These are my impressions:
- v4.2: I assume it has the μs/ms bug in the IRQ handler (unexplainable to me how it could work however). No pitch oscillations and silent. However, I couldn’t tune in v4.2 the direct drive balance bot (low KV brushless sensored motors), although I didn’t try too much.
- v4.3: I assume the μs/ms bug in the IRQ handler was corrected (although it can be completely changed to μs and optimized in time execution). Tuning more difficult, missions followed better than in v4.2 (at least indoors), but pitch oscillations (and noise) observed in curves and clearly on the direct drive balance bot. Tuning seems to require large ATC_BAL_D.
- v4.4: as tested on the direct drive balance bot, tuning possible with ATC_BAL_D values as in v4.2 and much less noise and pitch oscillation, so very promising, but falls unexpectedly (see video and log below).
I flashed Rover-440-pitchlim-14Nov2022.apj on the direct drive balance bot. Certainly, the wobble on this low KV brushless motor vehicle has improved a lot, and pitch curves seem to have no oscillations:
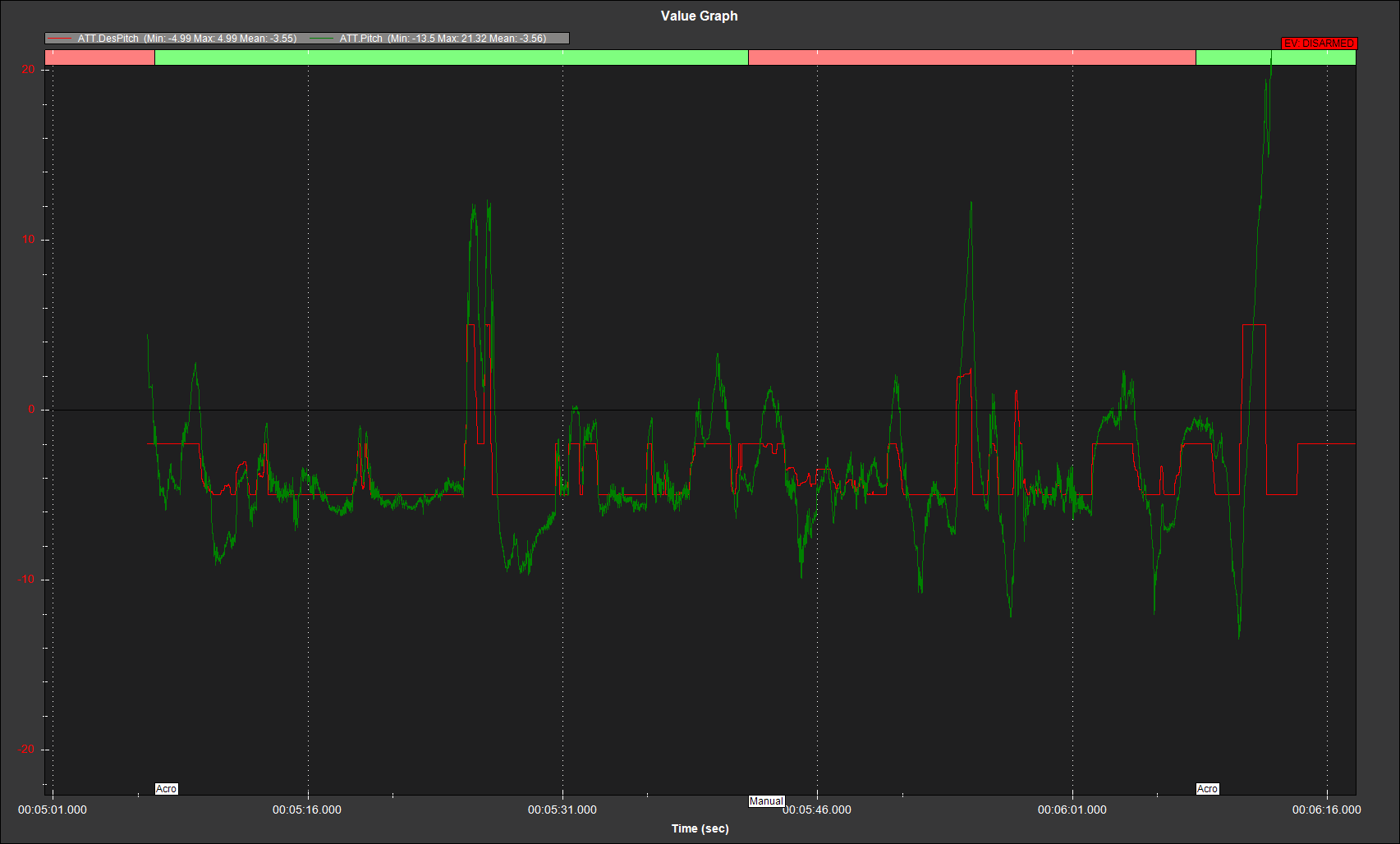
This is the log of it (BTW, ATC_STR_RAT_FF lowered) and this is the video with piddesired and pidachieved and the hud in MP.
So observe that piddesired and pidachieved traces move in Acro and not in Manual, but trying Acro a second time, piddesired (blue trace) doesn’t move and it falls immediately.
I don’t think I can test this indoors in a reduced space. Before trying on an outside track (such as here) I would like to have a version not falling easily.