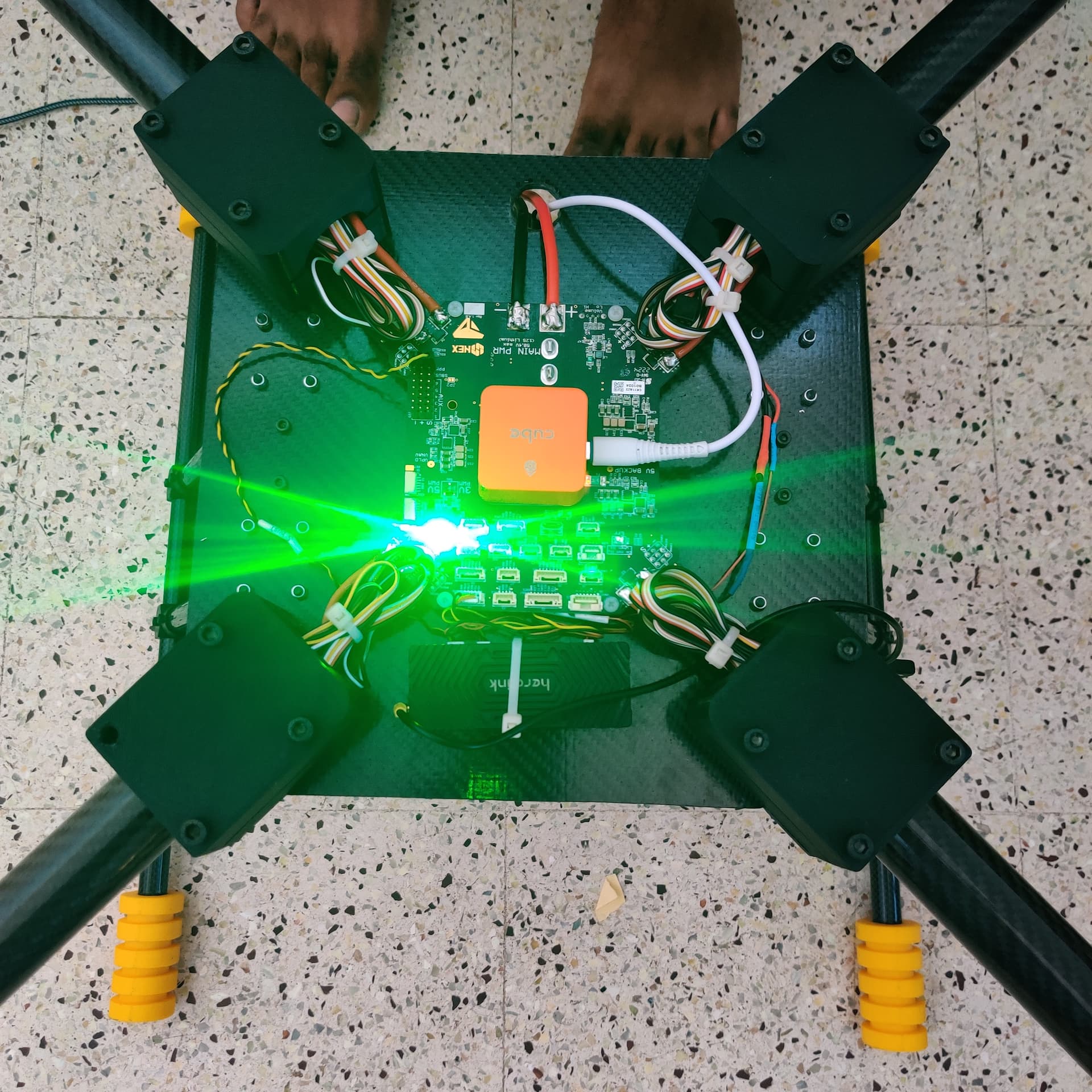
The FC is mounted in this way
Actually we have reduced the length of the power cable.
Will reduce more…
The FC is mounted in this way
Actually we have reduced the length of the power cable.
Will reduce more…
Definitely take the USB cable out of the Cube. There’s a USB connector on the carrier board and you’ll need the right connector to permanently mount a remote USB socket somewhere convenient.
The GPS cable is not pictured, but they are notorious - there’s a thick relatively inflexible cable to take care of. I strip back some of the outer insulation for about an inch near the connector, so the small wires have more flexibility. You’ll need some system to ensure that cable is not vibrating or touching the Cube when you put the top plate on.
You’ll need to secure the battery cables where they come through that hole, and so they have some slight flexibility between the securing point and the carrier board.
I would also undo those bundles of wires from each arm, shorten and neaten them and make it a more permanent installation. Having any of those bundles even touching the carrier board will induce vibrations.
Secure the other smaller wires too, even if you just put tape over them so they dont vibrate around.
With that style of carrier board I would also mount it on some antivibration mounts - not so much for the antivibration properties exactly, but more to make sure the carrier board isnt a structural part of the copter. While it is hard-mounted vibrations and any flexing will also be transferred to the carrier board and may eventually cause cracked tracks or failed components. This doesnt happen with the standard carrier board because they are much smaller, and they are in a relatively hard case that is secured (not the circuit board itself).
