ok , I will continue to optimize the parameters of the filter. Do you have PID parameters and other parameters suggestions for adjustment?
sorry for my mistake.I will upload new logs as soon as possible.
thanks.
ok , I will continue to optimize the parameters of the filter. Do you have PID parameters and other parameters suggestions for adjustment?
sorry for my mistake.I will upload new logs as soon as possible.
thanks.
These parameters are defaulted to 4.5. What made you think that they needed to be reduced?
Now that I have looked at your log. It doesn’t appear that there are any instabilities present. Mainly just the vibrations from the rotors. Have you tracked and balanced both rotors?
Because operating the drone is too sensitive, so ang_x_p is reduced.
rotors are well tuned,Deviation controlled within 0.3 degrees.
you need to explain what you mean by the drone is too sensitive. too sensitive to your stick inputs? ATC_ANG_X_P provides feedback into the controller to reduce angle error. If the aircraft is too sensitive to stick inputs then you have to adjust settings for control shaping. ATC_INPUT_TC, ATC_RATE_X_MAX and ATC_ACCEL_X_MAX are parameters that adjust the target response shaping.
What deviation is controlled within 0.3 deg? Not sure what that means with respect to track and balance.
yes,too sensitive to my stick inputs.i misunderstand these parameters.according to you explanation.i think i should increase these parameters.because of my big size drone.
When the pitch is adjusted to 0, the angle difference between the two blades is within 0.3 degrees. I remember it seemed like h_sv_man = 3. The same is true for the maximum pitch and the minimum pitch.
Maybe I didn’t make it clear, mainly to explain that the pitch adjustment should be no problem
according to my friend’s experience in tuning helicopters.
Maybe I didn’t understand what you mean by this sentence, can you help explain?
Thanks!
I would recommend increasing the ANG_P params to 4.5 initially. When increasing the ANG_P params in pitch and roll, you’ll need to be careful as this will amplify the input to the rate controller. therefore you may want to reduce your ATC_RAT_XXX_P and ATC_RAT_XXX_D gains by 25% to ensure you don’t excite an instability. Or you could just slowly increase ANG_P using the TUNE knob. If you see instabilities develop then you will have to reduce the RAT_XXX_P and RAT_XXX_D terms and then continue to increase ANG_P.
That is great but still need to check how well they track in flight. Blade tracking is ensuring the end of one blade passes through the same path (height) of the previous blade. When you look at the blades in flight they should be passing at the same height and look like a knife.
Rotor balance is making sure the center of gravity of the rotor system is at the shaft. I do this statically by removing the rotor system from the vehicle, including the shaft. I place the shaft horizontal to the ground using a prop balancer (with enough weight on it so it doesn’t fall over due to the weight of the rotor system). then I see which blade drops. I add weight (monocote or tape) to the other blade until they balance statically.
OK,i will try.
When controlling the aircraft on hover flight.the blades are in a plane.
Do you mean to see the static balance of the blade?
No. Static balance the entire rotor system. Be sure the blades are extending straight out from the hub arm.
