hello guys i was flying a quadcopter with pixhawk 2.4.8 i was in loiter mode when i switched to altitude mode soon after few seconds it go crashed and here is the log file 2023-09-05 13-04-00.bin - Google Drive
i hope anyone can give me the solution Thanks in advance
Hi Ajay,
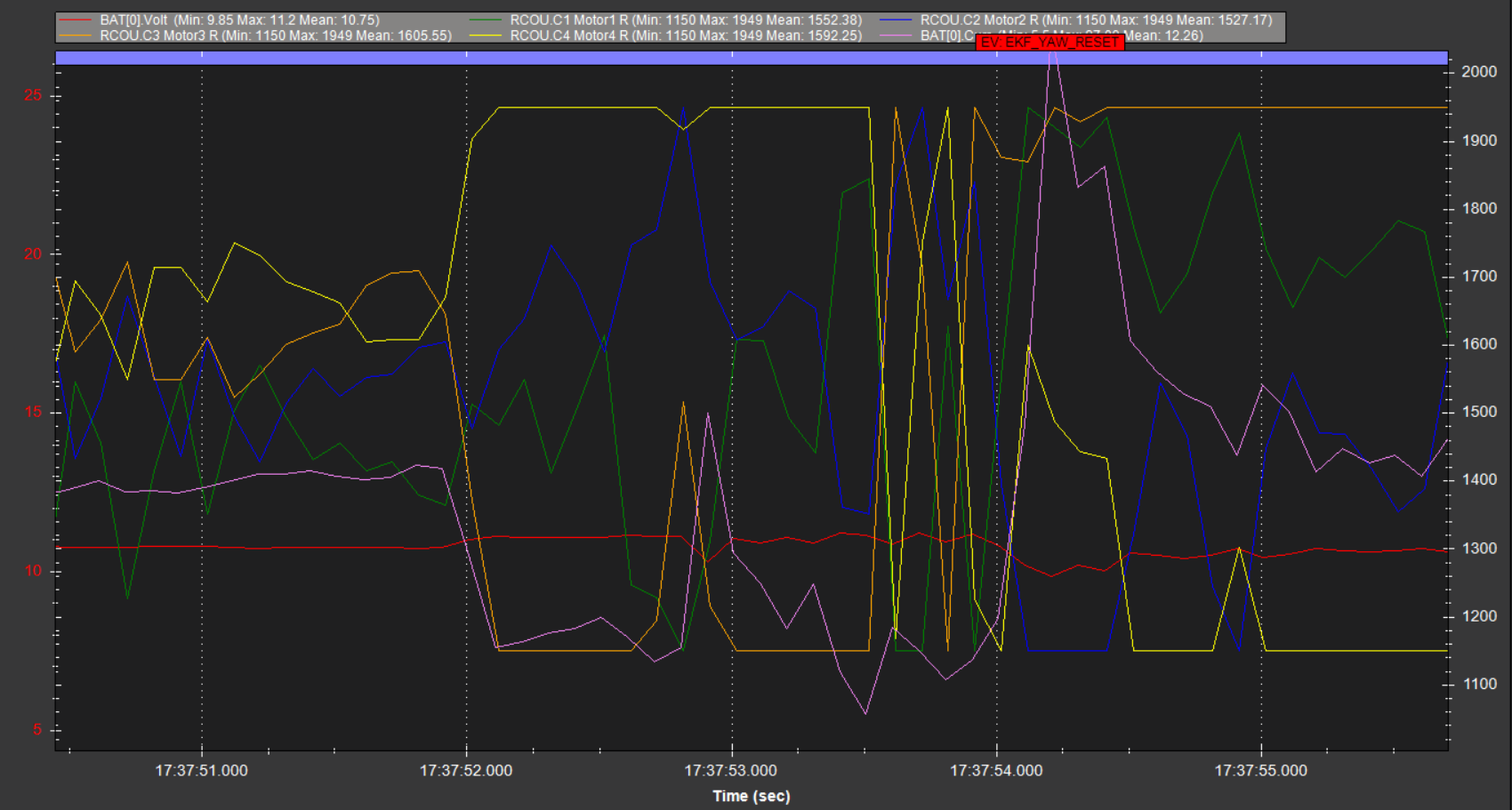
This graph is a bit busy, but what it’s showing is Motor 4 loses sync, in fact the ESC 4 shuts down due to low voltage. You can see at the same time voltage rises a fraction and current drops accordingly, confirming the previous statements.
Since the voltage is now up over the low voltage threshold of the ESC it activates again, and before the copter can regain stability, voltage drops again, and this time Motor 3/ESC3 shuts down. Before anything can recover again, the ground has risen up to meet the copter.
What you need to do is disable the low voltage cutoff in your ESCs, but dont stop there.
Set these battery failsafe levels and actions exactly
BATT_ARM_VOLT,11.00
BATT_CRT_VOLT,10.50
BATT_LOW_VOLT,10.80
BATT_FS_CRT_ACT,1
BATT_FS_LOW_ACT,3
MOT_BAT_VOLT_MAX,12.60
MOT_BAT_VOLT_MIN,9.90
Now if you get battery failsafes sooner than what you expect DO NOT changes any of these values - investigate why the voltage is going low so soon, and probably replace your battery. Sometimes cheap chargers are a problem too.
Also set these:
INS_ACCEL_FILTER,10
INS_HNTCH_ENABLE,1
INS_LOG_BAT_MASK,1
INS_LOG_BAT_OPT,4
and gather another log after making all those changes
You explain too little about the hardware and firmware used. Please do provide some more information.
@xfacta @amilcarlucasI’m also looking for the cause of the crash, would you like to help me?
Find out why the VTOL crashed - ArduPlane / Plane 4.0 - ArduPilot Discourse
Hi James, please start your own thread since it could be a different problem. Maybe post in the Plane section.
EDIT: Sorry, I see that’s what you did!
Hi Shawn you said motor 4 losses sync yeah were correct esc 4 and 3 are defective i later checked that they are spinnig slow compared to other two motors and battery is little bit old i will use a new battery next time and i will change some paramters you said and without your help it was not possible tq so much have a nice day
@amilcarlucas actually it is f450 frame with arducopter 4.4.0 with 3s lipo with 1000kv bldc motor and external compass with gps stand with pixhawk 2.4.8 flight controller
and when i switched alt hold it after some times it pitched towards me with losing height resulting in crash
You posted this on the Arducopter 4.0 forum section. I corrected it to ArduCopter 4.4 now.