I would use something like these, as an example. There’s many different sizes available online.

The GPS is mounted in this manner.
Apart from wiring and mechanical issues is there anything else to be taken care ?
Planning to use mountable XT90 and anti vibration mounts for carrier board.
It appears 1 of the 4 screws is missing in the lower left are mount.
Hi,
Shawn was right, but this is just my minor input. The vibe happened right after you did some yaw, so let’s check propellers, central hub and motors too.
Hello @bigboy061293
I will check my foldable props (whether it is too loose), and arms along with some tidy wiring and fly once after that.
@xfacta
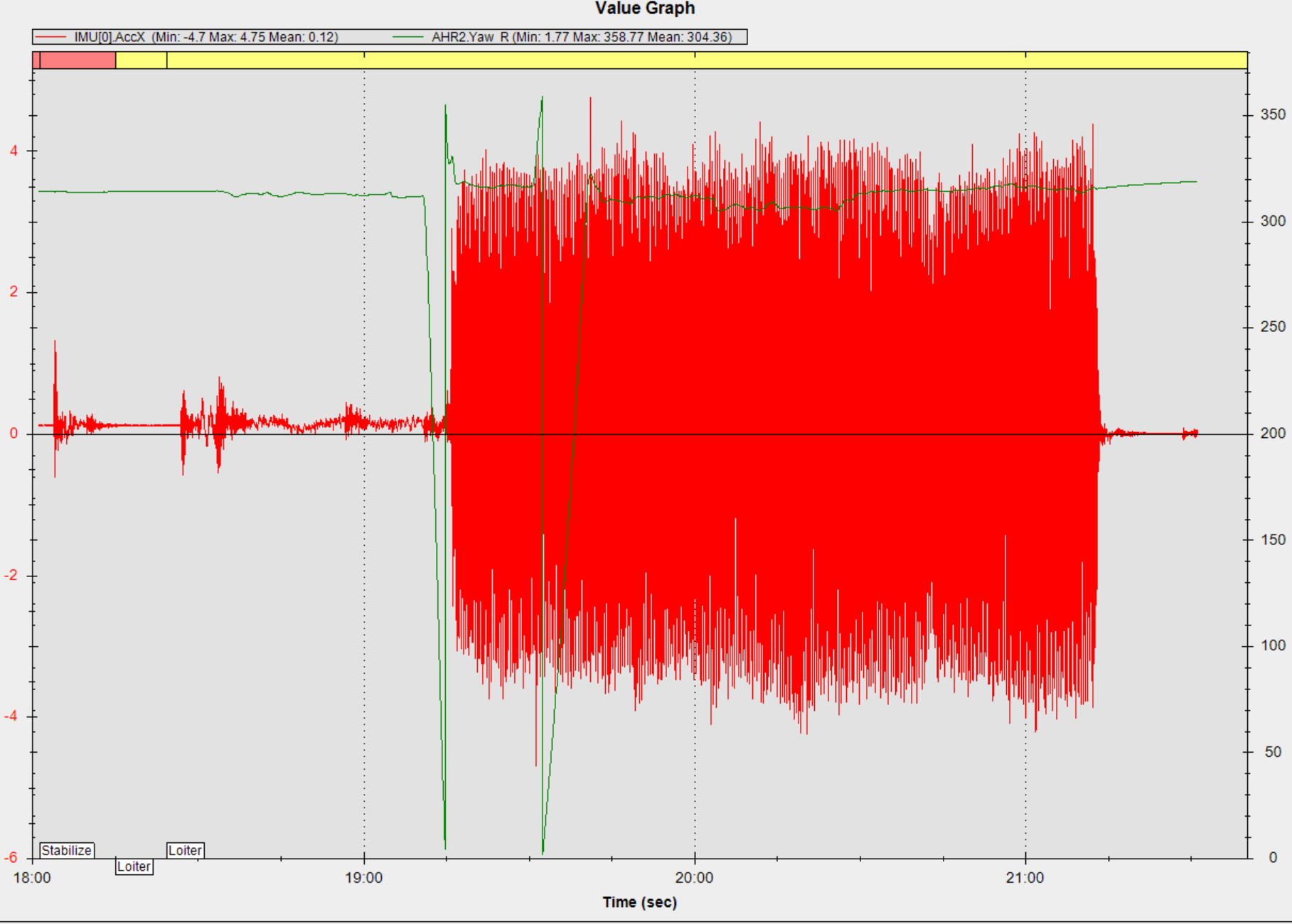
Hello sir, I have an update!
We have used anti-vibration mounts for carrier board and mountable plugs to reduced the vibrations.
Please help me to setup the notch filter.
