p.s.
Sorry F/ R mode ESC, typed error.
Can’t see the video as it says not supported. Your parameters seem very different. Glad your making progress.
Very interesting setup :). How good is your GPS reception? The motor seems to be covering it’s view a bit?
Classic Ublox NEO-M8N
Krasimir,
I had a quick look at the logs, the throttle control looks pretty OK but I think the steering control can be improved (wiki).
One issue may be that the vehicle is not very responsive. It looks like it’s maximum turn rate is about 10deg/sec. That’s very slow so although we can probably get it working better than it is now, it’s always going to have troubles overcoming disturbances (i.e. wind, current). It might be good to allow the servo to turn the motor more. Lowering SERVO1_MIN and increasing SERVO3_MAX may help a little.
You might as well reduce:
- ATC_STR_RAT_MAX from 360 (default) to 15 (i.e. 15 deg/sec)
- ATC_STR_ACC_MAX from 180 (default) to 30
- TURN_MAX_G from 0.6 to 0.1 (this is not very important)
For tuning steering’s turn rate controller, the most important parameter to tune is the ATC_STR_RAT_FF so perhaps set ATC_STR_RAT_FF to perhaps 10.
ATC_STR_RAT_I is far too high at 800 (!), it should probably be more like 5.
ATC_STR_RAT_P can also probably be about 5.
By the way, this boat should be controlled better if Vectored Thrust is enabled so maybe try setting MOT_VEC_THR_BASE to 20.
These suggestions are slight guesses so it may not work well but I think it’s worth a try.
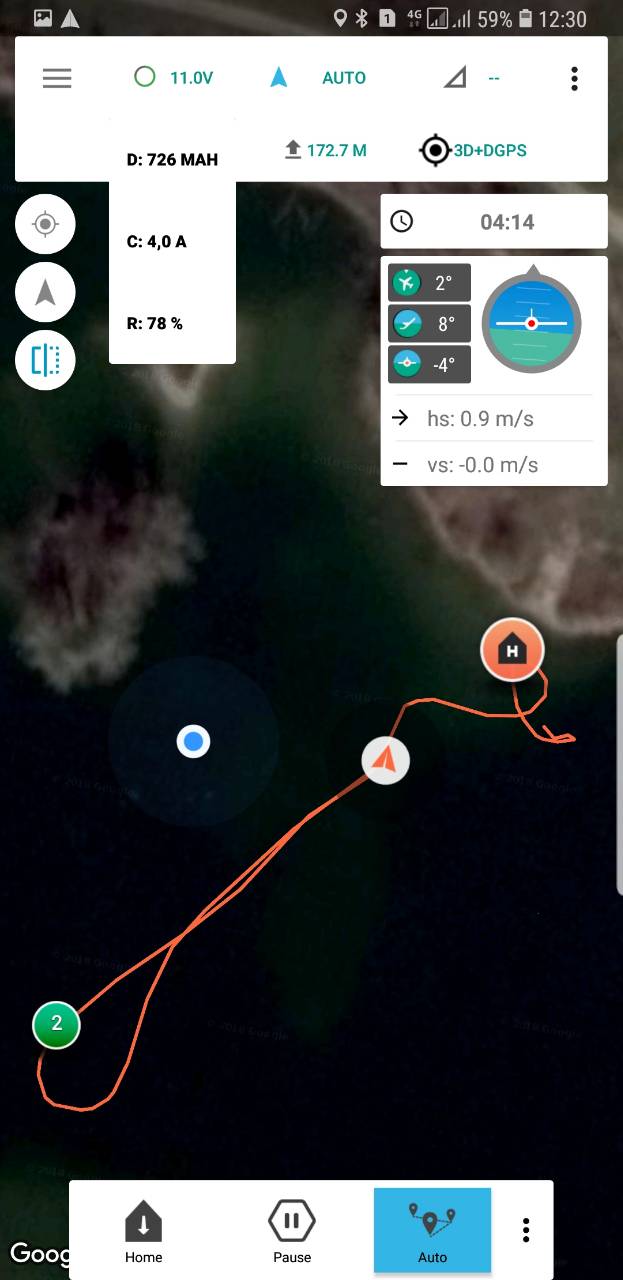
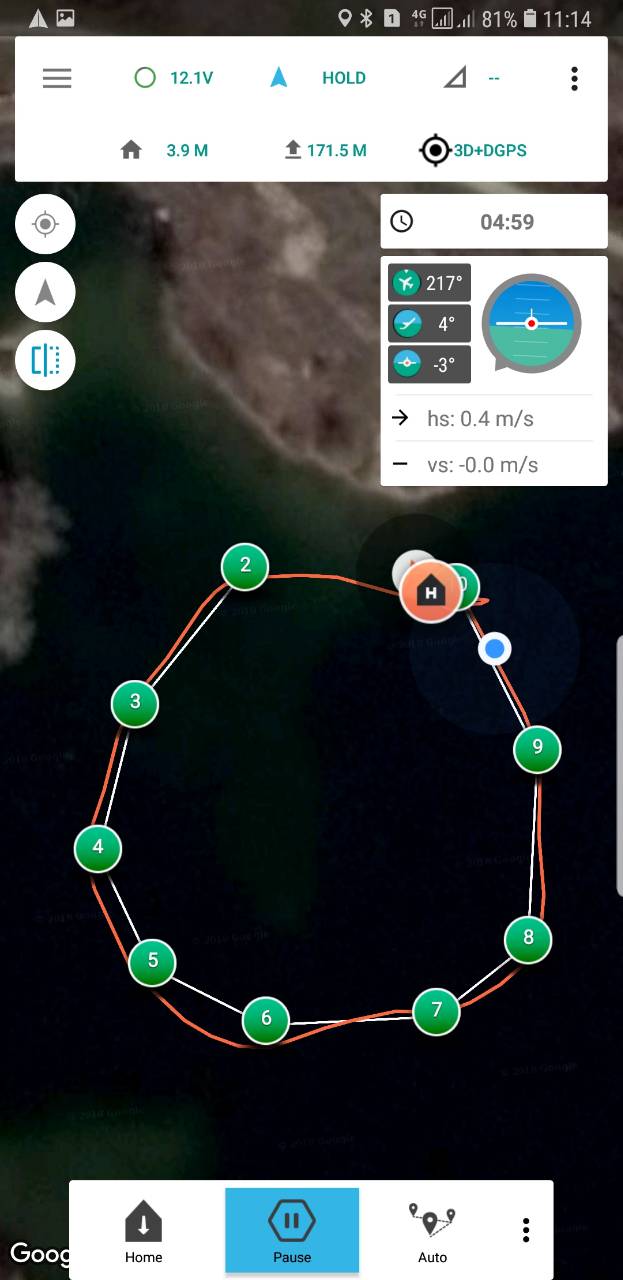
