I have a hard crash after a few minutes in Autotune using the latest Copter 4.1.2 firmware. This is a new quadcopter setup and first test flight. Could you kindly give some suggestions of what might happen? Thank you very much!
Very sorry to hear about the crash. This should be the big guy with 12S battery. Could you please provide more information about the drone config (motor, frame size, props…)
By looking at the log, I have something to point out:
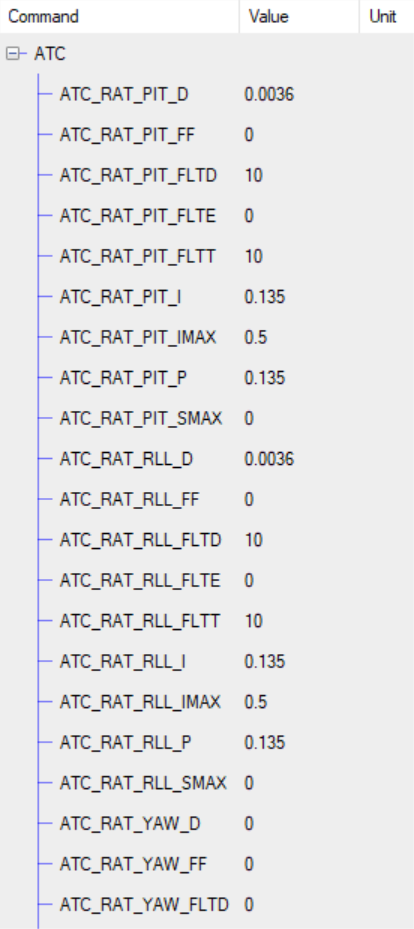
It looks to me you skipped the Manual tuning step in the Wiki. These ATC_RAT_PIT/RLL_X seems to be defautl. This is very important to follow the instruction before going to Autotune (and Loiter)
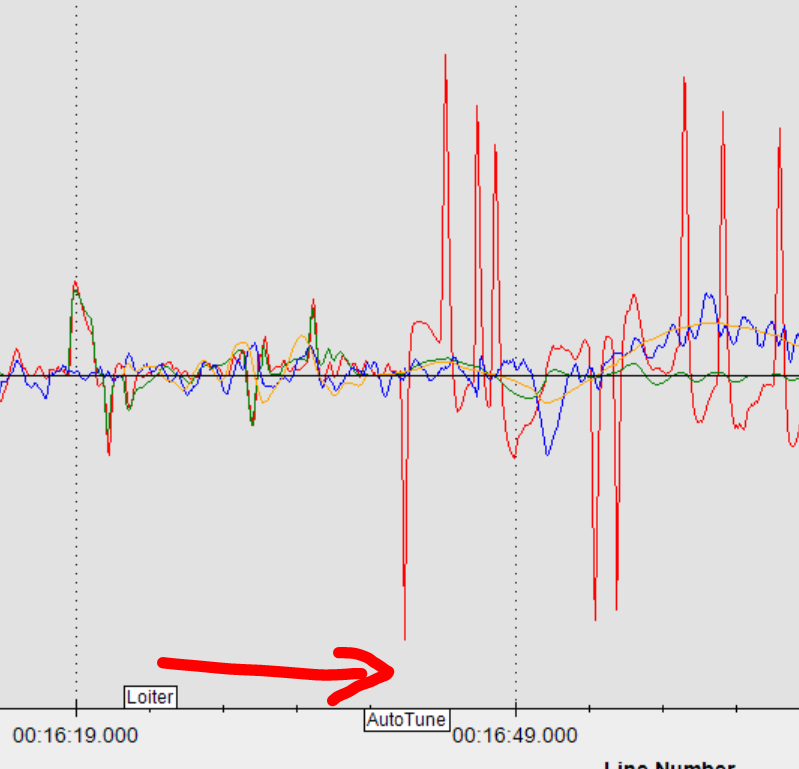
It is not the right way to invoke the Autotune from Loiter, since the attitude tuning is not done yet, Loiter (positioing mode) should not be invoked before AltHold and Stabilize are good to control. I guess you may have some difficulties in drone control but let’s try harder.
