@Alexey_Degterev can you post a LOG_DISARMED=1 log of both the 4.5.1 test and 4.4.4 test? This change is not expected
Hi all - can anyone reproduce/assist with this issue? Specifically testing usage of Dshot with quad_plane params not enabled seems to cause issue with BLHeli_S/BlueJay ESC functionality.

Plane-4.5.2-beta1 has been released for beta testing and can be installed using MP or QGC’s beta firmwares feature or the .apj file can be directly downloaded from firmware.ardupilot.org.
The changes vs 4.5.1 are in the ReleaseNotes and copied below
- Board specific enhancements and bug fixes
- FoxeerF405v2 support
- iFlight BLITZ Mini F745 support
- Pixhawk5X, Pixhawk6C, Pixhawk6X, Durandal power peripherals immediately at startup
- System level minor enhancements and bug fixes
- Camera lens (e.g. RGB, IR) can be selected from GCS or during missions using set-camera-source
- Crashdump pre-arm check added
- Gimbal gets improved yaw lock reporting to GCS
- Gimbal default mode fixed (MNTx_DEFLT_MODE was being overriden by RC input)
- RM3100 compass SPI bus speed reduced to 1Mhz
- SBUS output fix for channels 1 to 8 also applying to 9 to 16
- ViewPro gimbal supports enable/disable rangefinder from RC aux switch
- Visual Odometry delay fixed (was always using 1ms delay, see VISO_DELAY_MS)
- fixed serial passthrough to avoid data loss at high data rates
- AHRS / EKF fixes
- Compass learning disabled when using GPS-for-yaw
- GSF reset minimum speed reduced to 1m/s (except Plane which remains 5m/s)
- MicroStrain7 External AHRS position quantization bug fix
- MicroStrain7 init failure warning added
- MicroStrain5 and 7 position and velocity variance reporting fix
- Plane specific changes
- Drop min Q_TRANSITION_MS to 500ms
- FBWB/CRUISE missing zero crossing of elevator input fix
- PTCH_LIM_MIN_DEG param units fixed to be deg
- Other minor enhancements and bug fixes
- DDS_UDP_PORT parameter renamed (was DDS_PORT)
- Harmonic Notch bitmask parameter conversion fix (see INS_HNTCH_HMNCS)
Thanks to everyone who contributed to these changes!
1 Like
sorry i can’t do this now. i rollback to 4.4.4
could you try to find the tlog where RC gimbal control didn’t work? we may be able to find the issue from there
ping @rmackay9
Several flights with 4.5.2-beta1 of different fixed-wings in manual, fbwa, cruise, auto (all mateksys H743 FC) all behaved as expected. Thanks to the developers. VTOLs will follow tomorrow.
Rolf
2 Likes
The transition also works very well with small, fast-accelerating VTOLs. Transitions with a small Z84 quad and an even smaller TriTilt with no loss of height and a “soft” transition.

Rolf
2 Likes
Nice flying Rolf,and very smooth aircraft
We have a double release today!
We have released plane 4.5.2 stable, and also released 4.5.3-beta1. This unusual combination comes from a bug fixed just as we were releasing 4.5.2 which we want to get out as soon as possible. The bug fix is in 4.5.3-beta1.
