Using Drotek.
Had way too many problems with Emlid Reach M2
Corrado
Using Drotek.
Had way too many problems with Emlid Reach M2
Corrado
Ok thats good to know. I was contemplating to buy an Emlid. Thanks
The claim made by the author of this thread is bit confusing that the firmware switching between Barometer and GPS for Alt hold.
I am trying to figure out who is writing the Arduplane code these days. Is it Iampete or someone else?
I have a strong feeling that something has to be wrong in Arduplane code. At least sometimes our planes crash due to this situation. So it would be perfect, if Arduplane coder could join to solve this issue.
@UAVSkies, you were asking about our planes. See web page www.radai.fi . There are some description about our planes and the company. We are conducting geophysical surveys, mainly magnetic surveys.
One thing for sure as some of us has mentioned, That upgrade to a better GPS. Here 2 also has issues. I don’t think Here 2 is any good. Just my opinion.
Yes, I will do that. Upgrading GPS unit is not bad idea at all. I thought Here 2 is a good GPS unit but it seems that its not so super.
I would be pleased to make surveys also in USA. I think one way to do international drone survey business is to use local drone operators because they know local drone legislation. If there would be mineral exploration targets in USA or Canada, local drone team could make the survey and data processing is done later by other company. It would be win win for all teams. Difficult part is to find customers, but that is coming easier in future. Are you interested ?
I am a Canadian as well as American  based out of US and Canada.
based out of US and Canada.
We can talk off line. We have part 107 license and Ham license etc. i have access to 100,s of licensed pilots in the US and Canada.
We mostly do work for the federal govt.
Is not the brand of the GPS the problem. Here 2 GPS is a single freq unit, series 8. To have a trustable and solid GPS RTK FIX you need a double freq l1/l2 F9 GPS unit.
I don’t think Here 2 is worse than any other ublox based 8 series gps unit.
Agree, however Here 2 GPS has reliability issues I think. So many threads out there people struggling to make them work. My $15 single Freq dollar GPS works better sometime
I had Here 1 sold both of them thinking Here 2 + is better and bought two of them and now thinking of getting rid of both of them.
No more single freq GPS on any expensive UAV.
I prefer unit with external antenna so i can mount whatever antenna i like and is best for the job, and i prefer units wich have 2 serials avail, i do not understand if the one in pics has them.
Interesting discussion. Has anyone compare the tolerance between, an altimeter, GPS, and FC-barometer-sensor?
Altimeters are generally accurate within 20 to 30ft per 1000ft and as density get thinner there accuracy reduces up to 250 to 300 ft.
If Ardupilot community wants to improve altitude accuracy, what would be your target tolerance?
For surveying how much altitude error can be tolerated?
Barometric “accuracy” is not the concern with barometers; the environmental barometric pressure change can be tens meters on multi-hour flights. This is problematic for overlap, and VERY problematic for automatic landing, especially for rangefinders with limited range. GPS altitude reference is more reliable than barometric pressure on long flights, even without RTK. With RTK, it can replace a LiDAR absolute altitude reference for landing.
I haven’t had the opportunity to fully test all of the ZED-F9P options yet, but I will soon. What I do know is that there are many options, so making an accurate test comparison will not be easy. Some have external antennas, some don’t, and that’s a big factor.
For “surveying” tolerance, I can tolerate about 10% of altitude error during collection (navigation error), but NOT in post-processing. With these PPK systems, they should be sub-5cm accurate (post-processing error).
I’m in the same boat; the antenna gain is poorer than the emlid, I rarely get RTK fix, and I have never been able to do precise interpolation of photo centers like I can with the Emlid Reach series.
Do you know why the author believes his FC is switching between Barometer and GPS for alt hold?
@Nathan, I am not familiar with PPK system. I imagine that you are performing topographical surveys at or below 400ft?
10% is 40 feet of error.
