I will be back to you hoping for some outputs.
Hello again,
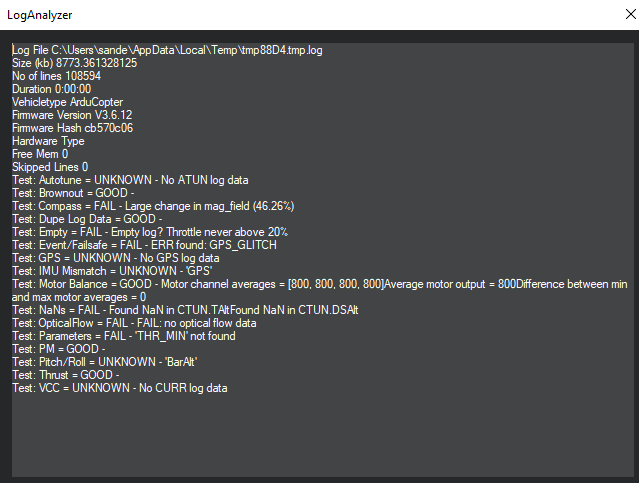
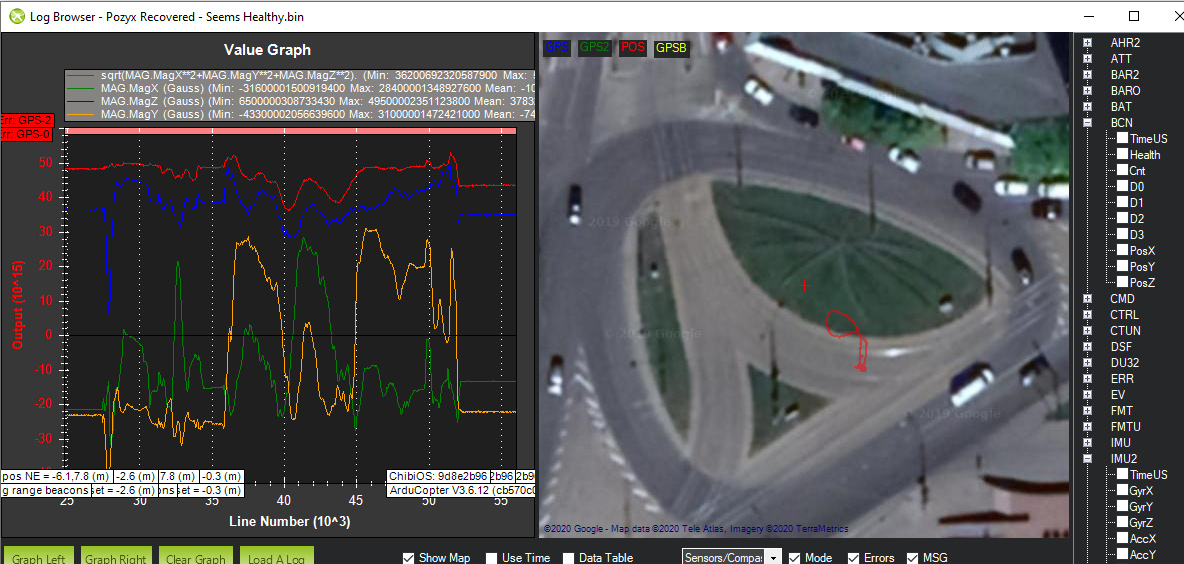
Below is my new log. I still have GPS glitch error but Health shows always 1.
Do you agree that the beacons are working ok?
https://github.com/ArduPilot/ardupilot/blob/master/libraries/AP_Compass/AP_Compass_AK09916.cpp Looks like your having a compass issue.
![]()
Hi Folks!
I have a question. Is it possible to use the new module DWM1001 to simulate GPS? or only dwm1000 are right?
Long time and am back. This is my new log. Seems that Beacons are ok. But GPS Glitch is still there. I havent flown yet but I guess it has to work.
