Yeah sure we will discuss the setup.
Just to add one thing idronam is just a internet packet router at the end and doens’t degrade or enhamce the performance but only the connectivity.
If there is any doubts just let me know.
Yeah sure we will discuss the setup.
Just to add one thing idronam is just a internet packet router at the end and doens’t degrade or enhamce the performance but only the connectivity.
If there is any doubts just let me know.
Yes, Rpanion-server can stream video. You’ll likely need a VPN too, to connect the RPi on the vehicle to your GCS.
What errors did you get? I usually test on RasPi OS Bookworm with a RPi 4 and 5, so that’s the best tested option.
Ill see if i can recreate the errors.
why don’t you use Drone engage via Ardupilot cloud? its designed to do exactly what your wanting to do. What is Drone-Engage ? — Ardupilot Cloud EcoSystem documentation
I use teamviewer to control the pi remotely.
Very interesting, I will look into this.
I use MAVLink Router to forward telemetry between the flight controller (using the serial onboard connection) and an IP connected base station. This allows to see what the vehicle is doing and to control it with my ground control station. For me it’s a more reliable alternative to telemetry radio.
Not sure which USB version you are using. But beware that USB-3 creates quite some interference to your GPS receiver!
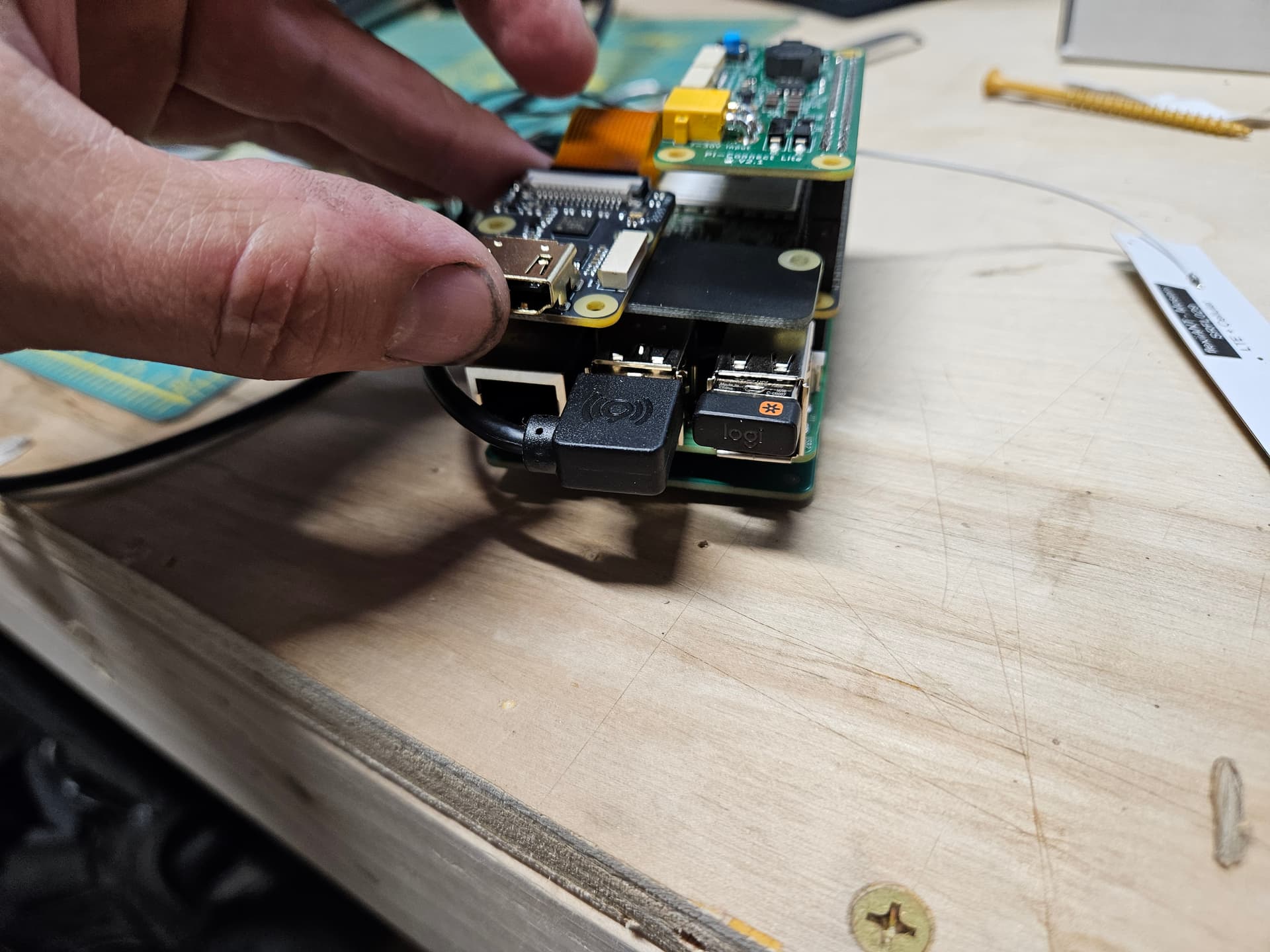
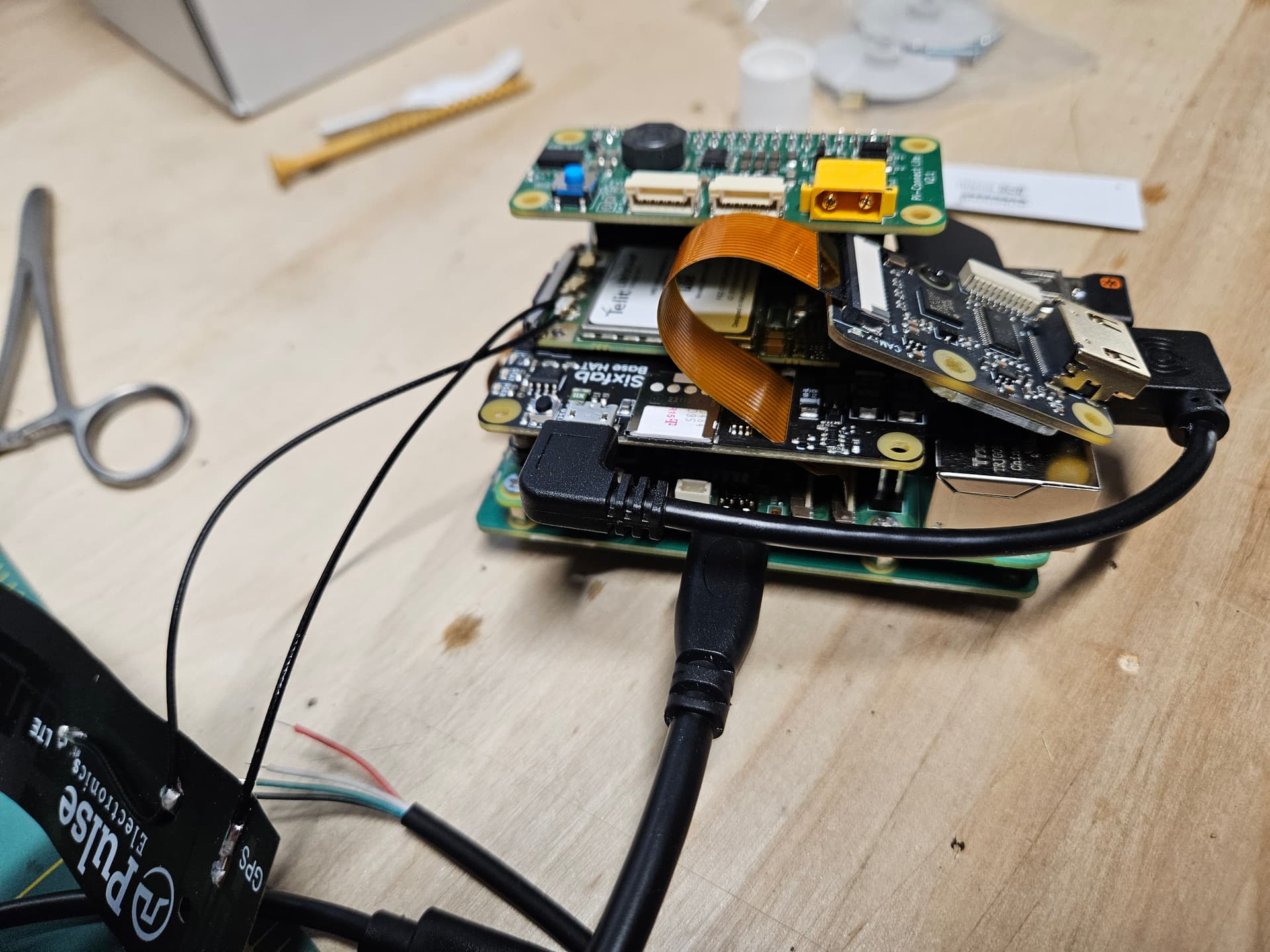
Haven’t confirmed this but ended up getting the Pi-Connect Lite V2 since the GPIO pins are not utilized by sixfab 4g modem hat.
