We have a problem with a quad with firmware 3.4.4 in auto mode.
When you fly a route of waypoints (does not always happen) the copter stops and stays static for a few seconds and then resume the mission.
This can be random, a few days works well, and others bad.
I leave the logs, see if anyone can help me.
Thank you
HI, We could use the flight plan file as well, or a screen shot.
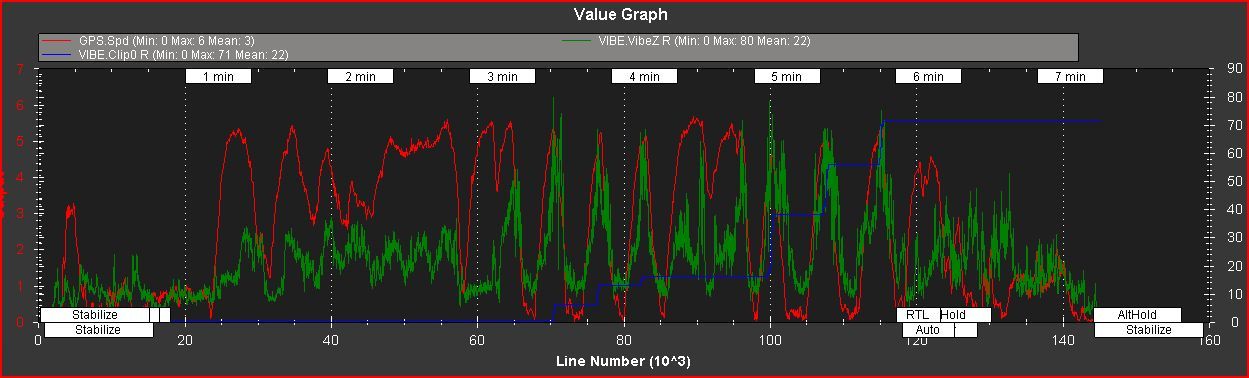
I first noticed your altitude control. The Z vibes are bad enough on the upwind leg that you lose altitude while the altitude control believes it’s climbing at 2m/s. The vibes spike at LOW throttle when the vehicle picks the nose up to stop at waypoints. Is this the intended behavior, or are these the stops you mention?
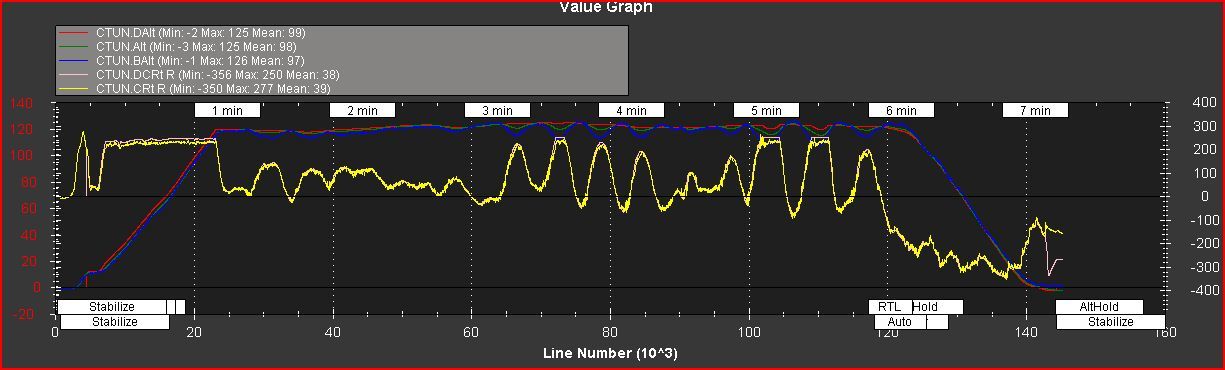
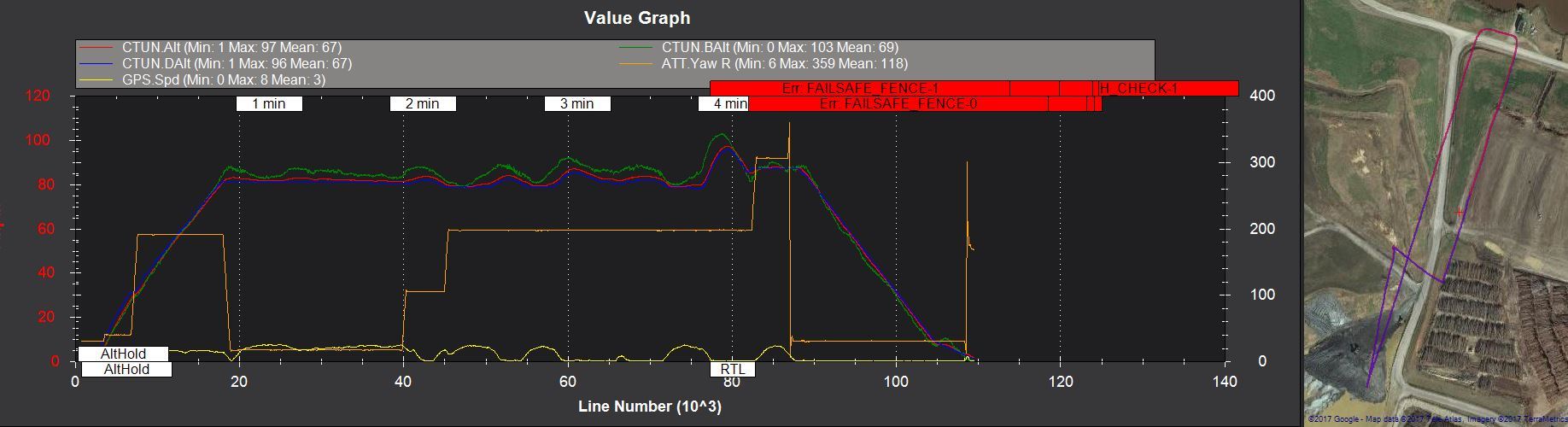
@jfield – see vibe plots and alt vs speed. copter seems to do south leg to wp1 fine, as well as 1st north line. Then problems with altitude and starts/stops on south line; then fence breach. Altitude problems are correlated with the speed fluctuations.
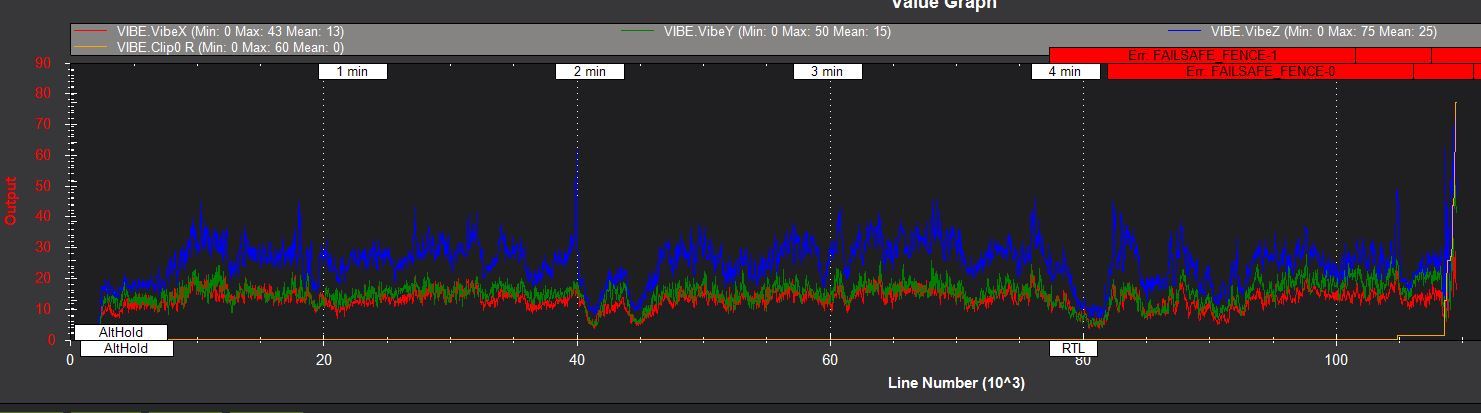
So I just plotted my own climb rate and desired climb rate telemetry (altitude control?). It doesn’t make much sense to me. It doesn’t seem well correlated with altitude changes. What would cause the altitude control to be functioning incorrectly? I see vibrations mentioned for @aliainrc’s case above, but the z-vibe level i’m showing is about normal, isn’t it?
The climb rates and altitude control discrepancy is usually Z vibes. It looks like it’s averaging about 30. Not crazy high, but maybe an issue. Your controller thought it was descending at 1.5m/s while it was climbing to fence breach! I’m not sure what else could be going on.
The stopping, or pausing… I think it’s a function of the altitude problem. I kinda remember some code that limits (scales) X and Y velocity while Z is dominating the navigation.
Thanks for that Jeffery. I have some more logs to study, with flights under different wind conditions. I think vibes go up with more/gustier wind (motors working harder). I want to make sure I can find a strong correlation between the problem (climb rate issue & start/stops) with increased vibration. I’ll post more soon I hope.