@bnsgeyer
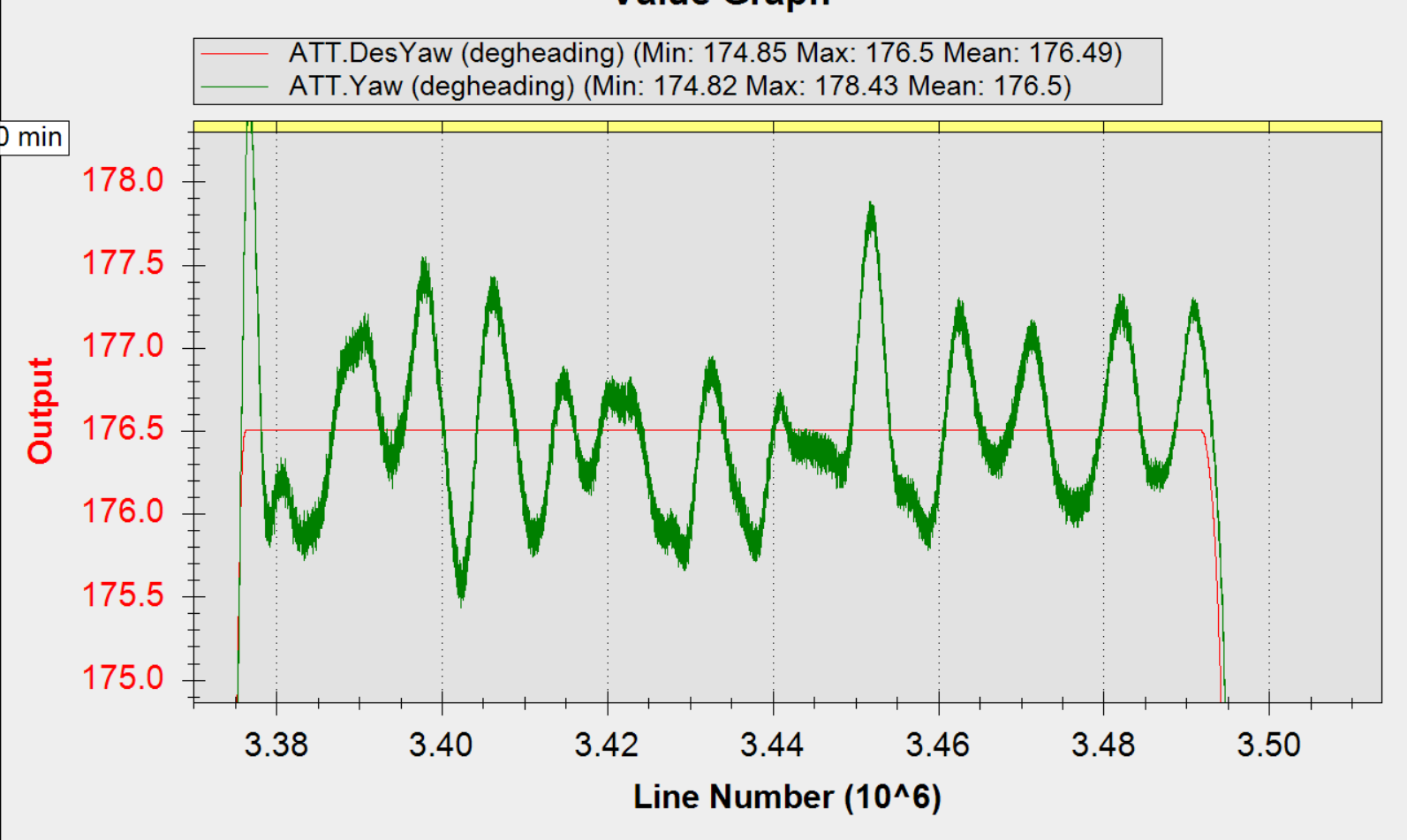
hi bill,thanks you advice.today i adjusted ANG_P.The drone flies more stable.However, in loiter mode, when adjusting the heading, the aircraft is still a little up and down.Judging from the flight effect, it feels a little overtuned and then adjusted back.As shown in the picture below.
Another problem is that when the drone is flying in loiter mode, such as flying forward, at a certain moment when the input of the joystick is stopped, the aircraft will fly forward for a short period, and then rebound a bit violently to brake. This will feel thrilling. In my understanding, this can be solved by adjusting the parameter D, right?
@moluav the settings that I’ve asked you to change were not changed to what I thought we agreed upon in previous posts. The harmonic notch parameters are not what I recommended
This is what I want these parameters to be.
INS_HNTCH_FREQ = 8.3
INS_HNTCH_BW = 10
INS_HNTCH_ATT = 30
INS_HNTCH_HMNCS = 35 (harmonics 1, 2 and 6)
It is very difficult to help you with tuning questions when the noise dominates the signal.
The braking feature of loiter is what I think you are referring to. There is a loiter braking delay parameter, a braking accel parameter and a loiter max angle parameter affect this response.
OK, i will change these parameters in the next test.
thanks,i will try to tune these parameters.
