No. I’m using Asus AC56 USB wifi adapter for data transmision and this module has 2 antennas. Using the internal MS156 connector you can use the second one. It has 2 because it allows to use STBC (Space–time block coding) and LDPC ( Low density parity check) for increased range.
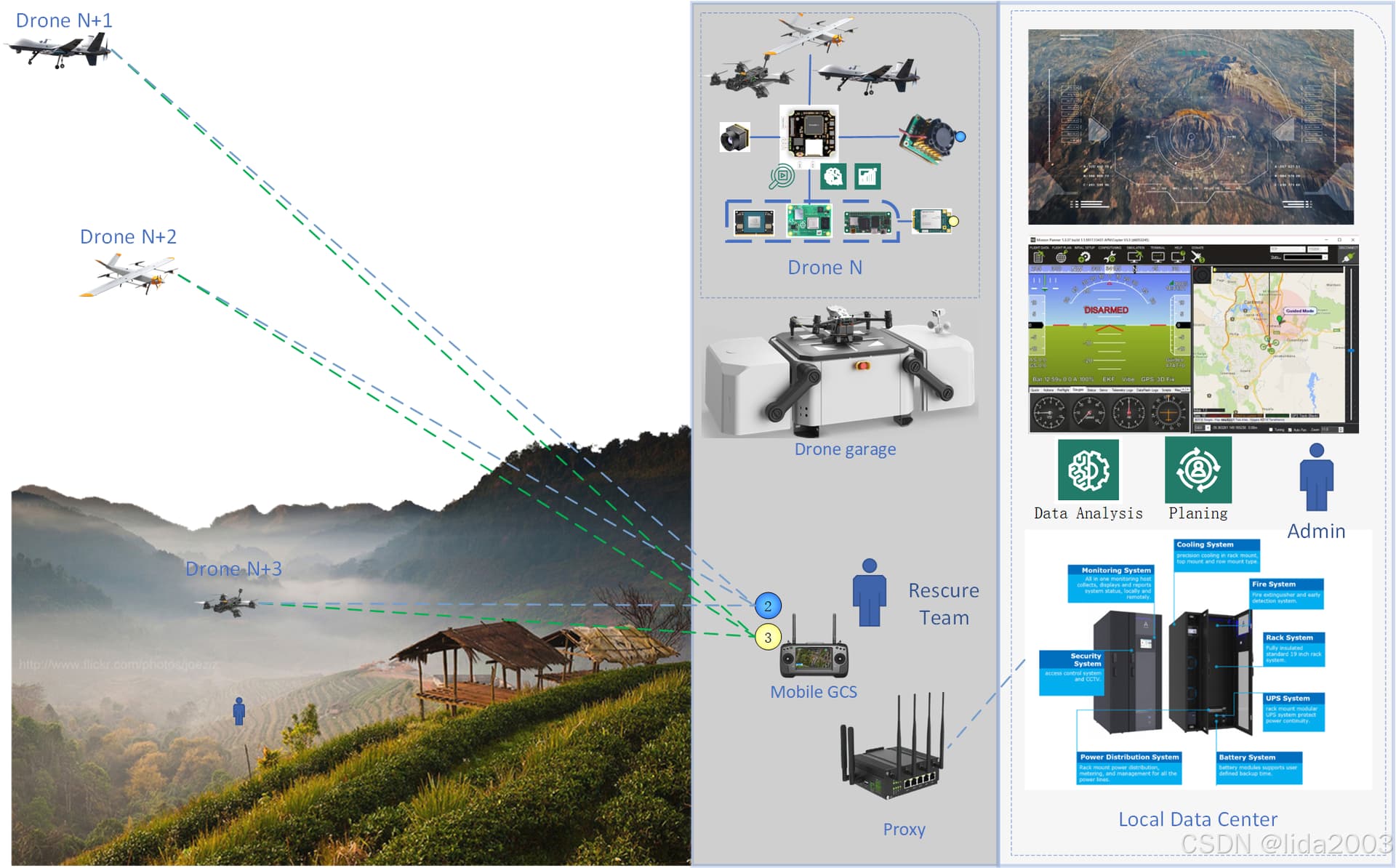
Rapid Response UAV network for Disaster Relief and Survivor Location using Machine Learning and GPS.
OK.
I’m just curious about the data link:
- FPV camera(Arducam 64MP Hawkeye) ==> MIPI ==> Pi ??? ==> OpenHD(wifibroadcast) ==> Asus AC56 USB wifi adapter ==>GCS
- Gimbal camera(IP security camera) ==> IP ==> Pi ??? ===> OpenHD(wifibroadcast)==> Asus AC56 USB wifi adapter ==>GCS
How do you connect Gimbal camera to GCS?
If two video streaming share the same usb wifi adapter, the bandwidth will be twice. Will this kind of configuration affect the range of the transmission?
Hi @cxtr,
Thanks for the blog post. Any chance you could add a picture right at the top? Normally it’s best to add a picture to make it more attractive when viewed from ardupilot.org
Both cameras are connected to single RPI4B. IP Camera via Ethernet and Arducam 64MP Hawkeye via CSI. RPI4B is connected to the Flight Controler for bidirectional telemetry transmision and uses the Asus AC56 to transmit and receive from ground. Gimbal Storm32 controller is connected to the Flight Controler via serial using Mavlink V2. As the FC has telemetry with ground you can control the gimbal.
1 Like
Unfortunately the project is still in its planning phase, but the moment I have a picture I will post it at the top.
And it is a good idea to update the first post as you go along, so that users do not need to read the entire thread. More work for you, but a lot less work for the multiple users.
Hi @cxtr,
Really any picture is fine so I’ve taken the initiative to take an image out of the pdf and put it at the top of the blog post.
UPDATE!!:
Some of our sponsored parts have been received from NewBeeDrone! Frame has been built, AP has been flashed, fc and esc have been soldered, and bluejay has been flashed to all four.
Currently working on calibrating FC and compass. The next step will be getting the Caddx Vista up and running with the goggles Integra.
We can do it together.
Im a phd. student. My thesis is rapid survivor detection after disasters by using robots
If you would like to work together, send me your email.