Hey Greg…glad you got the truck issue resolved. What a mission! Sorry you’ve had some struggles buddy. I as well had to revert back 3.7.1 due to several issues using 3.8 beta 6 (complete loss of my rfd900+ connection for example along with PID issues). Good luck on your upcoming test flight using 3.6. I remember your initial videos, particularly transition flight, seemed to work very well despite the stall at the end. Best success!
I’ll be flying mine on Saturday and testing horizontal flight as well. Fingers crossed!
I have found that when using APM for a normal airplane (no quadplane), MANUAL mode is best for initial flight testing and then use FBWA and LOITER, etc. For emergencies, changing back to MANUAL mode is a good bailout strategy.
When testing a QuadCopter, I now use QSTABILIZE as my bailout mode if something goes wrong during the flight. This is consistent with my other non-APM VTOLs (FireFLY6, V-Hawk, CL-84) in which HOVER mode is the bailout of choice.
If I had not switched to MANUAL mode when my Ranger EX stalled on the first FBWA test, then I would have landed much smoother. In summary, go over your bailout strategy before each flight.
Thanks Greg for the tips. I’ll keep my fingers crossed. Looking forward to seeing your latest video update. I think at the end, it’s probably a good idea to downgrade with what we know properly worked and go from there.
My re-test of the Ranger EX QuadPlane using v3.6.0 firmware eliminated the pitch up issue of v3.8.0 but showed the same wing drop or stalling issue previously seen. The video below contains a great save by switching back to QSTABILIZE mode!
I think the stock Ranger EX power system does not provide sufficient thrust (even on 4s) to overcome the added weight and drag of the QuadPlane components. The lighter Bix3 QuadPlane did not have this issue using the same v3.6.0 firmware.
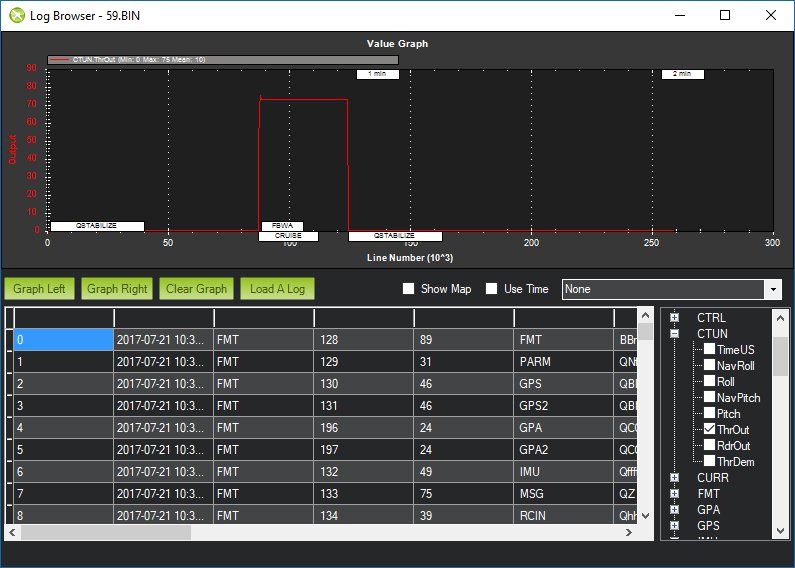
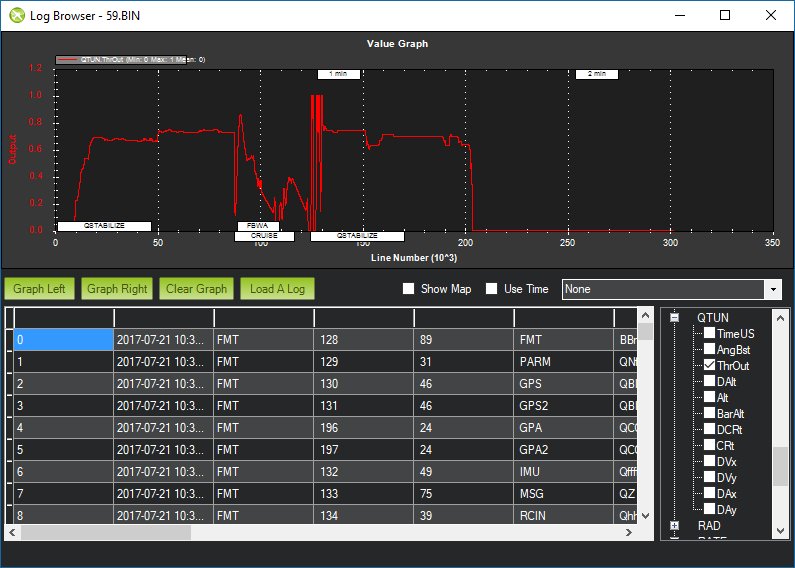
The wind was relatively light yesterday. The airspeed graph below shows that in QSTABILIZE mode the air speed sensor output was higher against the wind during take-off and lower with the wind when coming home after the save.
@GregCovey amazing save! Talk about by the skin of your teeth. Great job on the recovery. Since you are back to 3.6 I’m curious why you are still experiencing the same issue with 3.8. Can it be more of a weight or CG issue considering the last flight you had in 3.6 you were able to make a successful transition? I appreciate you sharing and posting your progress. Would you consider maybe doing a fresh FW install to 3.7.1?