@bnsgeyer
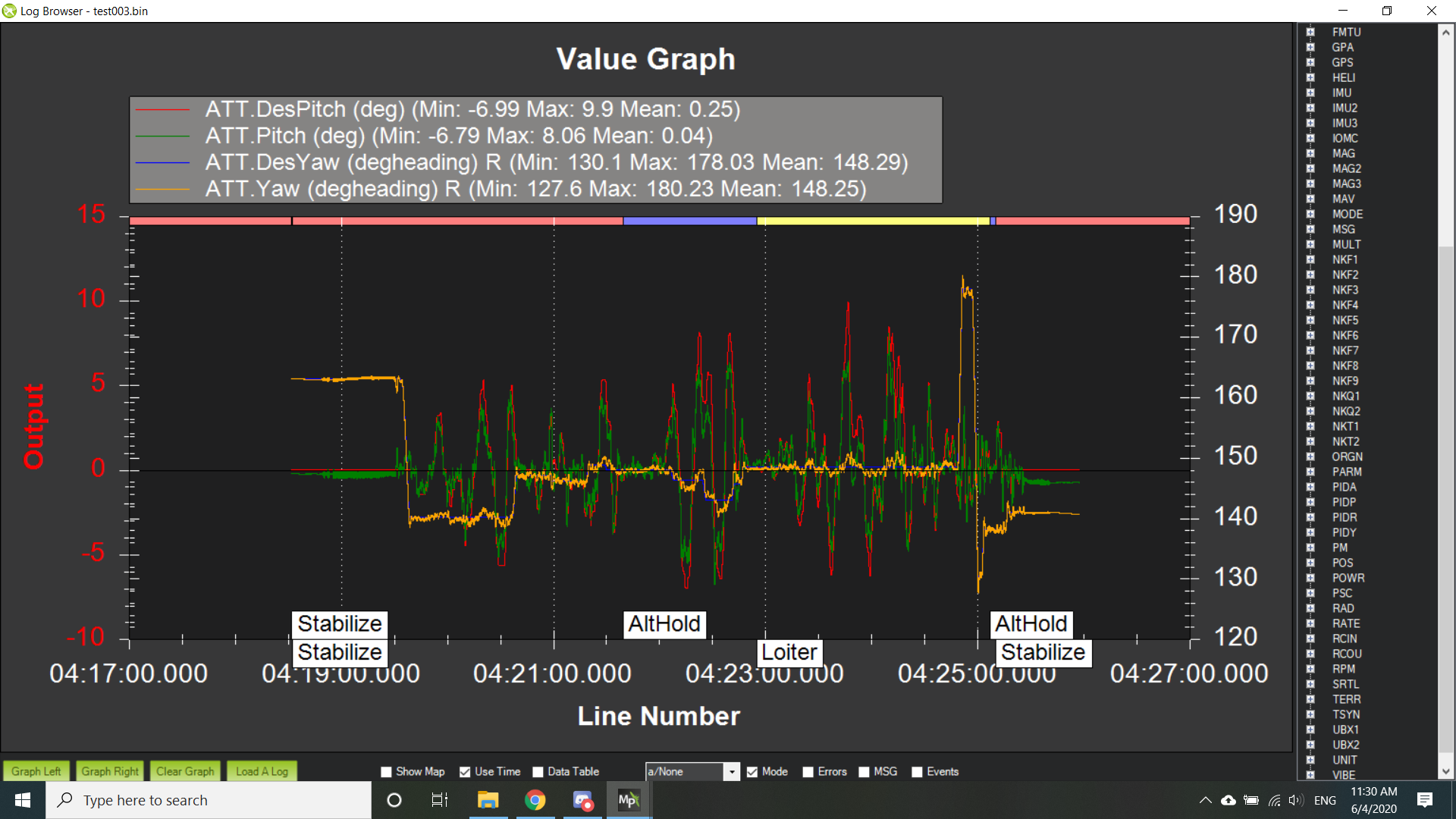
hi bill,today i did my new test.i set log_bitmask to 131071.Filter-related parameters have also been reconfigured.At present, the flight effect looks good.but the aircraft will still swing up and down in the loiter mode when changing the yaw.
I have changed the PID of PITCH but nothing has been improved, please help me to see it again, thank you.
I The rate seems to be unable to keep up, do I need to increase the VFF value?
@moluav do you have a video of this? I’m not sure that I am seeing in the data what you describe.
hi,bill.I’m busy with other things recently, I have to wait a few days before debugging it.
thanks!