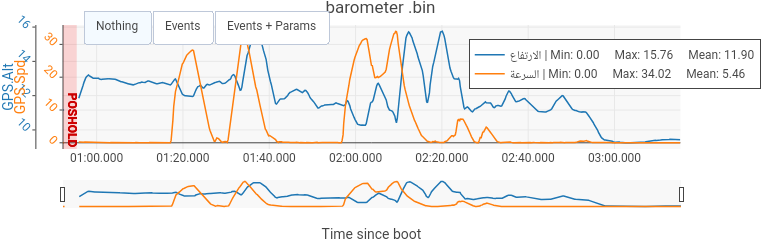
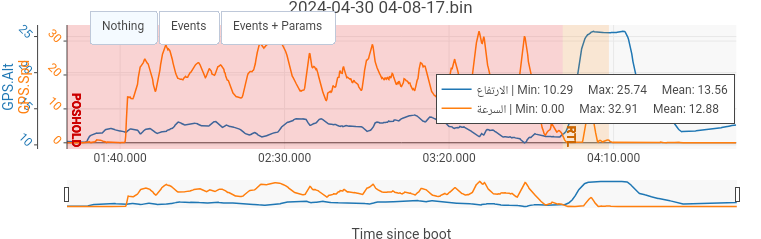
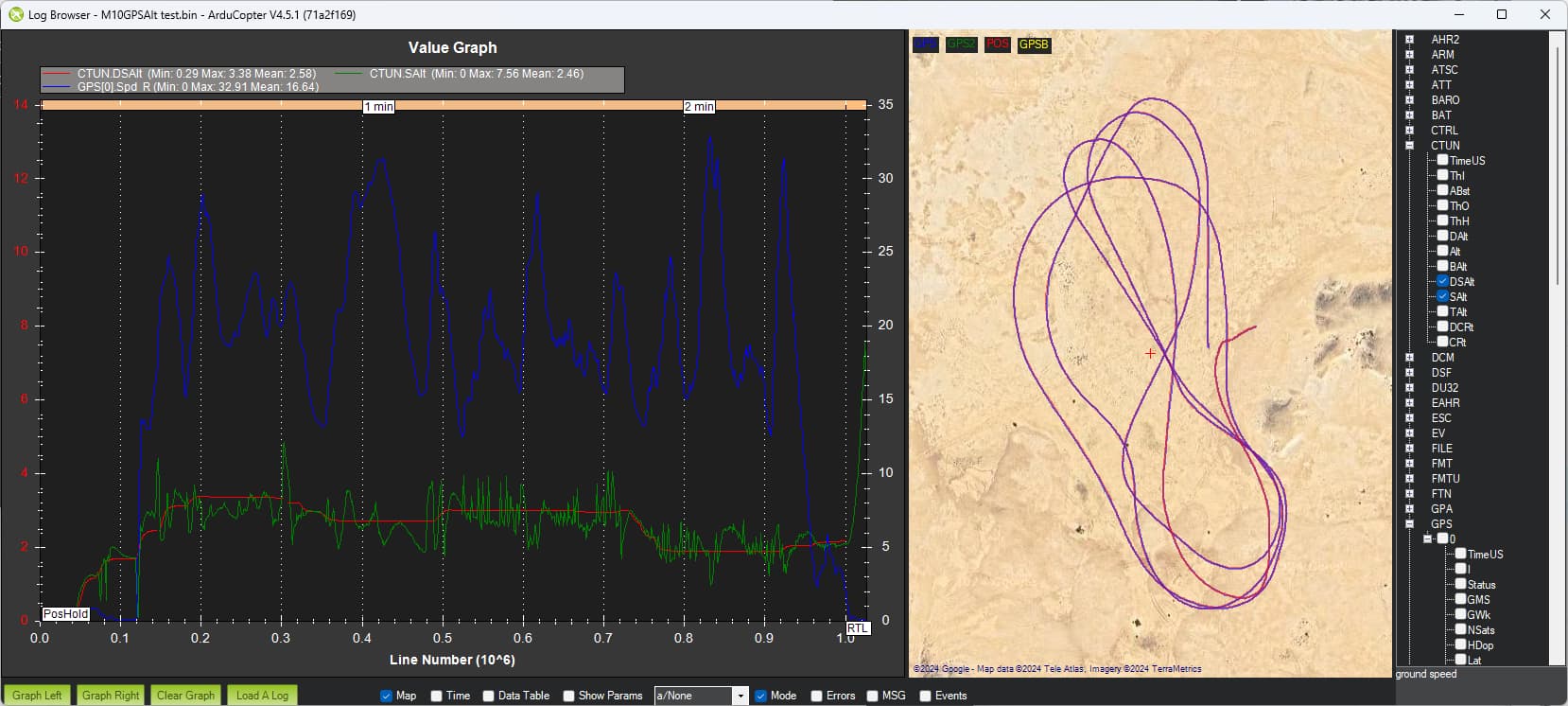
Hi just share with you latest test low Altitude flight with mateksys M10Q GPS reaching speed 117kmh and altitude slight change if we use RTK it should be better.