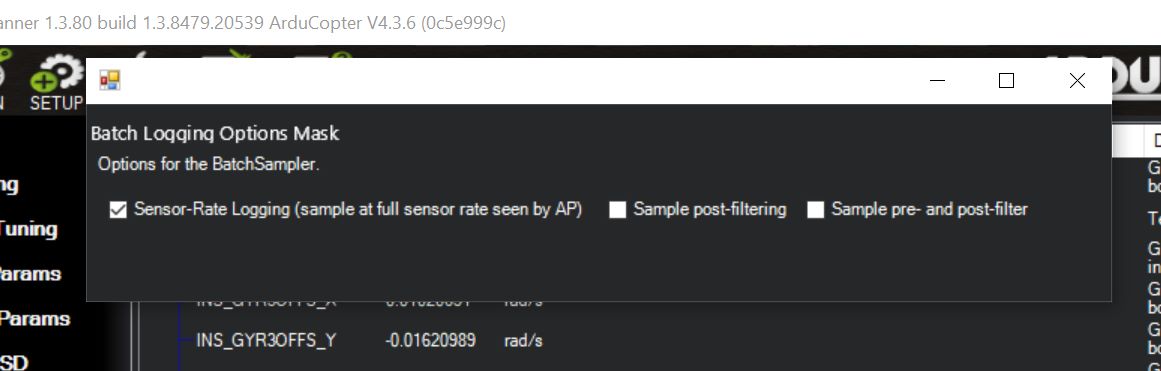
I am attaching sensor rate log and sample pre and post filter log.
Senor rate log: sensor_rate_logging - Google Drive
Pre and post filter log:sample-pre-and-post-filter - Google Drive
Thank You
The vibration levels are excellent now, good work.
Attitude control is still showing some unsteadiness but the notch filter and autotune should sort that out.
I’m not sure why you have GPS_GNSS_MODE,127
but the correct setting will be
GPS_GNSS_MODE,65
GPS_GNSS_MODE2,65
Assuming the copter is now in a near-final configuration we should be able to set the harmonic notch filter with some confidence.
A throttle-based harmonic notch filter at 48Hz plus harmonics
INS_HNTCH_ENABLE,1 // set this then refresh params to see the rest
INS_HNTCH_BW,20
INS_HNTCH_FM_RAT,0.7
INS_HNTCH_FREQ,48
INS_HNTCH_HMNCS,7
INS_HNTCH_MODE,1
INS_HNTCH_OPTS,0
INS_HNTCH_REF,0.125
A narrow static notch at 37Hz
INS_HNTC2_ENABLE // set this then refresh params to see the rest
INS_HNTC2_BW,12
INS_HNTC2_FREQ,37
INS_HNTC2_HMNCS,0
INS_HNTC2_MODE,0
INS_HNTC2_REF,0
OK to leave this in place, no need for the sensor-rate logging
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
Try this too, it doesnt affect attitude control at all, just how sensitive the copter is to your stick inputs
ATC_INPUT_TC,0.2
And adjust these to
PSC_ACCZ_I,0.28
PSC_ACCZ_P,0.14
Now you should be able to do a short test flight to make sure everything is OK. Start in Stabilise and switch to Althold if everything seems OK. Only use Loiter if you need to, and not for the whole flight.
If that is all good, you can run Autotune probably one axis at a time. Do not change Autotune aggressiveness from the default value. Select the axis - pitch, roll then yaw last - using the AUTOTUNE_AXES bitmask.
When you run autotune you will need a very large area clear of buildings and trees, the copter will move around a lot. You can reposition it but the more repositioning you do the longer autotune will take.
Once autotune finishes, the twitching stops, just reposition and land without switching out of autotune mode. Disarm and then after a couple of seconds you can change flight modes and test.
Hello Sir,
@xfacta
We did all the recommended changes and here is the log of both Althold and Loiter mode.
Please go through the log and let me know if are we ready for autotune or not.
Thank You.
Log:
https://drive.google.com/drive/folders/1kK4ZXEU1-rWkz-kqL4PvoJNVdlFCcuQi?usp=sharing
Video:
")
The video looks good, I’ll check the log later.
Sure, Go through the log when you are free
Thank you ![]()
You could have set
INS_HNTCH_REF,0.125
I would select individual axis and do Autotunes. Do yaw last.
Less wind is best, prefer no wind at all. Sometimes early in the morning is best for no wind.
You will probably need a way of recharging batteries between Autotunes, or have spares.
You will need about 100m by 100m free with no trees, poles or buildings and no overhead wires.
I changed INS_HNTCH_REF because my MOT_THR_HOVER is changed to 0.141
Is it right to set that INS_HNTCH_REF to MOT_THR_HOVER ?
Use the value I specified.
The actual formula is
INS_HNTCH_REF = hover_thrust * (min_freq / hover_freq)^2
but my value will be close enough for your copter.
You can alter
ATC_ACCEL_Y_MAX,20000
and that should improve yaw a bit, reduce the overshoot and undershoot a bit. Autotune may produce a lower value and you would be able to increase it manually again. But let’s see what autotune does.
Do not select the YawD autotune option when setting the axis to tune.
Ok sir
Thank you for your valuable suggestion.
Will change the INS_HNTCH_REF and proceed to auto tune.
and
ATC_ACCEL_Y_MAX,20000
in case you dont get to do yaw autotune, or you want to get in more flight time before autotune.
Sure Sir, will set all the recommended parameters and do some more flights before going to autotune.