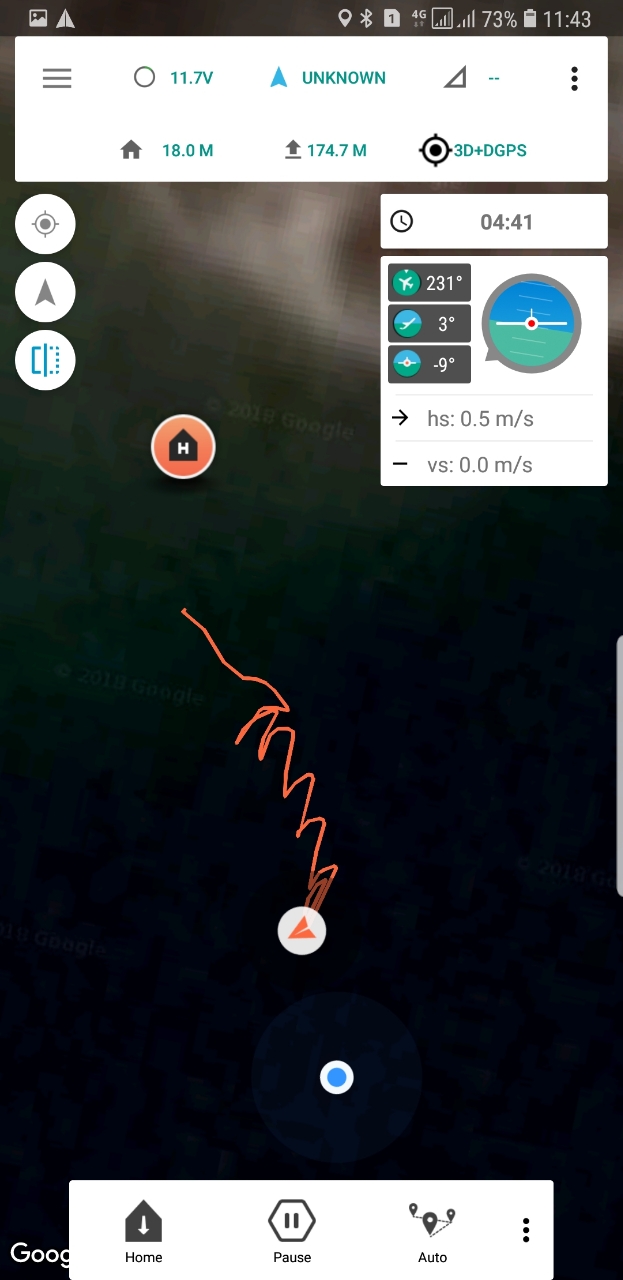
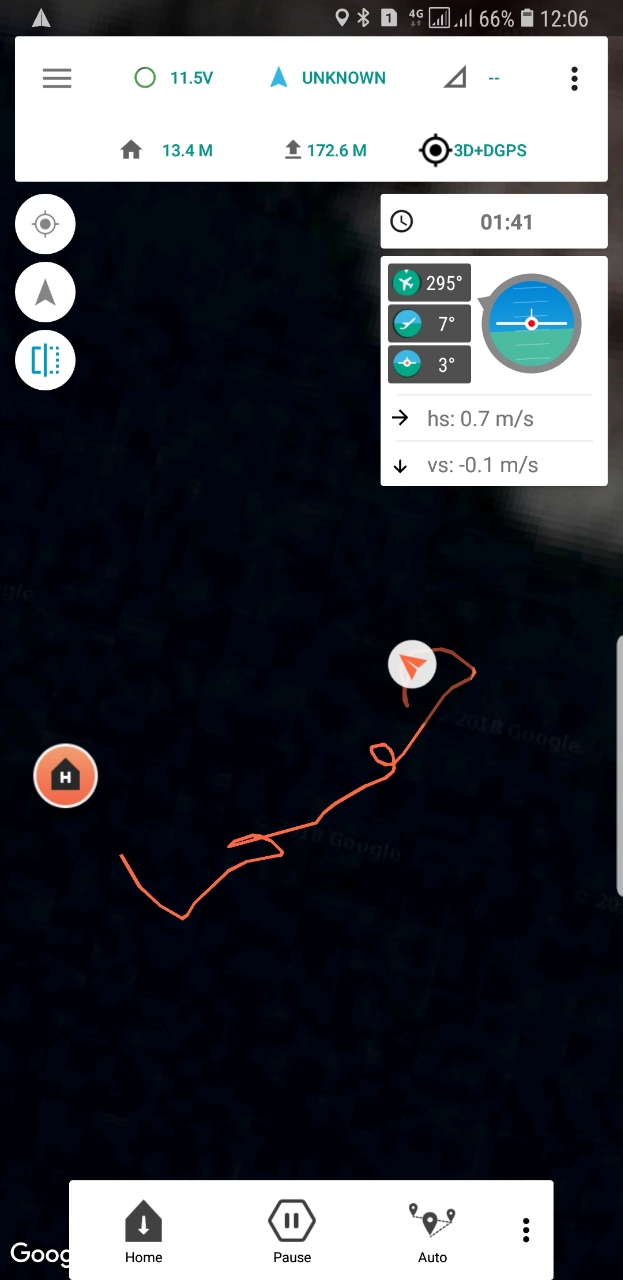
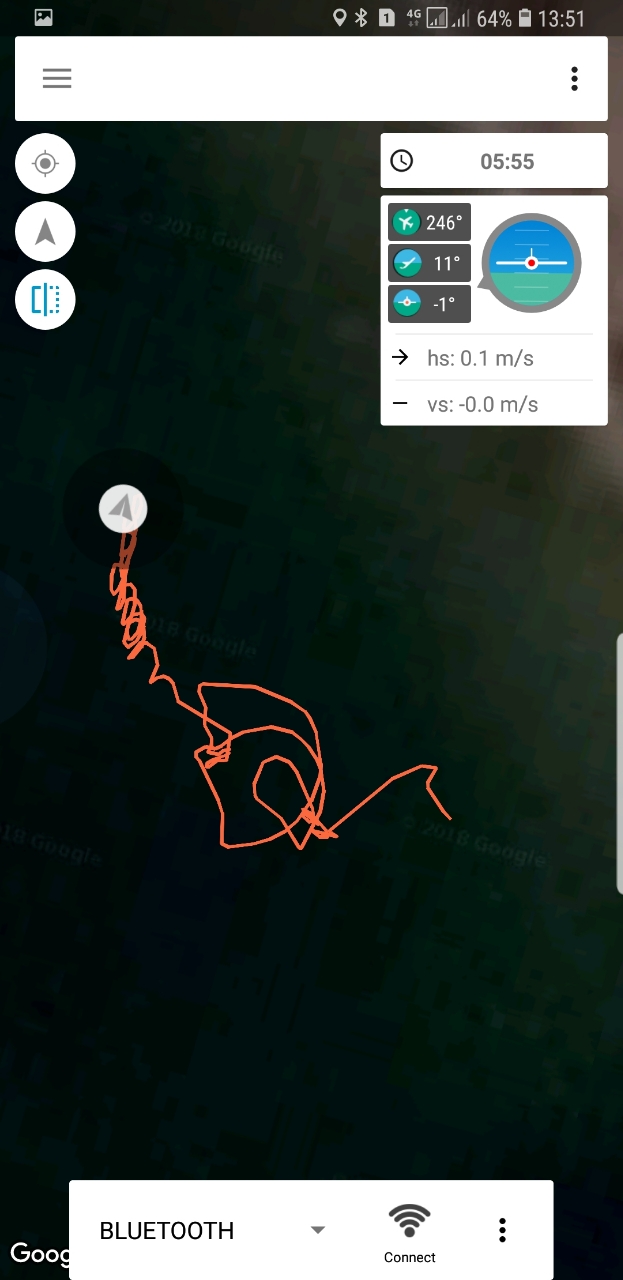
Hello Randy, Thank you for your suggested parameters! Today I had the opportunity to test, I apply photos for the movement of the points. I have a question about LOITER mode . Why is there zigzag movement and gradually moving away from the point? How do I move smoothly into LOITER mode because it is now a little aggressive?

Krasimir,