1 Like
Hi @edfeeoc,
Thanks for the log. That’s looking pretty good considering the speed.
So you’ve switched EK3_SRC1_POSZ=3 (GPS) so it’s using GPS for altitude which seems to be working fine and the vehicle is staying within about a meter of the target altitude above terrain which seems pretty good so well done!
1 Like
Yes many thanks the results is very good visually except as you mentioned one meter error if I switch to RTK Ublox F9P do you think the Altitude precision maybe increase?
1 Like
It’s hard to say if switching to an F9P will make enough of a difference to be noticeable. It will certainly be better but how much better is hard to know.
2 Likes
@Rajesh_Reddy I was investigating this issue and just tried the NoopLoop P on my Copter and I could not reproduce the problem.
I had a another look at your log. It looks like you are using Copter 4.3.7, whereas we introduced this sensor in Copter 4.5. Is this a custom firmware? In that case is this even a NoopLoop P or some other sensor with a custom driver that you wrote?
I also had a look at your SERIALx_PROTOCOL list, which does not seem to enable a serial rangefinder. So this looks to me like its some other RangeFinder.
1 Like
hello,My problem has not been solved, set SURFTRAK_MODE 0, because I do not want to gain altitude indoors, but I use pitch/roll, the copter will land slowly on the ground, can you give me some useful advice
Set EK3_SRC1_VELXY = GPS,EK3_SRC2_VELXY = OPTICALFLOW,EK3_SRC1_POSZ = BARO,EK3_SRC2_POSZ = BARO, indoors, I use RC8 = EKF POS Source LOW, I use pitch/roll, copter to maintain a steady height while I switch EKF POS Source middle, use pitch/roll, copter height slowly down to the ground, I wonder why different PV_AidingMode will affect the height? Height source is the barometer, is it the EKF fusion or the rangefinder
Hi @angleman,
Have you posted an onboard log somewhere? Maybe it would be best to create a new topic?
I see reports above from edfeeoc and Rajesh Reddy but at first glance your report seems to be unrelated.
Using an optical flow EKF source with SURFTRAK-MODE set to 0, the swinging attitude joystick Copter will drop to the ground I see his problems as similar to mine
All in althold mode test and use optical flow in poshold mode also like this
Thanks @rmackay9 @rishabsingh3003 for looking into the problem.
Yes, this is custom firmware The sensor I am using is UAVH30 radar.
Can you post logs of all your tests?
Its tougher to help with a custom firmware. Do you have the code published somewhere?
@rishabsingh3003 Our company brought the custom firmware for certification purposes. I have requested them to share the code with us.
Uploading: 8.bin… This is the log I tested again today, when I switched SRC1/SRC2, I could see that the drone was descending rapidly according to the rangefinder I installed and could not maintain altitude in althold mode
Hello, I would like to know if this phenomenon is caused by my parameter Settings? I focused on the latest list of questions and didn’t mention mine. Maybe I was too quick
Hi @Rajesh_Reddy,
Maybe you could re-test with the standard firmware? I think that would be best, I don’t think the AP core devs can really take responsibility for non-standard firmware.
@rmackay9 Thanks for the input. From people whom we brought the firmware said they are looking into the problem.
1 Like