Hello my friends in this thread.
@LeonardTHall
@proficnc
I flew my S1000 w/Pixhawk 2.1 again today. We got it to behave "decent’ in alt hold mode and flying gentle. have it tuned decent in pitch, but ROLL is NOT good. still very sluggish and wobbles. The pitch and roll PIDs are just about the same and yet the roll behaves much different.
Pitch PIDs
ATC_ANG_PIT_P,12.34839
ATC_RAT_PIT_P,0.28
ATC_RAT_PIT_I,0.28
ATC_RAT_PIT_D,0.0057361
ATC_RAT_PIT_IMAX,0.5
Roll PIDs
ATC_ANG_RLL_P,12
ATC_RAT_RLL_P,0.28
ATC_RAT_RLL_I,0.28
ATC_RAT_RLL_D,0.005
ATC_RAT_RLL_IMAX,0.5
How can those setting above be so close and yet behave SOOO different? Pitch = snappy and nice. Roll = jello
ALSO, we changed just about every value in the Roll settings and saw ABSOLUTELY NO CHANGES in response. So, either i have somethign else to turn on/off to make a difference or the Roll PIDs are being IGNORED?
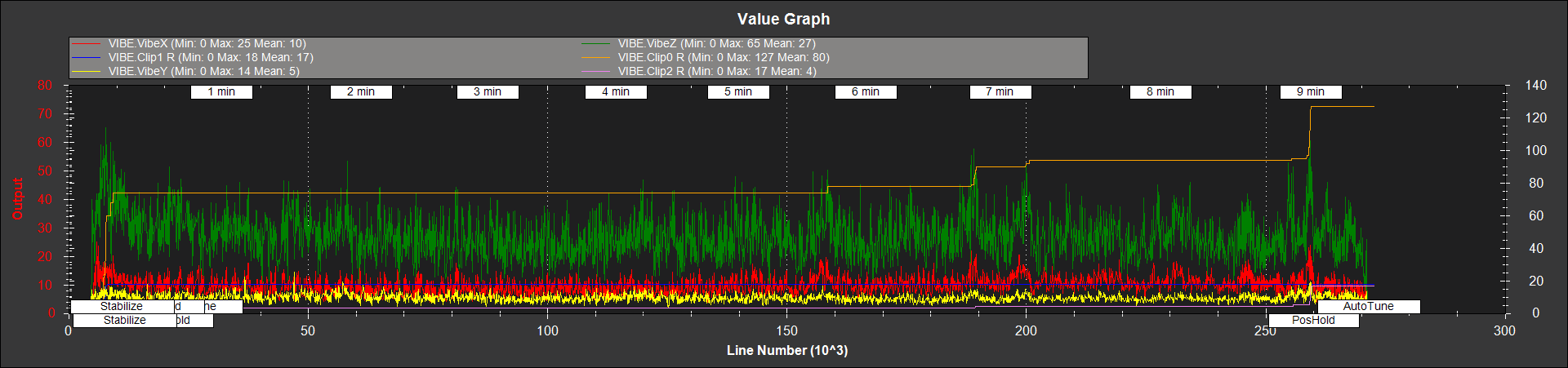
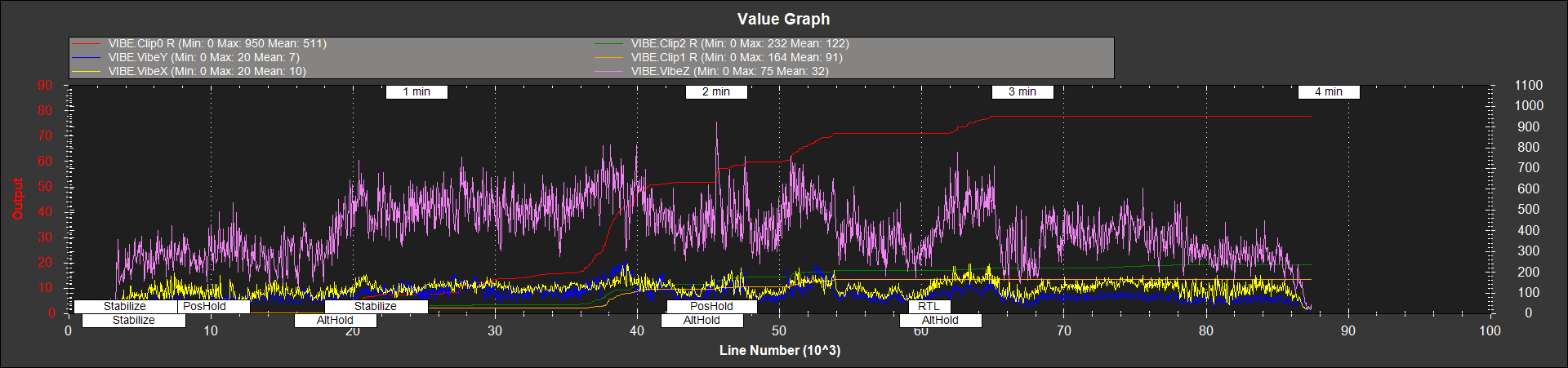
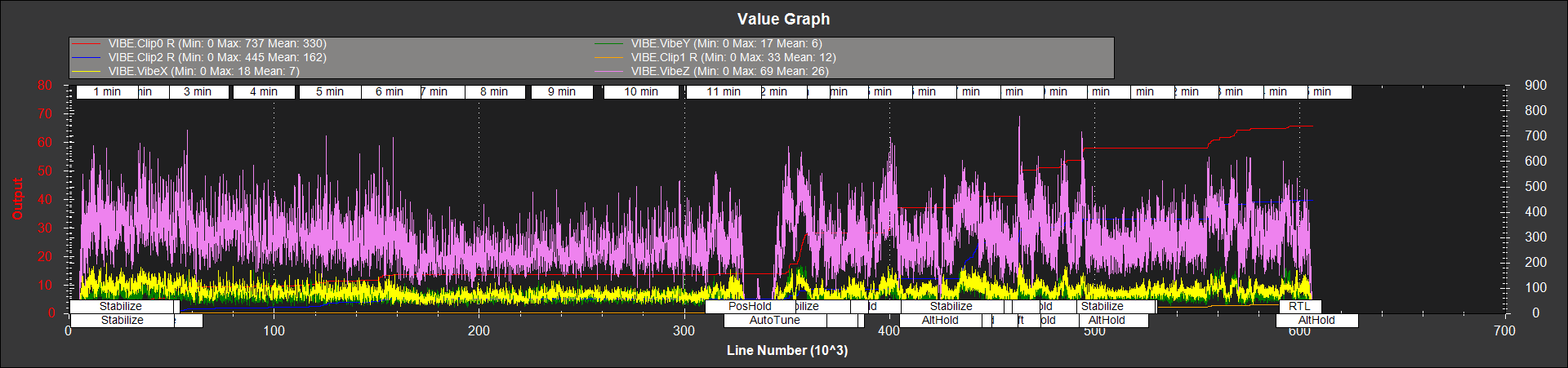
