Shouldn’t do too much harm to lower them quite allot, I would take it easy to start with tho say start of lowering by 10% or so. I would do Q_TRANS_DECEL first and hopefully that will solve your problem.
Summarizing,
If I want to enjoy:
- improved VTOL flight code, with improved transition support and loiter
- RSSI analog via sbus out
Then I have to install 3.9.1 beta3 NuttX. Is it like that?
New default PIDs are a little too aggressive for flying wings.
Taking off in FBWA default PIDs with a 10mph wind the wing flutters a lot. Other than that it reacts much better to control than previous defaults and similar to what I get after auto tuning flying wings. Is there a recommended setting that I should lower or increase to avoid the pitch flutter?
Thank you.
2 Likes
thanks for testing that! Can you post a DF log of the flight? I’d like to see what is driving the oscillation
Cheers, Tridge
Sorry I disabled the log because the SD card was giving me a hard time. I’ll look for another SD card and will try to reproduce.
thanks very much, much appreciated!
btw, I should also explain that the flutter would have have been increased by the takeoff into the wind if you don’t have an airspeed sensor. It won’t yet have learned the wind strength, so it would have underestimated the airspeed. That means it would have scaled the control surface movements too high. Did it fly better once it had done a couple of circuits and learnt the wind strength and direction?
1 Like
Yes it flew great, this was the only episode where it experienced the flutter, as soon as it turned left the flutter was gone. I did a few low passes into the wind but no flutter at all. I do have to say, that I lowered the throttle and turn left to try to get rid of it, I suspect that letting it go at the same angle and throttle it won’t go away. Based on what you say if I let it go, will it get out of resonance by itself?
It does not have an airspeed sensor, my 10mph estimate was based on weather forecast and guess-estimate.
Ardupilot scales the PID/output values based on airspeed, so your initial takeoff into the wind made the autopilot think it was flying slow (GPS only reference) and needed to increase the elevon outputs to achieve the right pitch. After it had a good wind estimate, it knew its speed better and scaled the PID/output values properly.
1 Like
Lanza,
Wing flutter will go away if you throttle back and slow it down. If you let continue to flutter it may escalate further and damage the wing.
You can try some countermeasures to flutter like removing any slop in the control linkages and sealing the gap between the elevons and the main part of the wing. Sometimes embedding a small spar can stiffen the wing a bit and change where the bad resonance happens - hopefully out of your desired flight envelope.
Paul
3.9.1beta3 including new default PIDs perfomed very well on my newly built Mini Sky Walker with Omnibus FC on todays Maidenflight:
The only adjustment was decreasing Scaling_Speed to 11 due to the low mean airspeed.
Regards Rolf
2 Likes
@Lanza I suggest not to fly like that, if subject to many cycles of such flutter, things can go very wrong for it, maybe a good auto tune session will calm it a bit.
It does need some turns in order to learn the wind speed. As long as you do a few turns it should improve after a launch into a headwind.
Although as @flyingw and @Eddi_Maevski say, flutter like this can damage the airframe. How likely it is to cause damage is very airframe dependent.
Cheers, Tridge
@tridge @Eddi_Maevski @Naterater @flyingw thank you for the feedback.
I agree that this condition could break something in the plane, but my biggest concern are the servos. The plane (s800 v2) is stiff and there is little or no play in the linkage, I have experienced this flutter in all my flying wings , Versa Wing, Z-84, Skywalker Falcon and with different pixhawks and versions of arduplane. . The common variables in all episodes were, wind is 10mph or more, and after the autotune session. This is the first time I experienced it with default PID values.
I am hoping for the wind to pick up again to try to replicate the issue and log it.
This was using APM With Arduplane 3.4 on the Skywalker Falcon during the Autotune session
Here is my log for exactly the flutter issue on small wings. http://www.filedropper.com/2018-09-0916-56-45
I was running a sky shadow S800 wing with default 3.9.1 PIDs. Severe flutter in minimal wind.
I will be reverting to the 3.9.0 defaults and will let you know if I have any success (next weekend)
RLL2SRV_P 0.6
RLL2SRV_I 0.1
RLL2SRV_D 0.02
PTCH2SRV_P 0.6
PTCH2SRV_I 0.1
PTCH2SRV_D 0.02
TECS_PITCH_MAX 0
NAVL1_PERIOD 20
1 Like
Hi @tridge may be the log in the previous post will shed more light on the default PIDs. This is the 3rd instance of someone experiencing the flutter on maiden. So far all 3 where using small flying wings S800 and Wing Wing Z-84
Thank you!
I snuck out and had a quick flight with 3.9.0 default PID values on my S800 and it flew well.
thanks, that is very helpful! It clearly shows that it is the D term that is the problem.
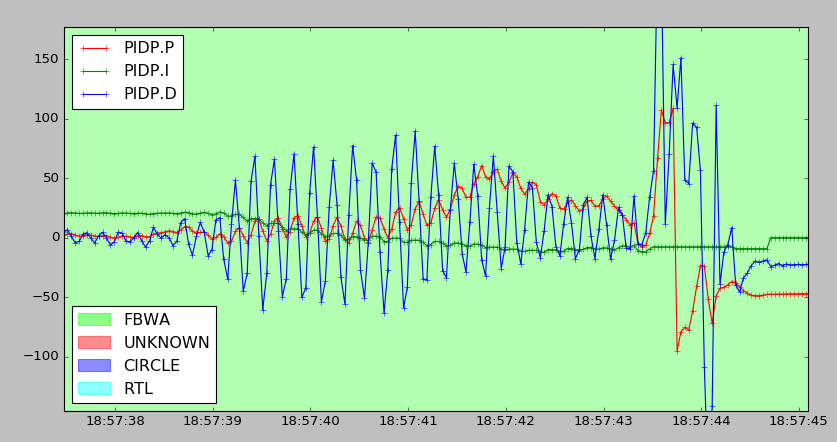
I will halve the default pitch D for the 3.9.2 release. Can you try with defaults for 3.9.1, but with half the PTCH2SRV_D term? The default is 0.08, so try with 0.04.
Cheers, Tridge
1 Like
Brilliant - thanks for the explanation. I will try out the new values over the weekend.
Much improved performance, thanks again. Log is here if you would like to take a look http://www.filedropper.com/2018-09-1517-27-39
1 Like