Hey guys,
A noob over here I have been flying with a friend’s quad with pixhawk couple of times and loved it. Been on the search for a pixhawk rotorcraft and finally found a good hexa (tarot 680) and bought it. Unfortunately I cannot get it to fly good, had couple of small flights with bad props and thought that some problems are coming from there, because of the vibration, but yeasterday I flew with t-motor props and the problem persisted. I have checked the booms, everything is tight, the pixhawk is attached by velcro.
What would be causing this problem? What should I check/do?
Hello Gary,
thx for responding! It doesn’t fly well, actually when I switch to a different mode from Stabalize, on the ground the motors are not rotating simultaniously and it crashes on take off - this hapens in AltHold and Loiter (the modes I have flown the quad before).
I am thinking that I have calibrated something wrong, but dont know what.
Is there something like reset to factory settings and to start from the beggining?
We need more information. Did you build this yourself. Hexa can be harder to setup then a quad for some reason. If possible can you upload a fight log from the copter. They are .bin files in the APM directory. This will tell use what you have setup and what is going on.
I had a Tarot 680 that I built and it flew pretty well from setup. You need to make absolutely sure you do the following with that frame:
Level the motor mounts
Check that the COG is about centered with where the FC is.
Balance the props (especially if using CF props, but they should be balanced regardless)
Also, make sure you have the correct firmware loaded (Hexa X for the 680) and make sure you are plugged in to the right motors and they spin the correct directions.
EDIT: just noticed you said you affixed the Pixhawk via velcro? Probably not a good idea as vibrations will cause issues in altitude and GPS modes. Find some 2 sided 3M foam tape (at least 1/4"/7mm thick) and mount with that. Here are some other alternatives:
Ok, @iseries - here is the *.bin 38.bin
hope You will be able to download it.
I did not assemble it, got it already done. Some of the bolts were kind of loose, so I tighted them. @BigTulsa -
● for the motor mounts You mean that should be/seem to be even, or there is some other way to check the level? Motors are running the right way - front left motor is spinning clockwise.
● Actually I haven’t balanced the hexa, bacause everything seemed perfectly in order and the pixhawk was in the center. Will do today
● First props were awful - penny store ones, luckily the hexa came with genuine t-motor props, that seemed balanced and when rotating it really seems stable (with the penny props vibrations were obvious)