For 4.5.2 the changes are:
- Board specific enhancements and bug fixes
- FoxeerF405v2 support
- iFlight BLITZ Mini F745 support
- Pixhawk5X, Pixhawk6C, Pixhawk6X, Durandal power peripherals immediately at startup
- System level minor enhancements and bug fixes
- Camera lens (e.g. RGB, IR) can be selected from GCS or during missions using set-camera-source
- Crashdump pre-arm check added
- Gimbal gets improved yaw lock reporting to GCS
- Gimbal default mode fixed (MNTx_DEFLT_MODE was being overriden by RC input)
- RM3100 compass SPI bus speed reduced to 1Mhz
- SBUS output fix for channels 1 to 8 also applying to 9 to 16
- ViewPro gimbal supports enable/disable rangefinder from RC aux switch
- Visual Odometry delay fixed (was always using 1ms delay, see VISO_DELAY_MS)
- fixed serial passthrough to avoid data loss at high data rates
- AHRS / EKF fixes
- Compass learning disabled when using GPS-for-yaw
- GSF reset minimum speed reduced to 1m/s (except Plane which remains 5m/s)
- MicroStrain7 External AHRS position quantization bug fix
- MicroStrain7 init failure warning added
- MicroStrain5 and 7 position and velocity variance reporting fix
- Plane specific changes
- Drop min Q_TRANSITION_MS to 500ms
- FBWB/CRUISE missing zero crossing of elevator input fix
- PTCH_LIM_MIN_DEG param units fixed to be deg
- Other minor enhancements and bug fixes
- DDS_UDP_PORT parameter renamed (was DDS_PORT)
- Harmonic Notch bitmask parameter conversion fix (see INS_HNTCH_HMNCS)
Plane 4.5.3-beta1
For the 4.5.3-beta1 release we have the following changes on top of 4.5.2:
- Board specific enhancements and bug fixes
- correct default GPS port on MambaH743v4
- added SDMODELV2
- added iFlight Blitz H7 Pro
- added BLITZ Wing H743
- added highres IMU sampling on Pixhawk6X
- System level minor enhancements and bug fixes
- fixed rare crash bug in lua scripting on script fault handling
- fixed Neopixel pulse proportions to work with more LED variants
- fixed timeout in lua rangefinder drivers
- workaround hardware issue in IST8310 compass
- allow FIFO rate logging for highres IMU sampling
- Plane specific changes
- fixed cancelling of FWD_GAIN setting for tiltrotors
Details on the critical fix in 4.5.3-beta1
A user discovered a rare crash bug in lua scripting that affects all ArduPilot versions with lua support. The bug was discovered in bench testing and as far as we are aware has not caused an aircraft crash, but we want to get the fix out quickly as it is a potentially very serious bug. The bug is in the handling of exceptions in lua. If a lua script encounters an exception it will normally stop the script with an error message. When this happens there is a small change it will trigger a hard fault which will cause ArduPilot to reboot. The bug was initially noticed with the lua networking web server which uses lua protected calls to allow the script to keep running after a fault, which is why the issue was able to show up despite the low chance of it happening - with the protected call the fault can repeat rapidly, raising the chance of the bug triggering.
We plan on also doing a backport of this fix to 4.4.x. It is a simple one-line change so is easy to backport.
4 Likes
Flew the Convergence in RealFlight for a few hours on 4.5.3-beta1 and didn’t have any issues.
1 Like
Thanks @robertlong13 much appreciated!
Compile 4.5 with an error message ::you need to install empy with ‘python -m pip install empy==3.3.4’---------------
$ python -m pip install empy==3.3.4
Requirement already satisfied: empy==3.3.4 in /usr/lib/python3.7/site-packages (3.3.4)
Compilation 4.4.4 can be compiled
What’s going on ![]()
1 Like
After several days of rarely bad flying weather, I was able to fly ardupilot 4.5.3 beta 1 this morning with two fixed-wing airplanes and a small tritilt-VTOL (all Mateksys H743) without any problems. Thanks to the developers.
Rolf
2 Likes
getting the same error while trying to build
try these:
/usr/bin/python3 -m pip install empy==3.3.4
/usr/bin/python3 -m pip install pexpect
from your local ardupilot dir:
/cygdrive/c/…/ardupilot
though, I got another error after executing those lines:
Build failed
Traceback (most recent call last):
File “/cygdrive/c/…/ardupilot/modules/waf/waflib/Task.py”, line 348, in process
ret = self.run()
File “/cygdrive/c/…/ardupilot/Tools/ardupilotwaf/mavgen.py”, line 54, in run
from pymavlink.generator import mavgen
File “/cygdrive/c/…/ardupilot/modules/mavlink/pymavlink/generator/mavgen.py”, line 26, in
from future import standard_library
ModuleNotFoundError: No module named ‘future’
Not sure what’s happening
I executed these and afterward it seemed it generated something for me:
/usr/bin/python3 -m pip install empy==3.3.4
/usr/bin/python3 -m pip install pexpect
/usr/bin/python3 -m pip install pymavlink
/usr/bin/python3 -m pip install future
though, I am not sure what was the reason why I had to execute these, good luck ![]()
1 Like
Plane 4.5.3 has just been released. This is a minor update over 4.5.2 with an important bug fix for those using lua scripting.
Change from 4.5.2 are:
- Board specific enhancements and bug fixes
- correct default GPS port on MambaH743v4
- added SDMODELV2
- added iFlight Blitz H7 Pro
- added BLITZ Wing H743
- added highres IMU sampling on Pixhawk6X
- System level minor enhancements and bug fixes
- fixed rare crash bug in lua scripting on script fault handling
- fixed Neopixel pulse proportions to work with more LED variants
- fixed timeout in lua rangefinder drivers
- workaround hardware issue in IST8310 compass
- allow FIFO rate logging for highres IMU sampling
- Plane specific changes
- fixed cancelling of FWD_GAIN setting for tiltrotors
The most important fix is the Lua script related item bolded above. It is very rare but in some cases, if the lua script hit an exception it could cause the main C++ code to fail as well causing a hard fault and reboot.
