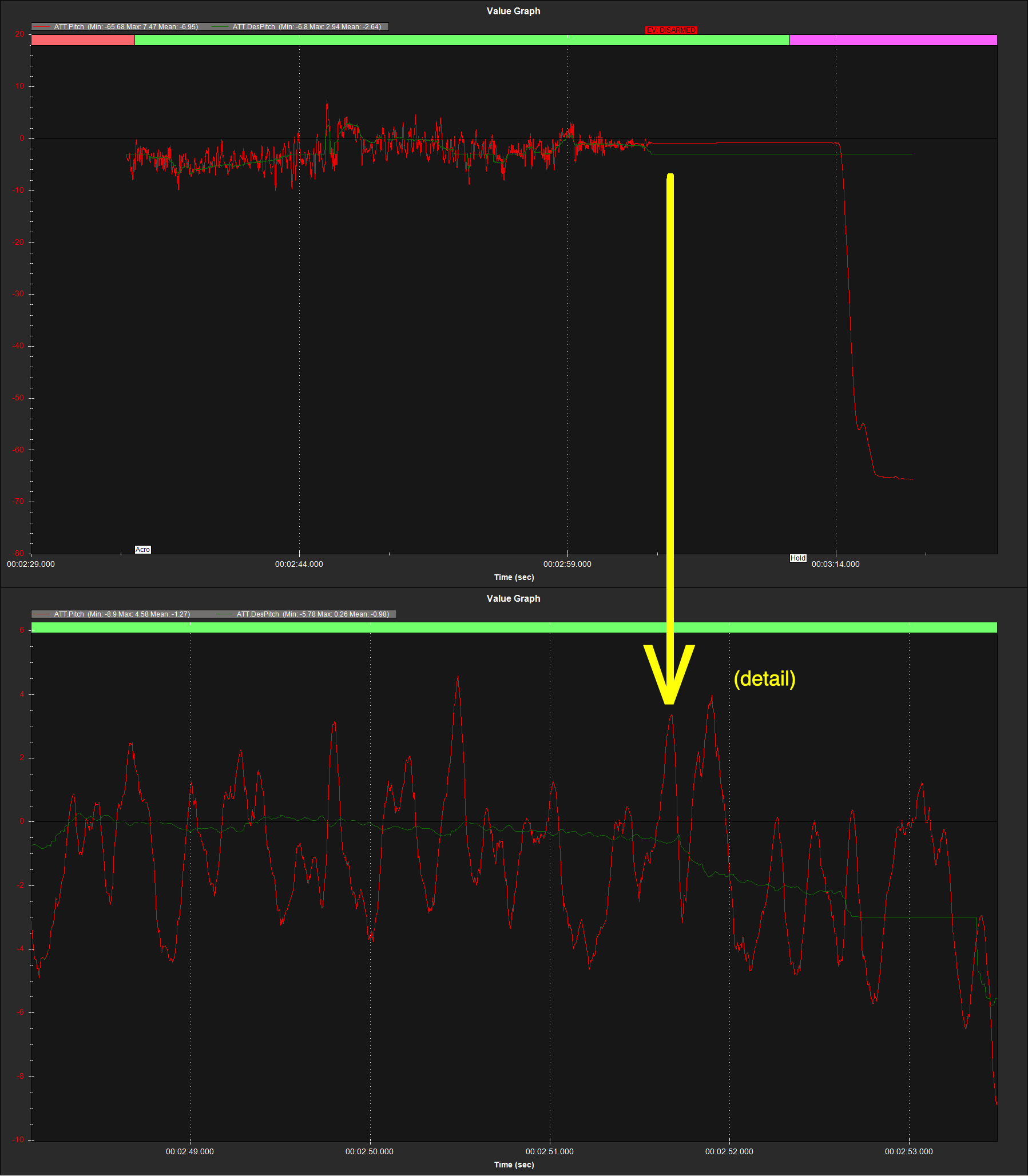
although in this case there are no teeth suffering it (wheels directly driven).