Any chance you have some dataflash logs? Logs have the details of what’s going on but without it, it’s mostly guess work.
@rmackay9
Hello Randy
@rmackay9
Hello Randy,
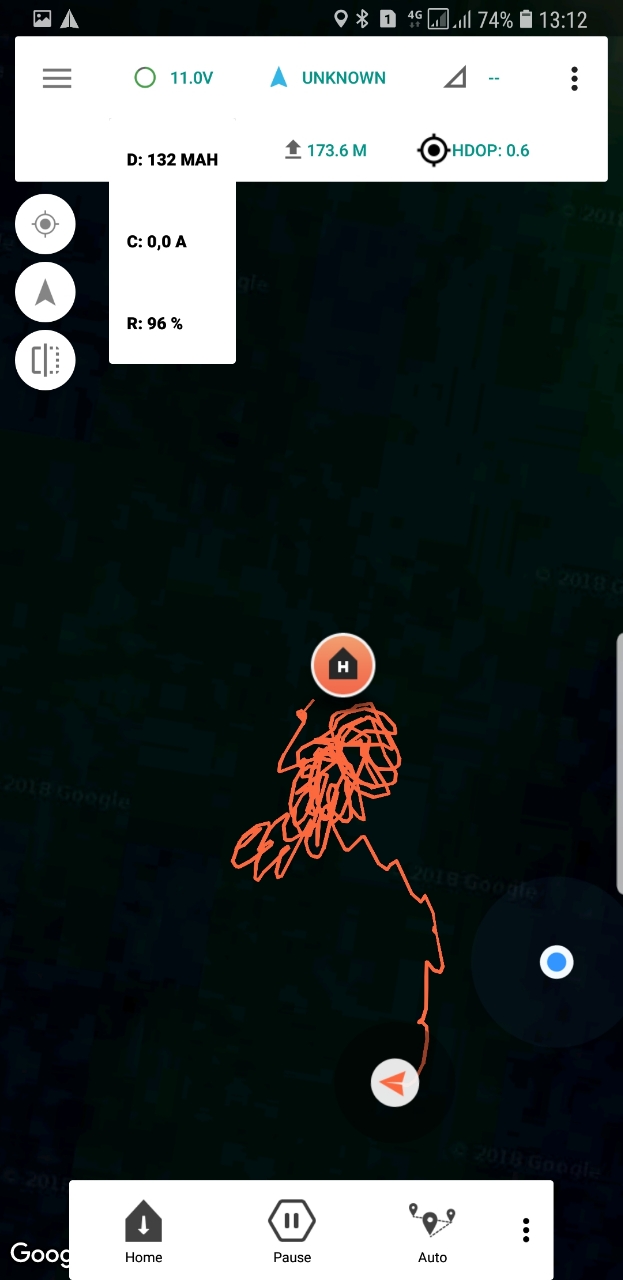
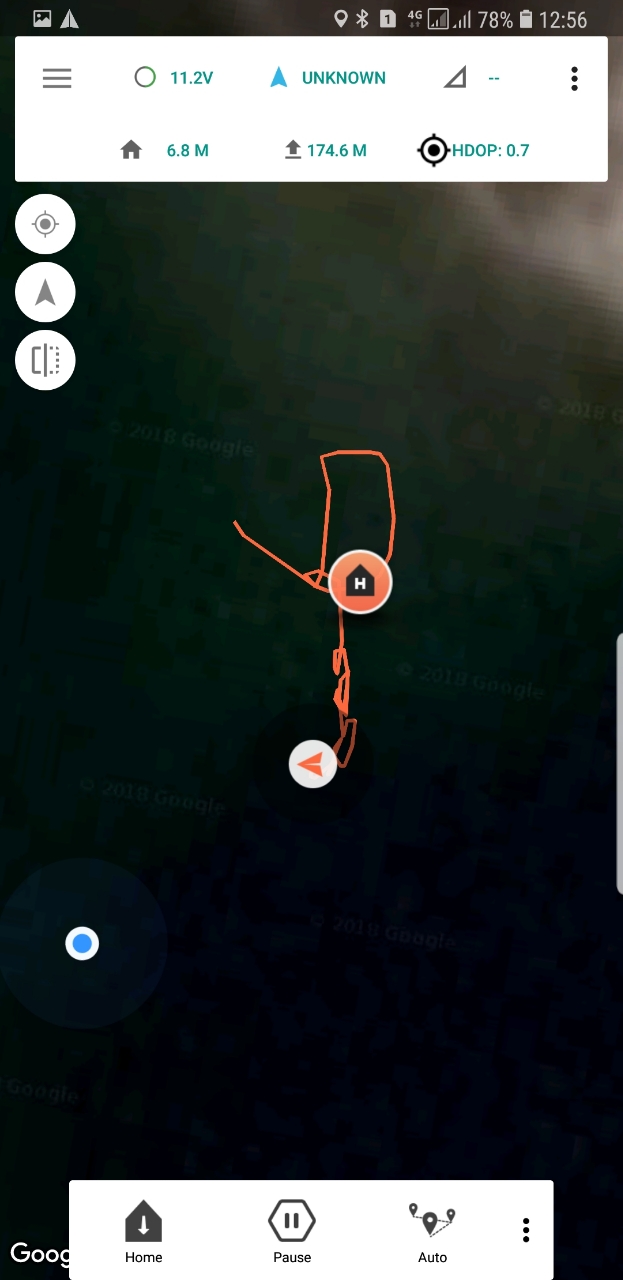
Today I tested again and got the same movements and moving away from the point in Loiter mode. Did you look at the logs you asked for? I also apply today’s logs.Thank you for your cooperation.
1 Like
Looks like you may have serious compass problems. I just took a quick look.
Hi Krasmir,
Sorry for the slow response.
