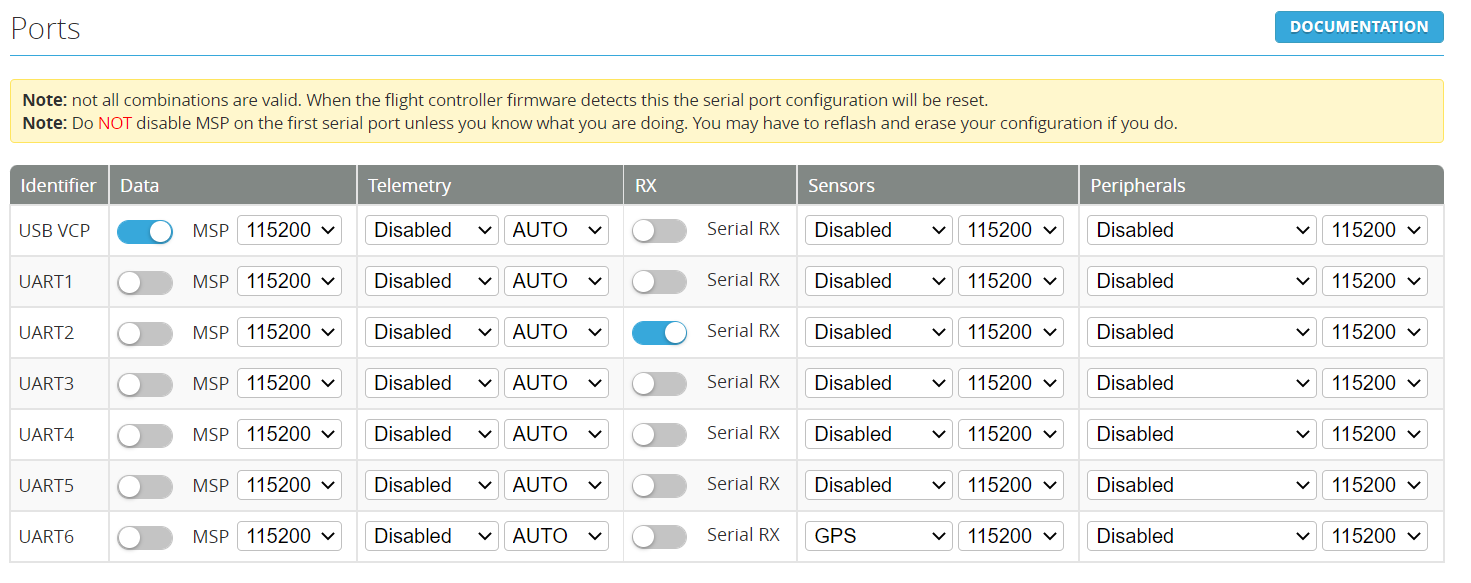
These are INAV Configurations which works wit my copter
Please let me know your working setup, Thabks for your help. Much appreciated.
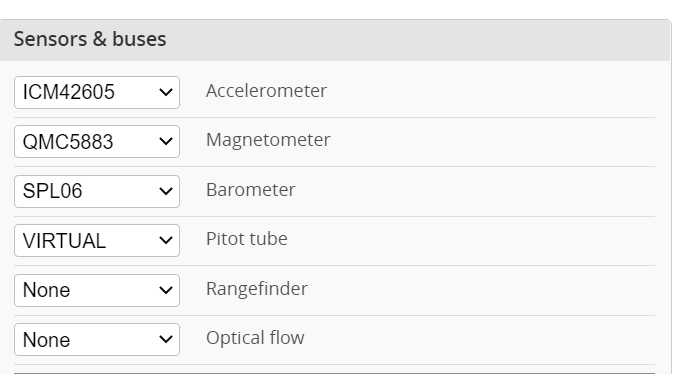
Is your compass detected?
