@yaapu tested latest code, basically the same behaviour as before. can’t wrap my head around the performance discrepancy on USART1 vs other UARTS
USART1: constant rate of 150 no matter what
other UARTs: basic rate of ~10 - 15, increasing to ~ 50 when USB connected (just plugged into PC, no active MAVLink connection). stalling to ~ 2 over time
intermittend No RC Receiver flags and unmotivated RMFD switching
my individual guess is that this is a melange of ardupilot UART handling and CRSF bandwidth saturation issues. without any profound insight, i don’t think we should lose valid RC Input for more than 200 ms unless intentionally choosing a low update rate.
two more points i noticed while testing:
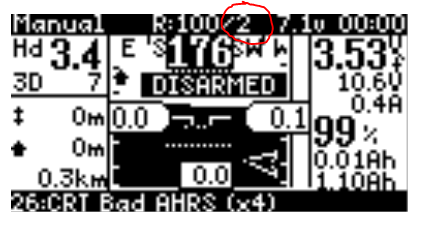
the (dis-)armed panel consumes a noticeable amount of your insanely awesome map widget.
passthrough sensor_status_flags information is pretty verbose and cautious regarding severity level rating where the base-code is a bit more tolerant. i’ve noticed constant "CRT: Bad AHRS" flags, likely due to using_gps being flagged on my no-compass setup until EKF yaw gets aligned to GPS velocity vector. quite some effort has gone into avoiding the “Bad” label on an expected process. might be an option to use the “healthy” flag here instead.
Hi @vierfuffzig , one more version to test, this one should be much better, I relaxed a constraint that should not be necessary on full duplex link (discussed this with @andyp1per) arduplane_matekf405wing_v2.zip (631.1 KB)
did you actually arm the vehicle? that huge disarm dialog goes away ad only comes back on next disarm, it never bothered me but since it’s pretty big I can understand that could disturb
Those “verbose” errors are there from the original authors of the library, it might be time to refresh them with updated messages
Hello Alex,
very impressive project. The last summer I use for the RC channels the TBS and for the telemetry the FrSky. This works fine and so far no lost on planes. Exept that one’s where the failure whas between the ears.
I like the idea to have evertything on one RX/TX system. The Horus should be just a joystick and screen.
So I installed Your latest version on a plane and get it running so far.
From Ardupilot I use a Pixhawk 1 on that plane and from TBS a micro V2 receiver.
Firmwares:
Open TX: 2.3.10
ArduPilot: your latest repo 0.7
Horus: 190b_0.7
TBS: V3.72
Normaly I run this Pixhawk as s FMUV2. But if I compile it I get no telemetry connection. If I compile it as a Pixhhawk 1 it will work as wirtten in this thread.
As next I like to install the firmware on a “Holybro Durandal” for the next plane. For my understanding the telemetrie should run on all suported hardware.
Second question - is there a posibility to get the FrSky sensors on the Ardupilot or Crossfire?
At the weekend I will fly the plane to see how it will be work and respond.
Compiling for fmuv2 from my branch will not enable CRSF features, as you’ve found out you need to compile for Pixhawk1-1M or Pixhawk1.
The durandal has 2MB of flash and CRSF is enabled by default so it will work out of the box, I can compile it for you or you can compile it yourself.
As for frsky sensors in a crossfire ecosystem it’s not possible right now
@vierfuffzig I can’t reproduce this issue, but while testing I’ve found a minor bug on mode 2 custom telemetry rates, I’m building version 0.8 of my branch and in the meantime I built this for you with rate debug info enabled
I can’t seem to get telemetry working. I have been testing CRSF protocol off the dev build of arduplane on multiple vehicles and haven’t had any problems.
I have switched to the current build here and discovering new sensors is not finding anything.
I can see on MP under messages the CRSF rf mode / packet rate msgs and have rc but am not able to get any telemetry on my T16 with crossfire full size module v3.78 & v4.05 and micro rx.
Not sure what I am doing wrong.
Shouldn’t there technically be two sets? the custom telemetry you have added and also the built in CRSF telemetry messages eg… attitude/gps/mode/batt?