@tridge can you please chime in here? I have been told your the man for Arduplane code. Thanks
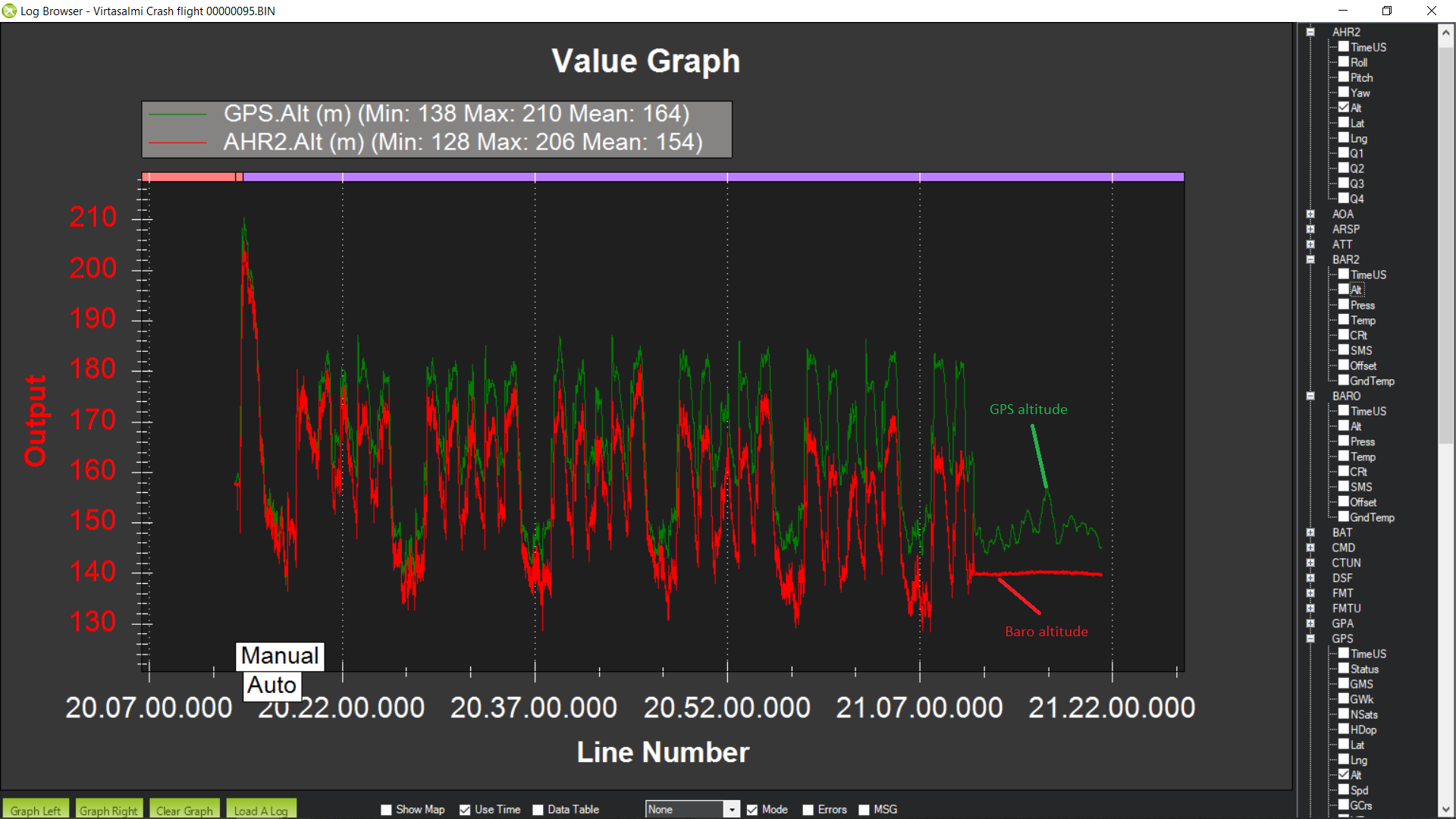
If someone could explain the following graph to me. How is it possible that GPS altitude starts differ from baro altitude. This kind of situation happens sometimes, not often. That is only 1 hour flight. In the beginning baro and GPS see the altitude same. After one hour, just before crash, the difference is about 20 meter. And the difference is rising all the time, so after 2 hours could it be like 40 meters etc…
Baro altitude was correct. Plane altitude was decreasing little by little due to weather air pressure change. GPS was set as primary alt sensor.
We’re having similar problems. Even 50 minutes flights to higher altitudes give a massive barometer altitude error.
We are using lidar for landing, but still struggling with the big differences in altitude.