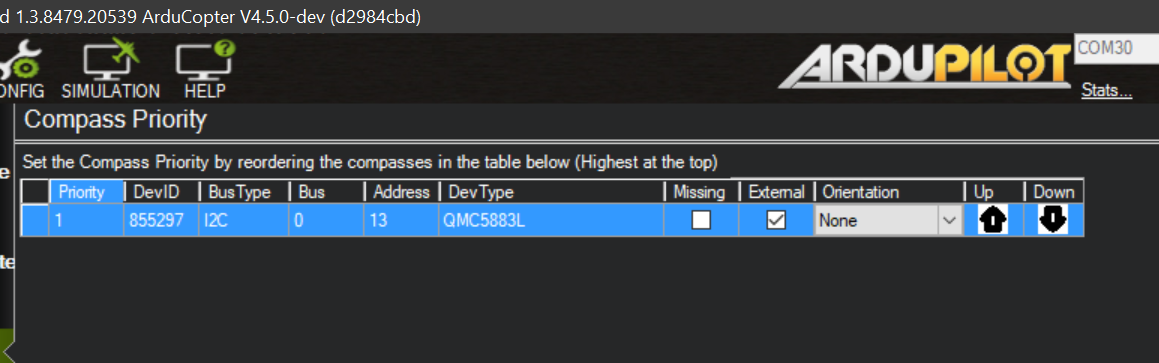
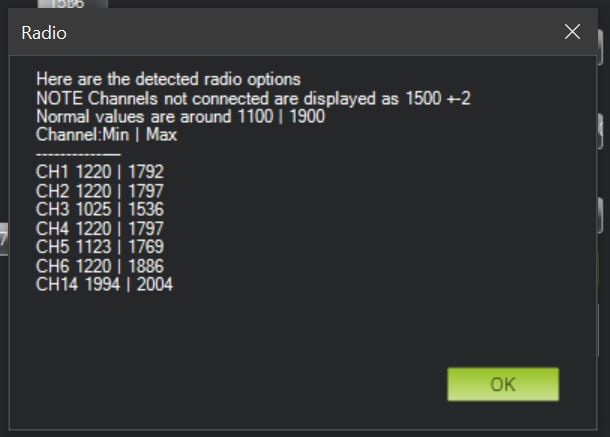
I managed to calibrate the compass and the receiver after realoading and reconfiguring.
Now I can not do the motor test it complains RC Not calibrated. Voice mesage but dialog box has different message.
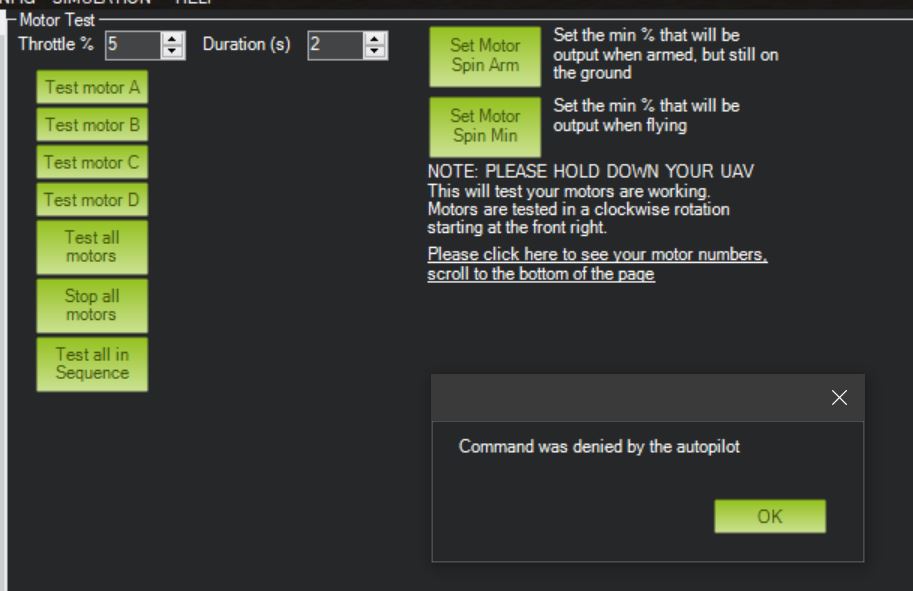
I managed to get the motors running also. but stuck threads error messages are heard from voice messages
11/14/2023 12:04:00 AM : PreArm: AHRS: waiting for home
11/14/2023 12:04:00 AM : PreArm: Compass not healthy
11/14/2023 12:04:00 AM : PreArm: Baro: not healthy
11/14/2023 12:03:29 AM : PreArm: Logging failed
11/14/2023 12:03:29 AM : PreArm: AHRS: waiting for home
11/14/2023 12:03:29 AM : PreArm: Compass not healthy
11/14/2023 12:03:29 AM : PreArm: Baro: not healthy
11/14/2023 12:03:20 AM : AP_Logger: stuck thread ()
11/14/2023 12:02:58 AM : PreArm: Logging failed
11/14/2023 12:02:58 AM : PreArm: AHRS: waiting for home
11/14/2023 12:02:58 AM : PreArm: Compass not healthy
11/14/2023 12:02:58 AM : PreArm: Baro: not healthy
11/14/2023 12:02:48 AM : AP_Logger: stuck thread ()
11/14/2023 12:02:38 AM : EKF3 IMU0 MAG0 initial yaw alignment complete
11/14/2023 12:02:36 AM : EKF3 IMU0 tilt alignment complete
11/14/2023 12:02:31 AM : EKF3 IMU0 initialised
11/14/2023 12:02:31 AM : EKF3 IMU0 forced reset
11/14/2023 12:02:27 AM : PreArm: Logging failed
11/14/2023 12:02:27 AM : PreArm: AHRS: waiting for home
11/14/2023 12:02:27 AM : PreArm: Compass not healthy
11/14/2023 12:02:27 AM : PreArm: EKF attitude is bad
11/14/2023 12:02:27 AM : PreArm: Baro: not healthy
11/14/2023 12:02:27 AM : PreArm: Need Alt Estimate
11/14/2023 12:02:25 AM : finished motor test
11/14/2023 12:02:23 AM : starting motor test
11/14/2023 12:02:21 AM : finished motor test
11/14/2023 12:02:19 AM : starting motor test
11/14/2023 12:02:18 AM : finished motor test
11/14/2023 12:02:16 AM : starting motor test
11/14/2023 12:02:15 AM : AP_Logger: stuck thread ()
11/14/2023 12:02:12 AM : finished motor test