I’ve done that sort of thing years ago and moved away from it.
Also didn’t bother with a LTE hat or so as a standard 4G wireless broadband dongle is ready to just plug into a USB port, can easily be swapped / upgraded and much more cost effective. There is also consideration in regards to weight.
Whilst telemetry and certain commands work mostly well, video transmission is rather disappointing due to the lag encountered. Never been able to find a fix for that as nothing seems to come close to a direct wireless connection in regards to speed. (Just think about all the different points the signal has to pass through to get from your aircraft on its way to your ground station)
Karl,
I do anticipate some lag. As long as its not severe. The idea is to have a 3rd telemetry link to gcs as a backup in case the rfd900x and the herelink fail. Itll be setup on a separate electrical bus / battery. Weight is not a concern at this point. With the airframe we are using i have room to add an additional 2kgs of weight before reaching max gross weight. The Genini V2 from Bearospace is a large fixed wing twin motor with a wingspan of 10.5 ft and a max gross weight of 20lbs ![]()
Right now, video streaming will be lower on the priority list but it would be nice.
I drive my rovers around with it, it works fine even in manual mode, the telemetry usually has a lower latency than the video and when flying a second of lag doesn’t matter as your not near anything else. the only time you will get a lot of video lag is when you get a low signal, the telemetry will usually be ok for much longer than the video.
@geofrancis thats fits my needs exactly. Ive tried drone engage. Ive tried to install Apsync.