Actually You got me here, with the firmware, in the MP I select hexa, which is in one group with quads and here I got confused, no where I was able to check that I have loaded hexa firmware, only by rotating the engines.
I got it with such tape, but old and thought that in coctail with the penny props there is nothing good to come, put the velcro, but still not satisfied, will look for some ticher tape, or will buy a 3d printed mount, or both. Thx for the link!
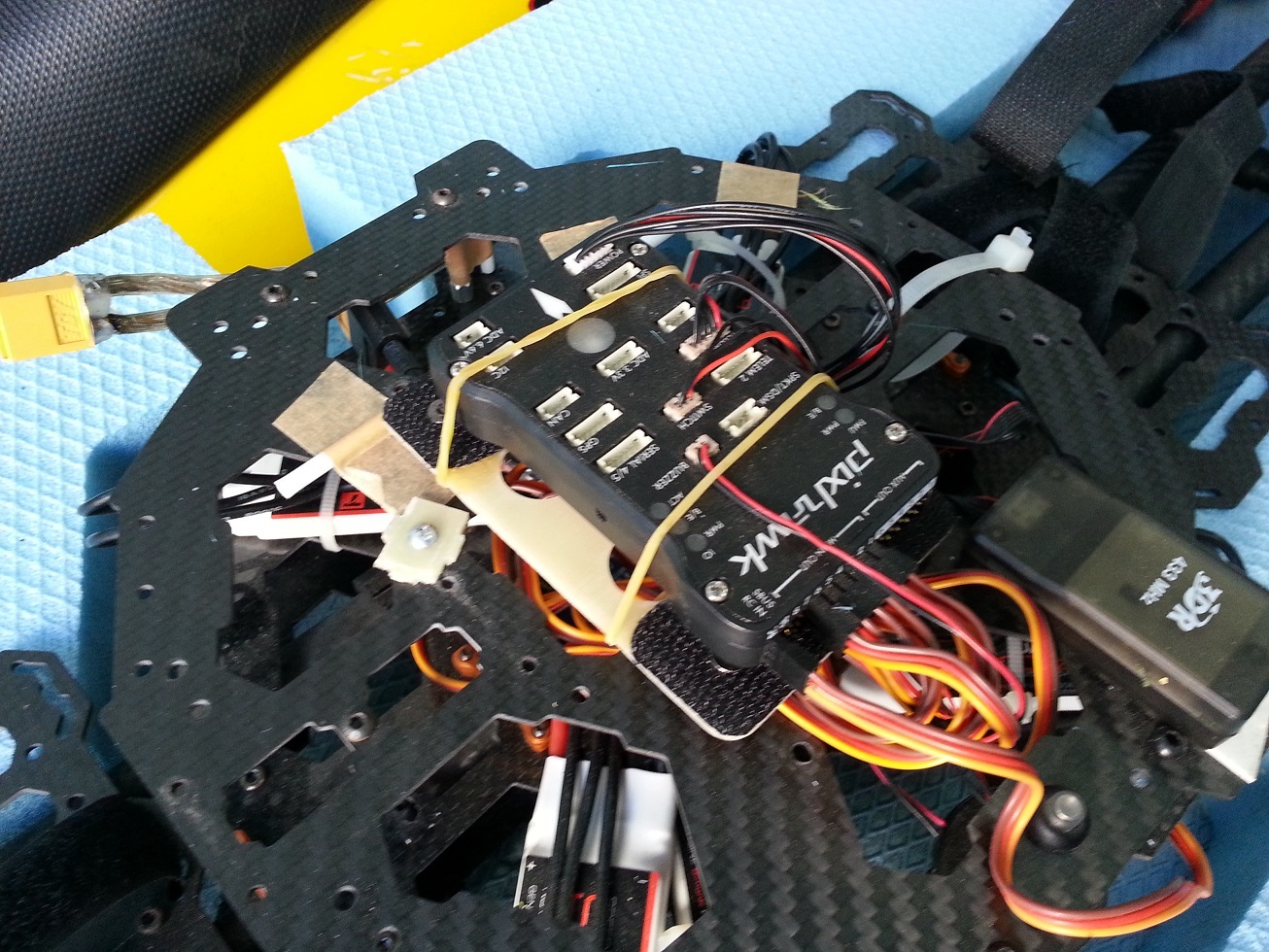
I will send some pics of the hexa, to know what we are talking about :), sorry I haven’t done it so far.
Ok, you got some work ahead of you. First the copter has very bad vibrations. Second is that it is fighting a clockwise yaw so you must have a motor turned in that direction.
Wow, thats a bad thing, so I have 4 motors turning clockwise and 2 counterclockwise and props are as they should be, I will try to make a video to show.
Thank You for what You said about vibrations, will try to find an appropriate tape to solve that for now ( I already ordered an anti vibration plate).
I decided to disassemble and reassemble big part of it (there were 3 central plains, now I will leave 2) - booms are between 1st and 2nd, ESCs were between 2nd and 3rd, on top of the 3rd there was a small carbon square on which the pixhawk was mounted (not good in my opinion) and on top of all this it was a rectangular plain on which was the GPS.
Now I am attending to put the ESCs below the engines, to use only 2 central plains and a small 8 angle plain on which to put the pixhawk and the GPS mount.
I didn’t find 3m thick tape, but will use the same foamy material and some glue, hope that will work… till the antivibration mount comes.
I made an ugly transport case from foam, I am not worried anymore about transportation, if someone is interested I will post some pics.
 I have been flying with a friend’s quad with pixhawk couple of times and loved it. Been on the search for a pixhawk rotorcraft and finally found a good hexa (tarot 680) and bought it. Unfortunately I cannot get it to fly good, had couple of small flights with bad props and thought that some problems are coming from there, because of the vibration, but yeasterday I flew with t-motor props and the problem persisted. I have checked the booms, everything is tight, the pixhawk is attached by velcro.
I have been flying with a friend’s quad with pixhawk couple of times and loved it. Been on the search for a pixhawk rotorcraft and finally found a good hexa (tarot 680) and bought it. Unfortunately I cannot get it to fly good, had couple of small flights with bad props and thought that some problems are coming from there, because of the vibration, but yeasterday I flew with t-motor props and the problem persisted. I have checked the booms, everything is tight, the pixhawk is attached by velcro.