11/14/2023 12:02:10 AM : starting motor test
11/14/2023 12:01:56 AM : PreArm: AHRS: waiting for home
11/14/2023 12:01:56 AM : PreArm: Check mag field (xy diff:161>100)
11/14/2023 12:01:38 AM : Frame: QUAD/X
11/14/2023 12:01:38 AM : RCOut: DS300:1-4 PWM:5-9
11/14/2023 12:01:38 AM : speedybeef4v4 0043004D 32325010 2039384D
11/14/2023 12:01:38 AM : ChibiOS: 3ef1657d
11/14/2023 12:01:38 AM : ArduCopter V4.5.0-dev (d2984cbd)
11/14/2023 12:01:38 AM : Frame: QUAD/X
11/14/2023 12:01:38 AM : RCOut: DS300:1-4 PWM:5-9
11/14/2023 12:01:38 AM : speedybeef4v4 0043004D 32325010 2039384D
11/14/2023 12:01:38 AM : ChibiOS: 3ef1657d
11/14/2023 12:01:38 AM : ArduCopter V4.5.0-dev (d2984cbd)
11/14/2023 12:01:37 AM : Frame: QUAD/X
11/14/2023 12:01:37 AM : RCOut: DS300:1-4 PWM:5-9
11/14/2023 12:01:37 AM : speedybeef4v4 0043004D 32325010 2039384D
11/14/2023 12:01:37 AM : ChibiOS: 3ef1657d
11/14/2023 12:01:37 AM : ArduCopter V4.5.0-dev (d2984cbd)
Do you have a sdcard installed?
Yes I did and took it out. All seem to work now. Thanks alot, I have to do a test flight when the rain stops. Will post the resuls.
Thank you very much.
My initial test had couple clitches, to fix them had to remap the servos and reversed pitch channel.
Tested with Altitude Hold and Loiter. Lift off to 10 meters and tested basic functions. Seems to be stable.
Is it possible to connect telemetry module to this FC 405 v4. Can not seem to find free port. Thanks
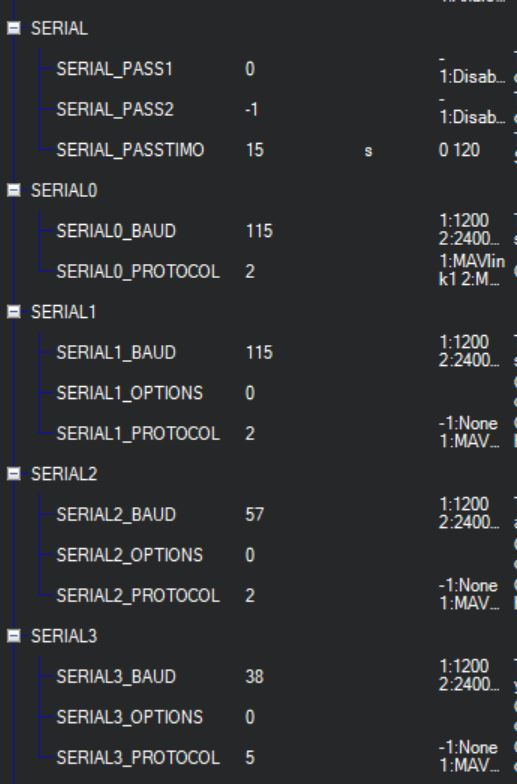
I have used ArduPilot firmware : /Tools/MAVESP8266/2021-10-15 version 1.2 of the MAVESP8266, flashed an ESP8266 Wemos Mini and attached it to serial port 3. I have the same setup on my other drone which has Mateksys H743. and in that case attached to serial port 2. Same protocol and same bvaud rate. I can use UDP to connect to my Mission planner on Matek but not on my F405 V4 only difference is the port number. Following is My Matek setup on serial port 2
Hi any suggestion to my telemetry problem, can not get it to work. Thanks