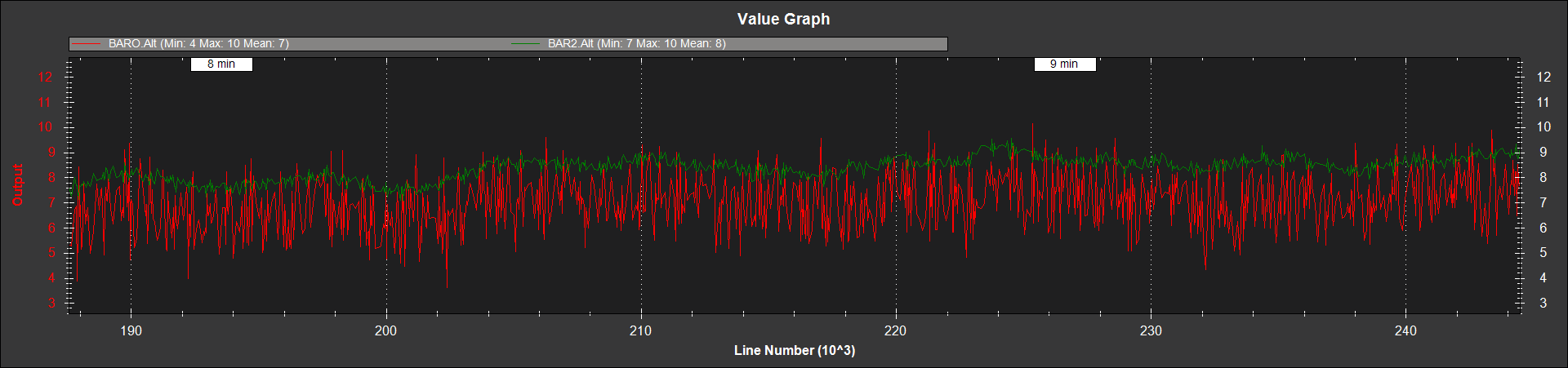
I am posting my logs today where you can see i changed the Roll PIDS and no real changes. Flew inside in EXCELLENT conditions in Alt hold because stabilize was a bit tough. The throttle in stabilize is VERY VERY sensitive and I could not get it to back off. Any advice there would be great also.
then we flew outside to see how “loiter” was going to work. When we pushed it hard in roll it went into the wobble of death. Didn’t crash but had to hit the throttle and flip back to alt hold to save it.
I would REALLY love to figure this out.  Help would be MUCH appreciated.
Help would be MUCH appreciated.
![]()
Then we put it in loiter and pushed it to roll, and it began to wobble and overcompensate and almost crashed.
here are my log files today.
also, the throttle in stabilize mode is VERY VERY sensitive. not even one mark on the throttle stick and it is ready to take off.
https://drive.google.com/open?id=1cGp74zZA6piQAuZYChUeST-hvaaByEHg