If one were to build a new vtol today what’s one of the more recommended platforms? I have a new Matek H743-Wing V3 FC in my parts box and am looking for a summer project.
Thanks!
@tridge
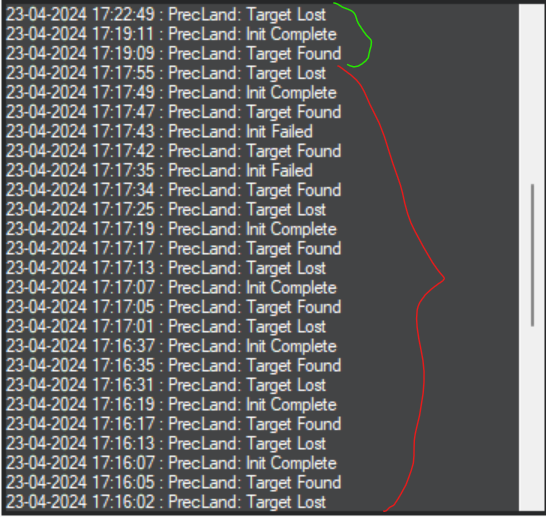
I’m currently testing precision landing in SITL, trying to send landing targets using both MAVLink 1 and MAVLink 2 commands.
With MAVLink 2, Mission Planner gets ‘Target found’ and ‘Init Complete’ messages, keeps detecting until I stop.
However, when using MAVLink version 1, I consistently receive ‘Target Lost’ messages despite continuous command input. It intermittently reinitializes and fails again, sometimes it fails in initialization.
I’m seeking clarification on whether there are any limitations when using MAVLink 1 command.
@pramod it depends what frame you are sending. If sending MAV_FRAME_BODY_FRD then it needs some fields which are MAVLink2 extensions, so won’t work.
What example message fields are you sending?
Excuse me
I would like to ask the following questions
-
Does this Quadplane precision landing function support PIXY IRLOCK camera? Because I set it according to the website (Precision Landing and Loiter — Copter documentation), but did not get the expected effect.
And you need to change PLND_BUS to 3 to make the PL.Heal display value in the bin file be 1. The reason why it is set to 3 is the reference website (https://discuss.ardupilot.org/t/pixhawk-4-with-irlock- no -communication/44290/5), but other records of PL in the bin file have no value.
*My PIXY IRLOCK camera is normal, and it can work normally with Arducopter -
I checked the contents of the bin file that successfully executed Quadplane precision landing. I found that its parameter PLND_TYPE uses MavLink1 as the communication protocol, so I guess whether the PIXY IRLOCK camera is not yet supported.
I would like to ask if the camera device used is XBLink Plus?
If not, which model of camera is it? -
I did enable the lua script, but the format information of PPLD has not appeared in the bin file. Is it because I don’t know where the PIXY IRLOCK camera is located?
My bin file URL:356 1980-1-1 上午 08-00-00.bin - Google Drive
Excuse me
I would like to ask if the camera device used is XBLink Plus?
If not, which model of camera is it?