Thanks for sharing, with v4.1.0-dev it started working almost out of the box, yaw is picked up correctly in the MP as well.
Based on the LEDs on MovingBase and Rover, I have a suspicion Fixed Base (simpleRTK2B V3) corrections are not reaching Rover/Moving Base.
Rover LED NO RTK - OFF
Moving Base LED NO RTK - ON
From MP perspective is there a way to see where is the disconnect? Is it safe to say, that by seeing this, FixedBase is at least sending the corrections?
I think so, considering that in Mavlink inspector coordinates are shown in both gps_int_raw and gps2_yaw, plus both GPS and GPS2 are showing 3D Fix and rtk fix in the MP dashboard.
That’s quick and dirty drawing of the msg flow setup currently.
Two things I am uncertain with:
Are UART* connections labeled correctly?
Is this correct msg flow for the corrections from the Fixed Base?
Heading and positioning works fine. But do not notice any difference whether FB is connected or not. Moving Base - NO RTK led is always ON, Rover - NO RTK is OFF.
I think that your UART labels are correct, but it would be good to check if the Pixhawk is really outputting the RTCM corrections on its serial port connected to the simpleRTK2Blite. To me, if you just followed the config from ArduPilot simpleRTK2B+heading configuration - ArduSimple, it disables the first GPS with GPS_TYPE,0 so probably nothing is sent from the corresponding serial port. Also, in case something is really sent, you might need to change the baudrate (params SERIAL?_BAUD, SERIAL?_OPTIONS, SERIAL?_PROTOCOL) if it is not the one supported by the simpleRTK2Blite UART1.
Instead, maybe change the config of SimpleRTK2B using u-center to disable its UART2 and follow GPS for Yaw (aka Moving Baseline) — Copter documentation (reset the Pixhawk to default params before) as if the SimpleRTK2B and simpleRTK2Blite were 2 separate ublox modules (if possible, the best would be probably to physically separate them)…
I restore here my previous post (Post 100 from 2022 Jan 26) that was removed, since the problem might not yet be solved:
I think I have also a problem with ArduRover 4.1.3 + ArduSimple. It works as expected for me with ArduRover 4.1.0-dev from commit 126456742a6a1f8a19cc9b187c0f59ea565e1d43 downloaded from https://firmware.ardupilot.org/Rover/2021-05/2021-05-27-11:05/ (now dead link). However, as soon as I update to 4.1.3, ArduRover seems to ignore the data from ArduSimple (although in CTRL+F > MAVlink inspector > GPS2_RAW > yaw gives correct values and Mission Planner shows RTK fixed). If I downgrade to the specific version I mention it works again. To try to debug, I think I tried the stable versions 4.1.2, 4.1.1, 4.1.0 and none of them seem to work. As soon as I go back to the specific good version everything works. I plan to check again especially with 4.1.0 but it is possible that a specific modification caused a problem in the middle of the development of 4.1.0 version (e.g. AP_GPS: change handling of moving baseline yaw · ArduPilot/ardupilot@f1cbfb3 · GitHub seems a big change)…
@jolivart What would be right place check in U-center whether FixedBase correction MAVLink Inject messages are reaching MB and/or Rover, maybe to look for something specific in UBX-RXM?
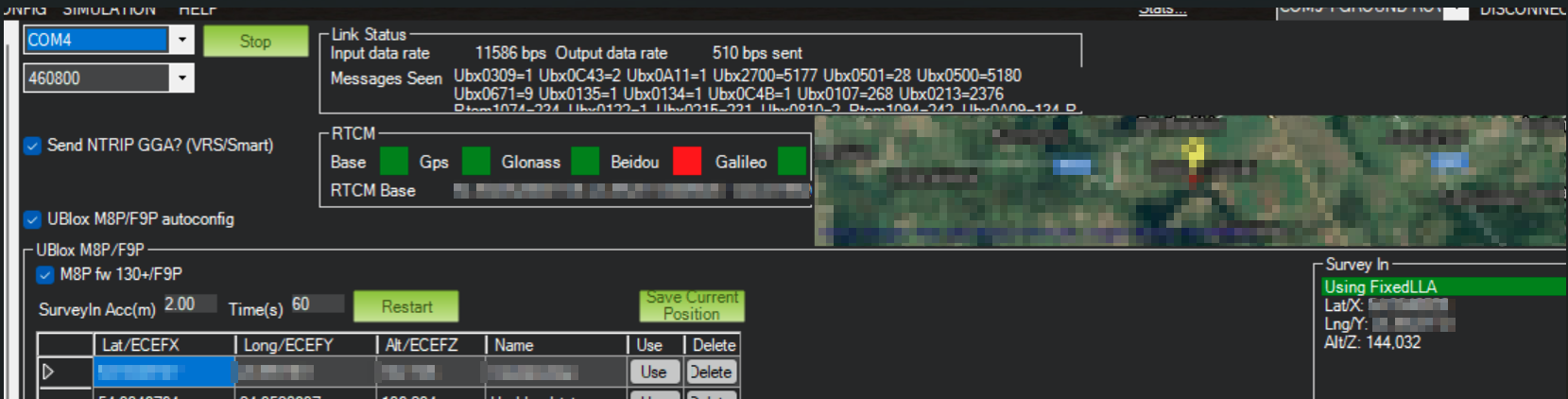
When both units (simpleRTK2B and simpleRTK2Blite) are mounted, you should connect to the POWER+XBEE USB connector to u-center (baudrate should be 460’800bps).
There, you can check the UBX-RXM-RTCM message, if you see RTCM messages there it means your moving-base base is getting external corrections.
Josep,
UBX-RXM-RTCM is empty on the MovingBase.
Tried enabling message 02-32 RXM-RTCM for UART1 in UBX-CFG-MSG, but did not help either.
Do you think it can be a problem in the PX4 setup?
Inject is set to 127
Hi all, we have received quite a few questions regarding this topic.
We will try to update the tutorial for the latest firmware version of Autopilot including the possibility to send corrections to the moving-base base GNSS receiver.
Does this make sense (to update the tutorial for the latest fw version)?
Our resources are a bit limited right now but will get back asap.
Thanks, Josep
Hi Josep,
as for ArduRover fw, Yaw worked for 4.1.0-dev, but not for 4.1.3. Hence there should be quite a few people using 4.1.0-dev for quite a while now, so I guess it makes sense preparing config tutorial first of all for 4.1.0-dev.
But it’s unavoidable, that sooner or later tutorial should be aligned with later fw versions.
Many thanks, looking forward to hear from you again
Thank you, what is not very clear to me is how can i inject my rtcm connection (coming from str2str on a rspberry). Is there a free serial port where i can send data on the simpleRTK3B?
Hi Josep,
in case tutorial has been updated already, where it could be found? Base Config file seems to be unchanged V00 in Configuration Files - ArduSimple
Hi @Muse@Corrado_Steri I finally created a new tutorial that allows to use the simpleRTK2B+heading kit with external RTK corrections from Mission Planner or any GCS software.
You can find it here:
Please follow it step by step since it is very similar to the previous one but the role of the receivers has changed, and there are also some other changes.
The problem was hard to find and is related with two devices using the same UART port and electric logic levels.
I finally end up changing the role of the boards and is working now, very important to disable GPS_AUTO_CONFIG or everything stops working.