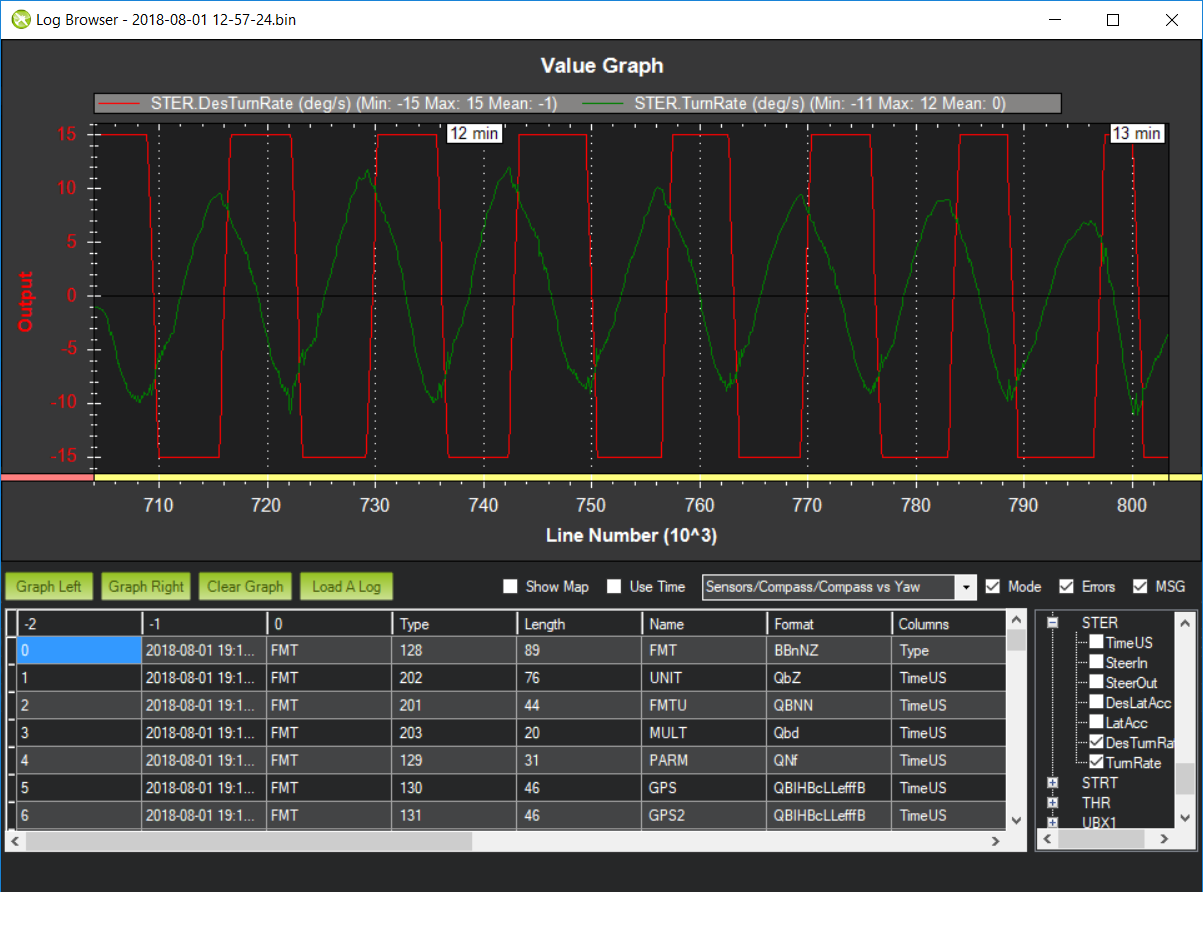
It looks like the steering response is backwards. The graph below shows the desired turn rate (red) vs the actual (green) and you can see that they seem to be reversed. You’ve tested this boat in regular waypoints and it does move in the correct direction right? It doesn’t drive away from the waypoint does it?

Hello Randy,
Thanks for the reply. What should I do to flatten these rotation speeds? I noticed that during the Loiter mode, the steering wheel turns completely left and, with the forward motion of the blade (zigzag movements), approaches the point. The steering wheel and the compass are not oriented towards the entered position - I apply video. When performing a mission from several points the steering is pointing in direction and the accuracy is very good. Are these movements correct for the Loiter mode?