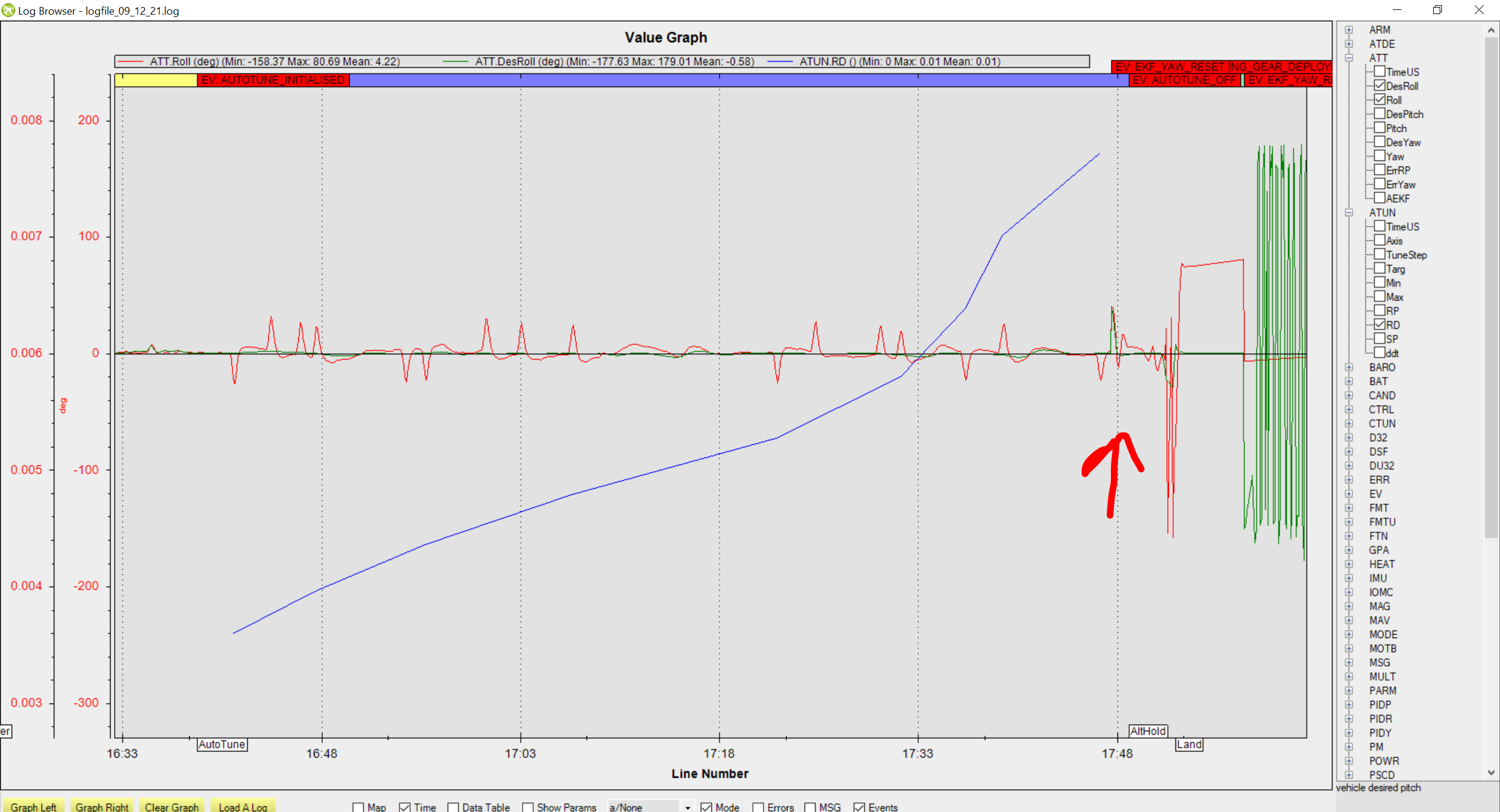
I guess the direct reason for the crash is when AutoTune increased D term (ATUN.RD), it tweaked the drone so hard and it caused oscilation/instability in the control loop so the drone can not keep up with that change because PIDs were wrong (no previous Manual tune step is done)
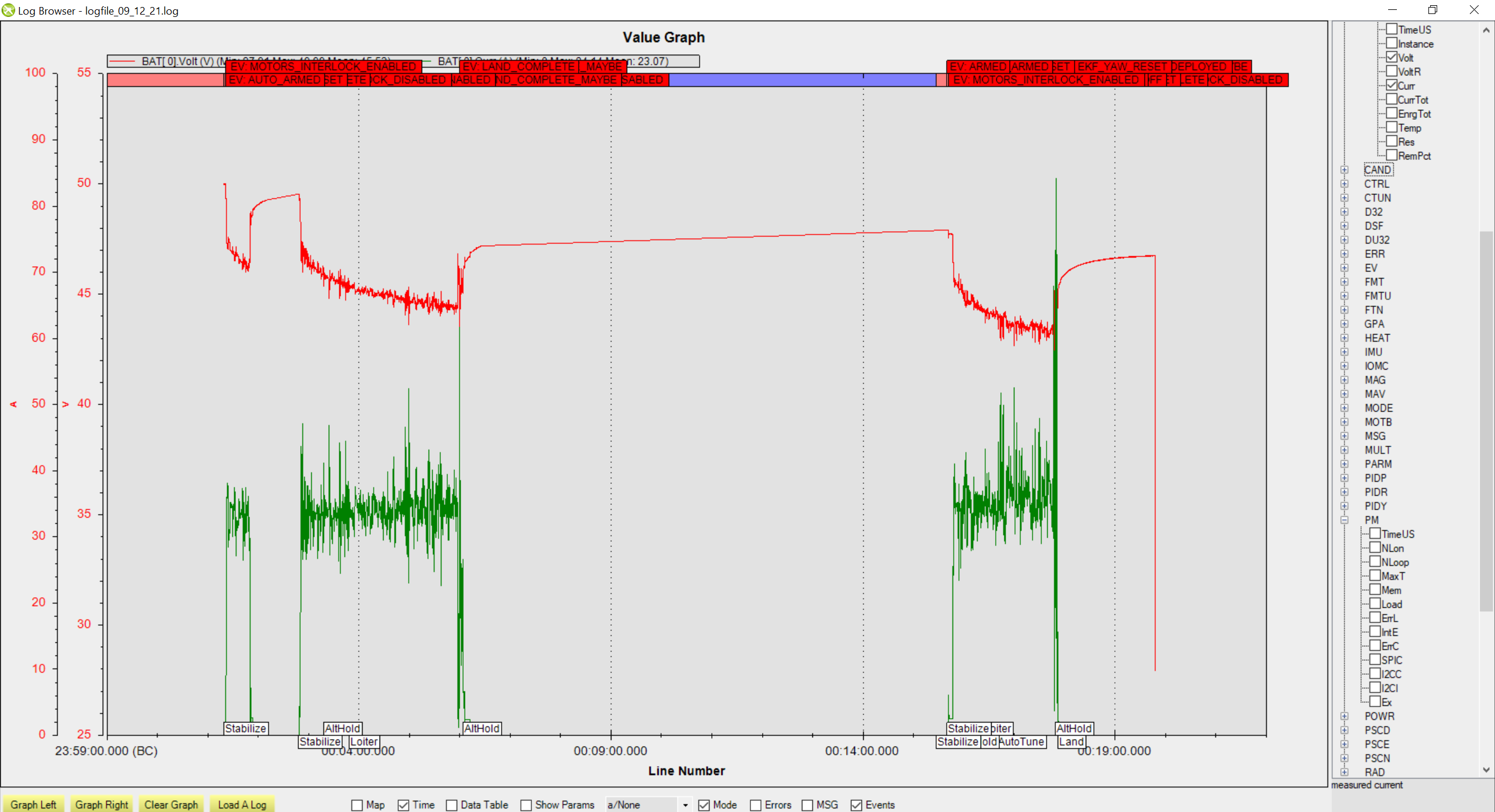
Motors did not looks good too, it is too sensitive. You can see that they bumped from min PWM and max PWM while flying. These may come from
Not calibrated ESCs
Not suitable motor, ESC, battery, propellers, weight configuration
Your MOT_x parameters seemed fine. MOT_THST_EXPO was set to 0.75, is it a reason for it (22 inch pros - I guess)? If not, please go back to default: 0.65.
About PID values: Yes I used default values for the first flight. Is there a wiki page to set up PID values before flight or you mean I should do manual tuning in the air before Autotune?
I calibrated the ESC before the flight.
Yes my copter is 21" so I set MOT_THST_EXPO to 0.75 as wiki instruction.
I saw the Auto Analysis failed in my Compass. Could it be the magnetic interference that causes failure in the compass that can cause the crash? Could you help have a look at the compass log also?