I hope @rmackay9 or @ppoirier also can be helpful in this regard. Cause this GPS Glitching does not let me ARM at all.
Dear forum,
I hope you can help me out. I have an issue with the log file when using POZYX. The log shows distances in the range of 0,03m but It should be something around. 1m. Can you confirm that the distances should be sent by the Arduino in mm? Thank you very much!
Best regards
Hi all! I am trying to convert the xyz position from pozyx to lat longitude system. Anyone have idea to proceed on this?
In AP we do the conversion by adding the BCN_LATITUDE and BCN_LONGITUDE values to the beacon’s reported local position.
It probably isn’t relevant but in any case, I would like to change our AP_Beacon driver to remove these two parameters and instead just use the EKF origin. This would make it more consistent with other Non-GPS systems we support like optical flow and the T265 (aka “External Nav”)
Thank you for the reply. I wonder how was the conversion?
new latitude=vehicle_x (reported local pos,in meter) + BCN_LATITUDE (deg),
new longitude = vehicle_y (reported local pos,in meter) + BCN_LONGITUDE(deg)?
You can probably follow through how the conversion is done by looking at the AP_Location class.
hi is it posible to use pozyx with the px4 MINI? i cant connect the UNO with the telem1 because i need it for the connection with my computer. I want to do an autonomous flight drone with UWB! I want to add new flight point when the drone is flying a mission (dynamic).
The UNO is required and it must be connected via serial to the autopilot so if that’s not possible with the px4-mini then I think another autopilot is required.
what do you mean with autopilot?
Hello
What @rmackay9 means is:
You have 3 serial ports available on this Flight Controller , if you used them all, you need a bigger one.
Hello, i have a problem with the connection. The pozyx tag (shield) with four pozyx anchors are working almost perfect. i use for setup and calibratio the Pozyx creator contrller Software. Everything is working. I am not using telemetry anymore. Instead of telemetry i am using an ESP32 Microcontroller and connectetd it to the TELEM2 of my Pixhawk 4 MINI. This is also working very well. The conection is with dronebride and Wireless Lan. Now i want to share my problem with you: When i start QGroundControl then nothing is happening. QGC cant find a positioning and i dont know why? whe i start QGC then the Pozyx Software sais thet the Tag is disconected. What can i do to make it working (finding my position in QGC)? Thank you very much.
With Telemetry its the same problem. But i could make it working. The Problem isyou need to connect first the arduino UNO with USB to give it Power. Then you need to conect the Pixhawk 4 mini with USB to the PC and after it Start QGC. Then its working. BUt the next step is to put the battery on, disconnect the USB of pixhawk, then press "disconnect button of QGC and in the end connect with WirelessLan or Telemetry. But why? Why am i not able only connect Battery, connect with Wireles Lan and make it work?
It only works when i first power the arduono uno (with separte cable) and then put the battery on. But why?
@beka_beka, I can’t really answer your question but perhaps it is a power issue. Perhaps there is not enough power for some of the device attached?
i dont think so, because after i can see the position in qgc i disconnect the USB cable of the arduino Uno and only the battery is attached. It still works then.
Good day,
I have a problem with my QAV250 drone with Pixhawk4Mini and ArduPilot v4.1.x (latest version). I use QGroundControl and Pozyx Creator Controller software. As described in this link, I have completed all configurations (Pozyx for Non-GPS Navigation — Copter documentation ). Additionally I have activated EKF3 and deactivated EKF2. As source I have always selected “Beacon” at EK3! The anchors I have configured in the Pozyx software as 3D with different heights.
My problem now is that the drone is armed but does not fly up and executes the mission! Instead it beeps. I do not know what else I can do? Does anyone have any ideas?
I have created and transferred the path and tried to start using AUTO or LOITER.
ERRORS:
Warning: Mode change to AUTO(LOITER) failed: requiers position.
Critical:PreArm. Bad GPS position
But i turned GPS off or not??? I dont want to use GPS.