Thanks to the developers and beta testers who contributed to this release!
4 Likes
Hello @tridge ,
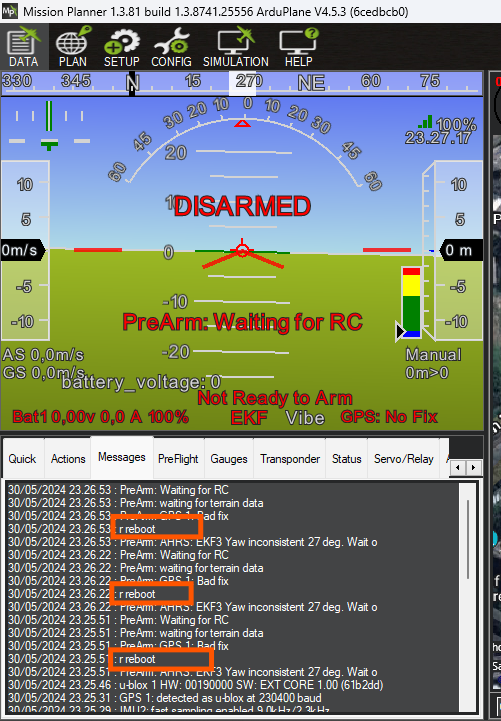
I just did “jump” upgrade my VTOL from FW 4.3.7 directly to FW 4.5.3 but I got strange message :" r reboot ".
This “r reboot” message keep appearing on the display .
The aircraft still on ground and I connect directly to my notebook.
The VTOL aircraft can fly very well when using FW 4.3.7 without any issue. I have tested long range flight about 50 km without issue using 4.3.7.
When I checked the micro SD, there is no log file written today !
Please advise what does it mean this “r boot” message?? Is it dangerous? How to solve this problem??
Is it ok if I did jump upgrade the FW directly from 4.3.7 to 4.5.3 (so I bypass FW before 4.5.3)??
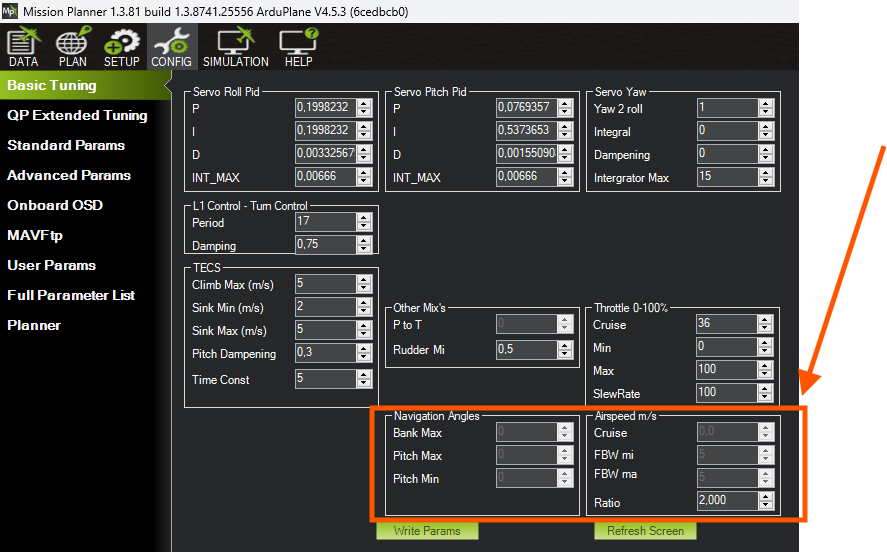
Another strange thing after upgrade is:
Some parameter data are missing on the Basic Tuning Page such as: Cruise speed, FBW max., FBW min., Nav. angle, Pitch max, Pitch min., etc.
I use Pixhawk Cube Orange (not the new plus).
Here are some screen shots about the problem.
Error message “r-boot”
Basic Tuning page after Upgrade to 4.5.3: blank parameter data…
Any advice is highly appreciated.
Thank you.
Best regards,
Tony
The full message is “Yaw inconsistent by XX deg. Please wait or reboot”. MissionPlanner is wrapping the message
this is fixed in the latest MissionPlanner beta.
Can’t you compile firmware with bootload in the new build? Or do you need a special order