It did make a successful transition to FBWA in v3.6.0, unlike v3.8.0 which immediately pitched up. The issue is what is going on after it is flying. You can can see an initial disturbance after transitioning to FBWA but it recovered to fly further until it stalled or went nuts.
I’m looking for answers to these questions below.
Is it stalling?
Do I need more forward thrust to keep it flying?
Is the Q_ASSIST_SPEED causing instability when the quad rotors initiate?
Another guy using the PX4 stack on a Ranger EX QuadPlane claims that the stock power system is more than adequate using a 4s Lipo. Both throttle logs show about 75% in either mode but I have to agree that the forward motor didn’t sound like it. Perhaps this is the reason it is never getting to flying speed.
@GregCovey since I’m also building a quad ranger I’ve been noticing something that may be leading to your issues. Even in your video, you can see a significant level of torsion in the foam wings. I wonder if this twist is contributing to the destabilization you are experiencing? Would it be prudent to introduce an additional cf reinforcement in the wing to control the torsion?
Hi Greg
I think you might ave a structural problem. Looking at your video at the 10 second mark there seems that there is massive wing torsion going on from the torque produced by the differential lift from the quad motors plus the leverage from the booms. The wings can’t handle the forces at all by the looks of it and are twisting about 10-15 degrees.
It’s possible that the quad motors are trying to assist with a pitch up on transition which is causing the main wings to warp, pitch up and then stall. I’m not sure how you can fix it. Since our first QP conversion with that setup I’ve never been a fan of having the quad arms on the wings because of this, as well as the fact the wings, and not the fuselage ae taking all of the quad loads. A h-quad layout means the quad arms can be allowed to flex as this produces yaw without loss of roll/pitch control because the arms are mounted across the frame instead. If you do try it again I’d do it from at least 2-3 mistakes high, so at least 3-4 times higher than in your last video. The air is soft the ground is not! That was close!
Yes, for my Test Flight #3, I reverted back to v3.6.0 to make sure the issue was not the added speed sensor. Although it repeated the same issue as in Test Flight #1 (also using v3.6.0), it did not exhibit the immediate “pitch up” issue from V3.8.0 in Test Flight #2.
Lol Alexander, we wrote the same thing. I really think that’s the problem!
It’s compounded in forward flight in that during the transition there’s lift on the wing as well.
The easy test would be to place a camera facing along the wing and then fly around in hover and yaw and climb at WOT.
I think you guys may have nailed it! I took a snapshot of the video below. I can certainly believe a structural issue on this larger Ranger EX frame when compared to the Bix3…thanks!
NP Greg.
I just saw your post now and watched the video, and said to myself, wait a minute that doesn’t look right!
The picture confirms it 100%. I’d try mounting the boom across the fuselage, they don’t have to be that wide btw. but that would completely get rid of the problem. Most wings, especially foam ones aren’t designed to take torsional moments.
Greg one other thing. Looking at it from the side in the last video it looks like you quad arms are too long in front of the wing. Do the quad and plane COG/COL match at all? The lever of the longer front arm means the loads between the motors aren’t balanced across the wing, so any quad lift will cause the wing to twist. To me it looks like the center of the arms is well forward of the plane COG. I’m not sure exactly where the Ranger CoG is though. I’d definitely check that. A QP will fly in quad mode even if the COG/COL is out.
Also your quad arms are quite far apart, you could try moving them much closer to the fuselage in as this should reduce the twisting. You can actually put them about 1.5 times the prop diameter from the fuselage. We do this all the time, typically QP don’t have any roll authority problems so moving them in is fine. Just test it carefully in hover to see if there’ any roll control issues before transitioning. It might need to be re-tuned as well.
Thank´s Greg for share all your unvaluable experiences; perhaps it´s usefull too reinforcing wings with CF cloth as I did with my flying wing First Phantom FX 61 VTOL but enlarge them up to fuselaje, that´s looks to give more rigid to the wings too. After your videos and Iskees advertise I´m waiting new motors before try to fly, good quad looks mandatory not to crash . Anxious to give a try .
@JeffBloggs I guess great minds think alike! Lol. That is exactly what the issue issue after further evaluating. Taking it further, I’ve also tried building an Octa quadplane out of the ranger but noticed there is a significant amount of torsion (impossible to even maneuver properly in hover mode). I as well have my booms under the main wings. Seems we are going to have to find an alternative. That’s why I was thinking of an additional cf reinforcement to address the torsion. Another idea would be to maybe encase the wings with some type of fiber glass? This way we significantly increase the strength and ability to resist torsion forces. Thoughts?
Jeff,
The quad arms are placed to maintain CG with the standard wing. I try to design my QuadPlanes so that I can easily change to a spare normal wing and use APM Plane when a landing strip is available.
I think I will try some struts, first only on the back quad motors to the fuselage and then near the front quad motors, only if needed. In this manner, I can still easily connect/disconnect the QuadPlane wing or use the normal wing.



 . Anxious to give a try .
. Anxious to give a try .