For apsync, i can not seem to get the image file burned to the SD card. It’s saying that it’s not a valid image using Imager. Ive unzipped the file and selected that for the image to be burned.
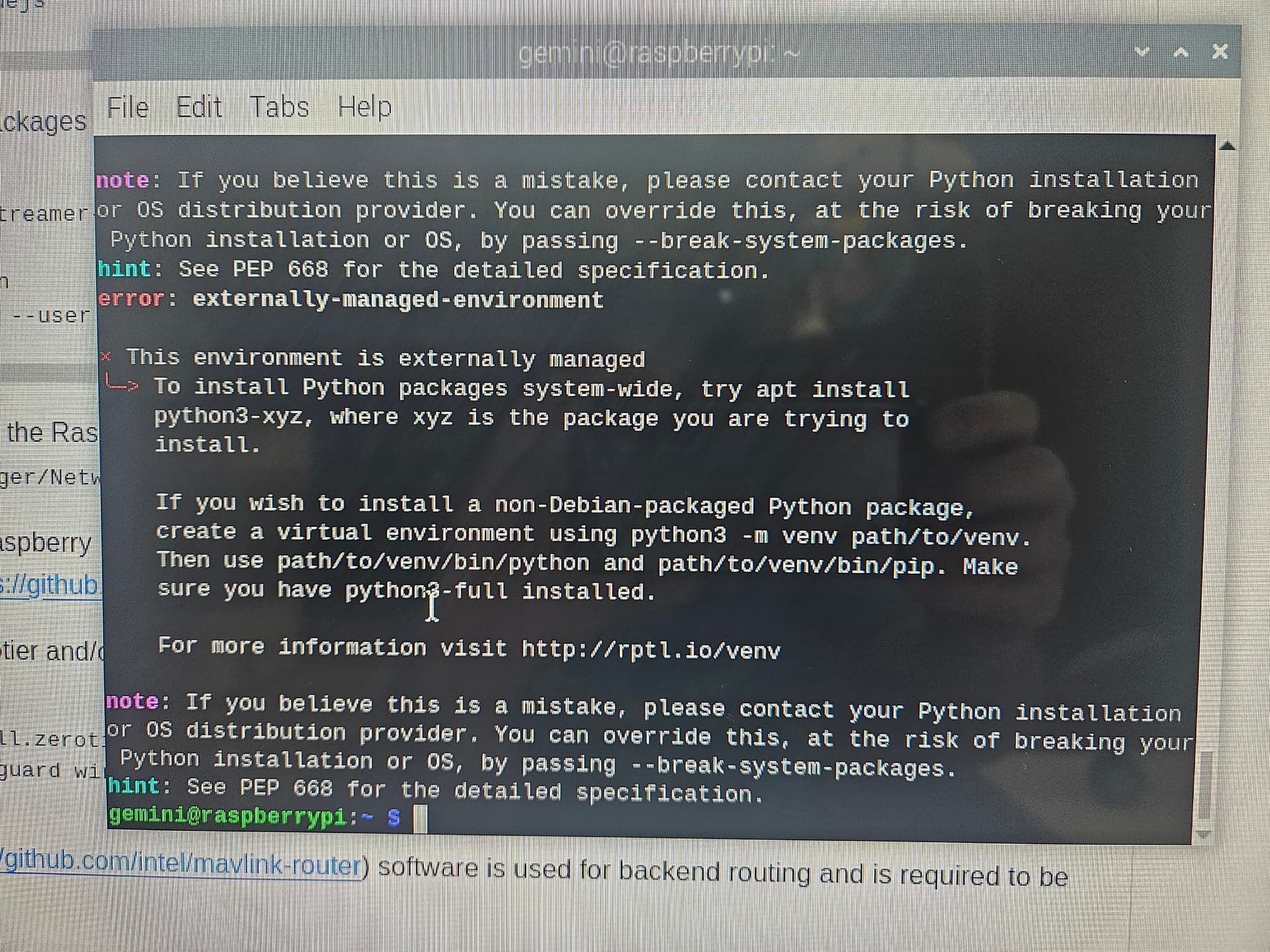
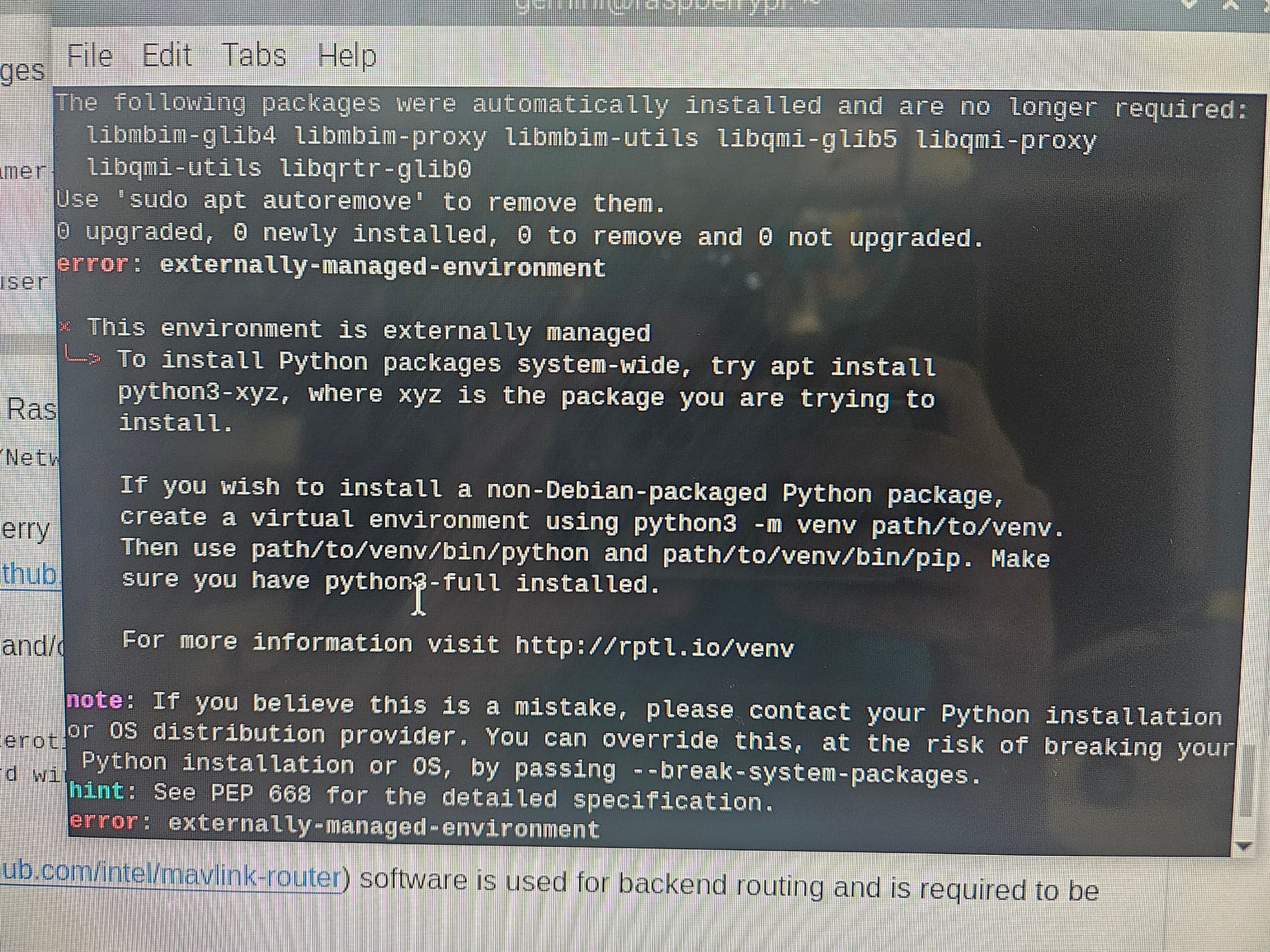
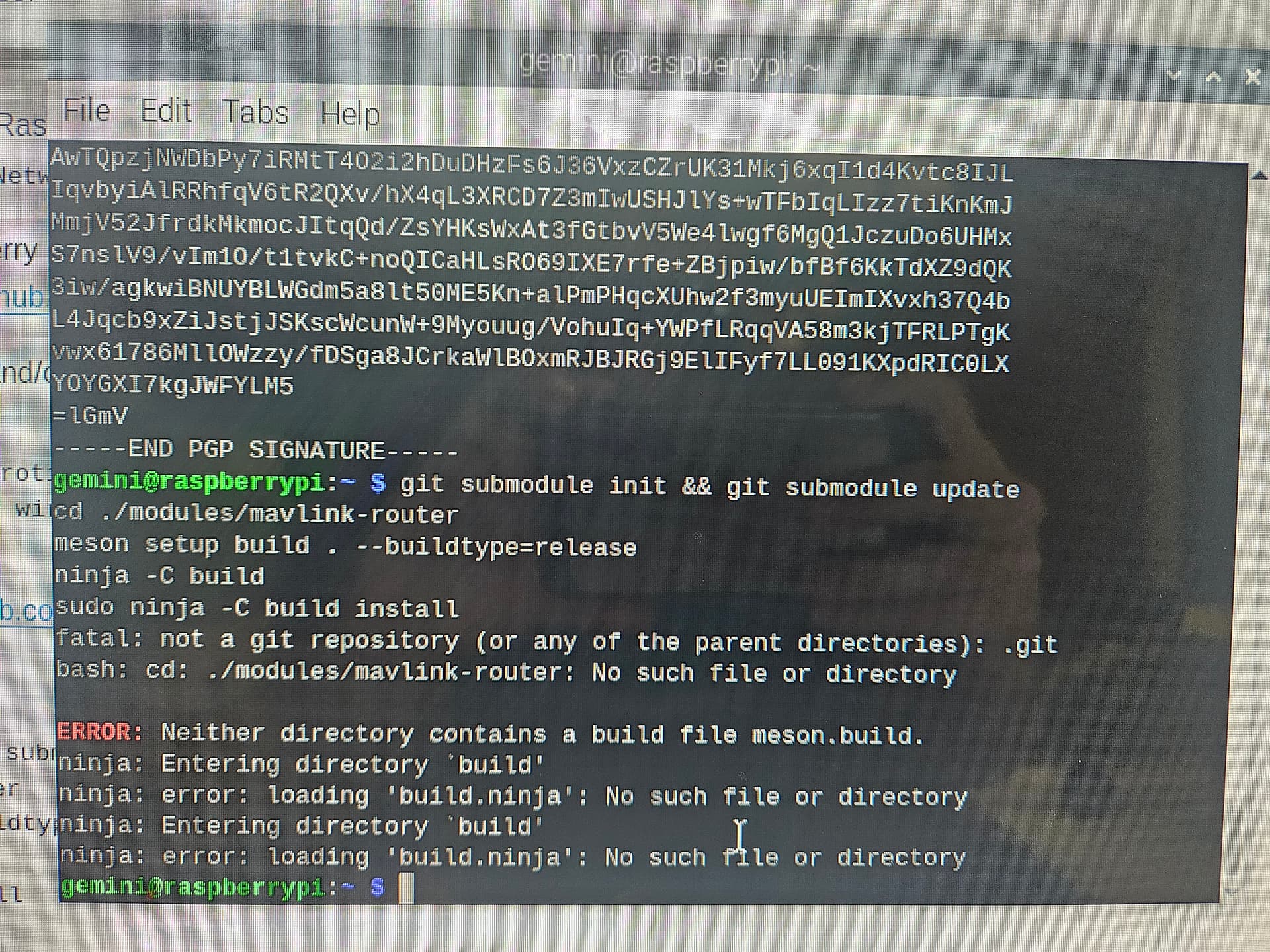
I gave up on that and moved to drone engage but i keep getting issues with that in terminal. Its saying that no such directory exists. Im sure that a simple thing with syntax.
Keep getting errors during the instructions. I must admit that i am pretty new to Raspberry PI and I am using a desktop version of Raspberry OS to configure everything.
If anyone could give me a hand it would be greatly appreciated. @stephendade @tropappar @Karl_S
What id like to do is try all the different approaches and see which one works best for me in my area but i haven’t gotten any of them successfully setup.
It appears you’re using the manual installation steps. I’d highly recommend you use the automatic installer (GitHub - stephendade/Rpanion-server: Web-based configurator for companion computers of MAVLink vehicles) instead.
In any case, I’ve updated the manual installation steps to fix your above issues.
Thanks for your response. Ill take a look.
FYI So i downloaded that very file, extracted it and have burned it to an SD card, and it refuses to boot… thats why ive been trying to install from source. Everything seemed to go fine when burning with imager. Maybe ill format the card and try again.
I’m a bit unsure about what you’re doing. From the linked documentation, you need to burn a Raspberry Pi OS image to the SD card, boot the Pi and then go through the automatic install instructions.