Hi @tony34,
I do not use FLAME ESCs + MN motors but another combinations from Tmotor (U8lite, P80, Alpha ESC)
Tmotor claimed they have linearizing scale for their ESCs - which I am not sure about this. However, I always set MOT_THST_EXPO 0.65 for all the cases. Somebody found that 0.2 works for their FLAME ESCs - which, again, I am not sure too.
This really surprizes me.
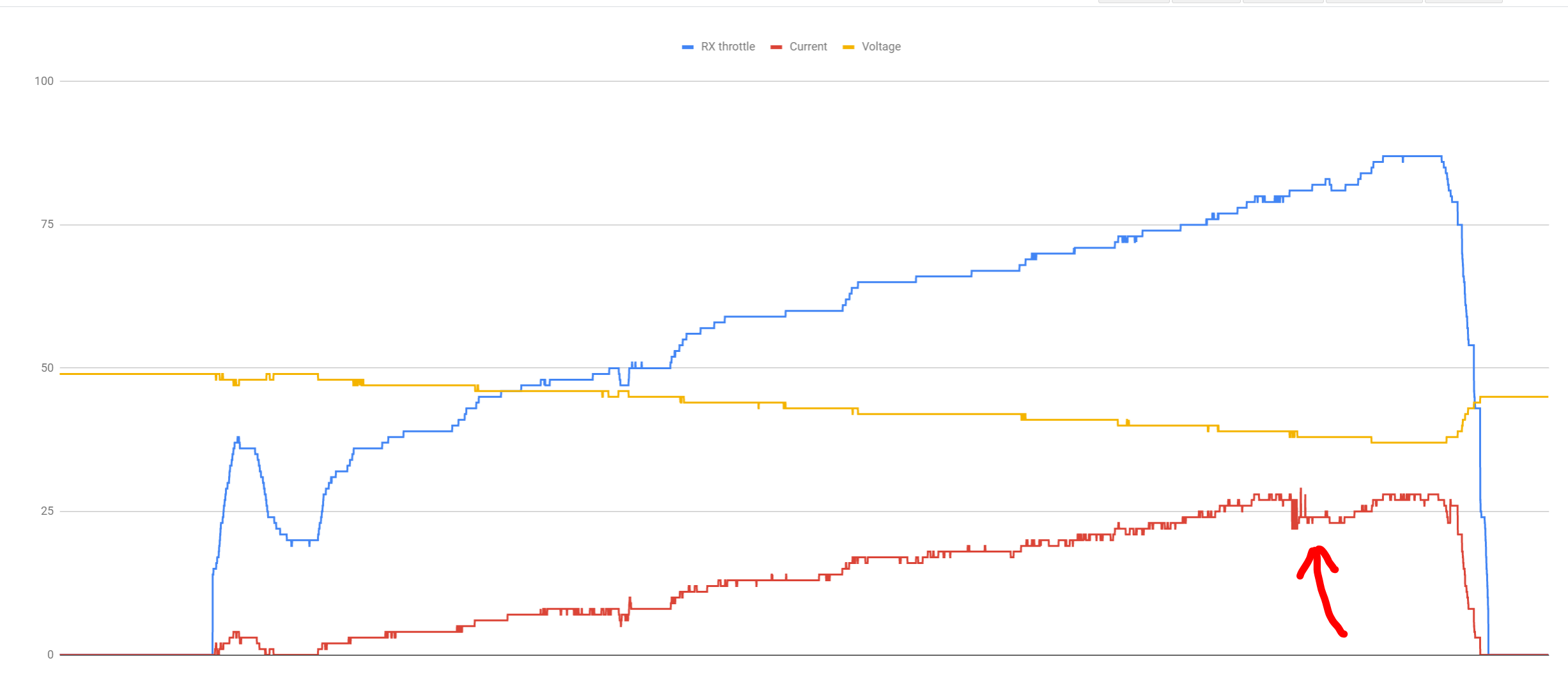
Okay, I am not trying to confuse you guys and it should be off-topic but I still want to share this test. A full test result and conclusion maybe presented in another threads.
There is always be an “anomaly” point at 79 - 80% of the throttle (approximately 1790 - 1800 RC PWM)
Let’s give it a look and think if it is relevant to previous problems (and Tmotor ESC problems) or not.