To clarify:
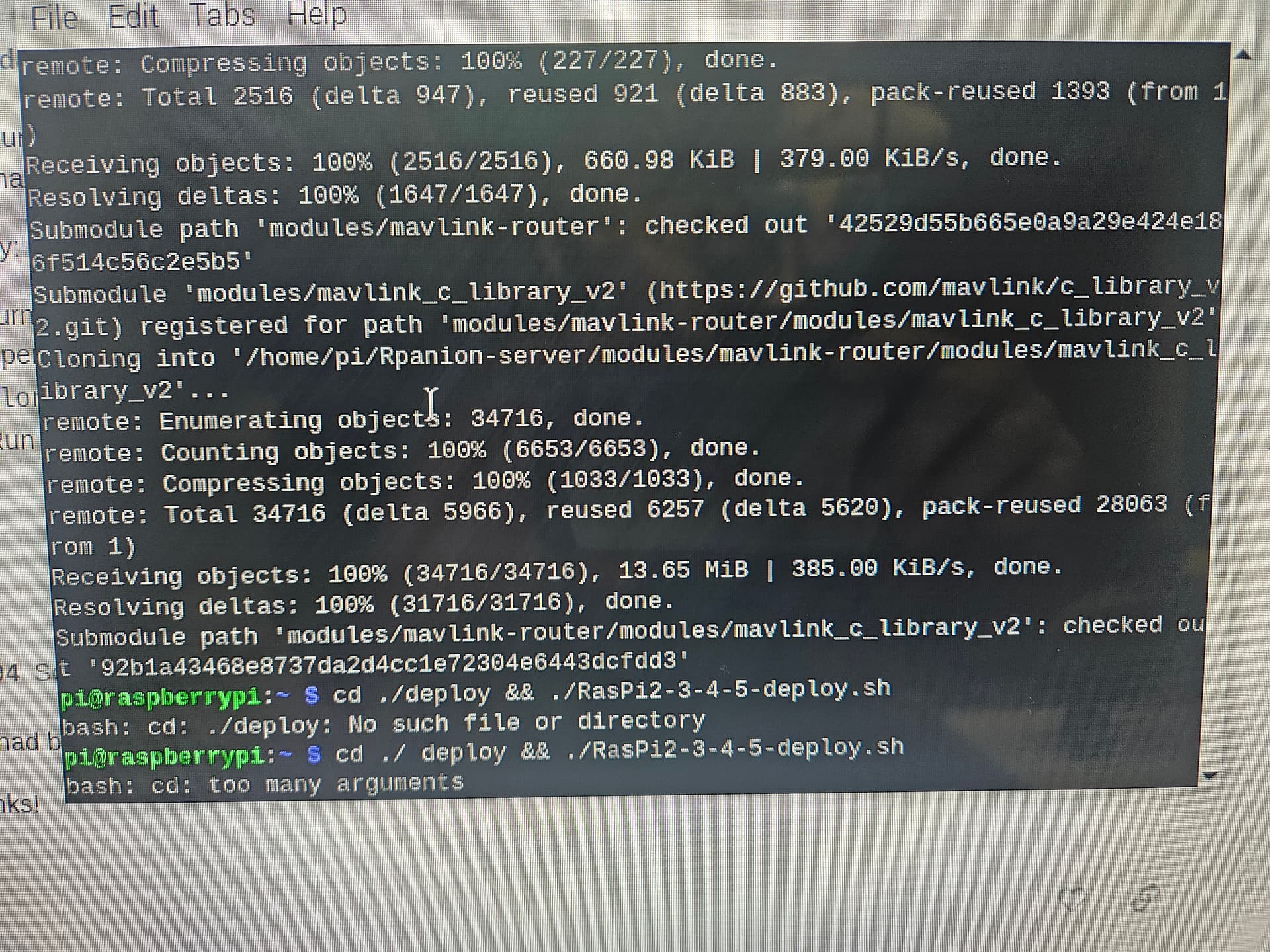
cd ~/ && git clone --recursive https://github.com/stephendade/Rpanion-server.gitcd Rpanion-server/deploy && ./RasPi2-3-4-5-deploy.shOk i had been using an existing Rpi OS. I will follow these steps exactly amd get back to you shortly.
Thanks!
Also I tried the other route of Formatting an SD FAT32 w/ Imager , then burned the Rpanion Server on to that same SD card and the boot sequence kept loopingbfrom SD slot to USB (error unable to read partition)
Disregard. I got it. Had to CD to Rpanion-server then do the second command. I feel like such a noob…