You need to change the range of the FFT to cover the peaks present. So:
FFT_MAXHZ,250
FFT_MINHZ,40
With regards to payload or no payload you don’t have to change anything regarding the FFT driven notch filter. The peaks will be tracked.
You need to change the range of the FFT to cover the peaks present. So:
FFT_MAXHZ,250
FFT_MINHZ,40
With regards to payload or no payload you don’t have to change anything regarding the FFT driven notch filter. The peaks will be tracked.
I tried to do an autotune today and it failed. Drone crashed pretty badly during roll axis tuning. Can someone please help understand what went wrong? The entire drone frame is pretty much totaled ![]()
Here are some of the relevant parameters I had set prior to tuning:
INS_HNTCH_ENABLE,0
ATC_RAT_RLL_FILTD,10
ATC_RAT_RLL_FILTT,10
ATC_RAT_PIT_FILTD,10
ATC_RAT_PIT_FILTT,10
AUTOTUNE_AGGR,0.08
AUTOTUNE_AXES,1
It seemed to work okay for a couple of minutes but then during one roll twitch it just went straight to the ground. I got this message on the GCS 2-3 times prior to the crash:
AutoTune: failing to level, please tune manually
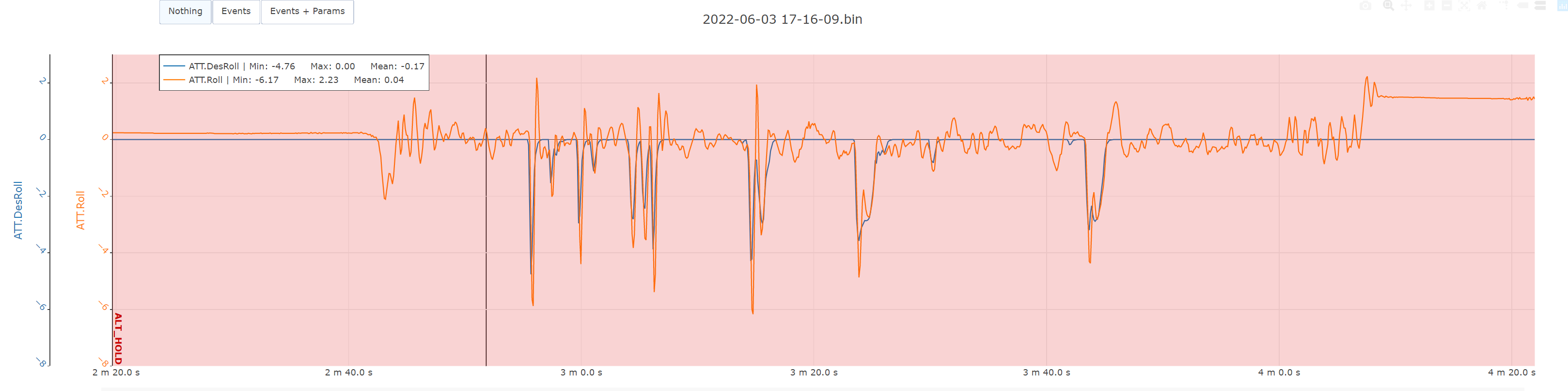
Why does this happen? Looking at my previous flights the desired and actual Roll graphs showed fairly close agreement:
Which indicated that it was safe to autotune. Here is the log.
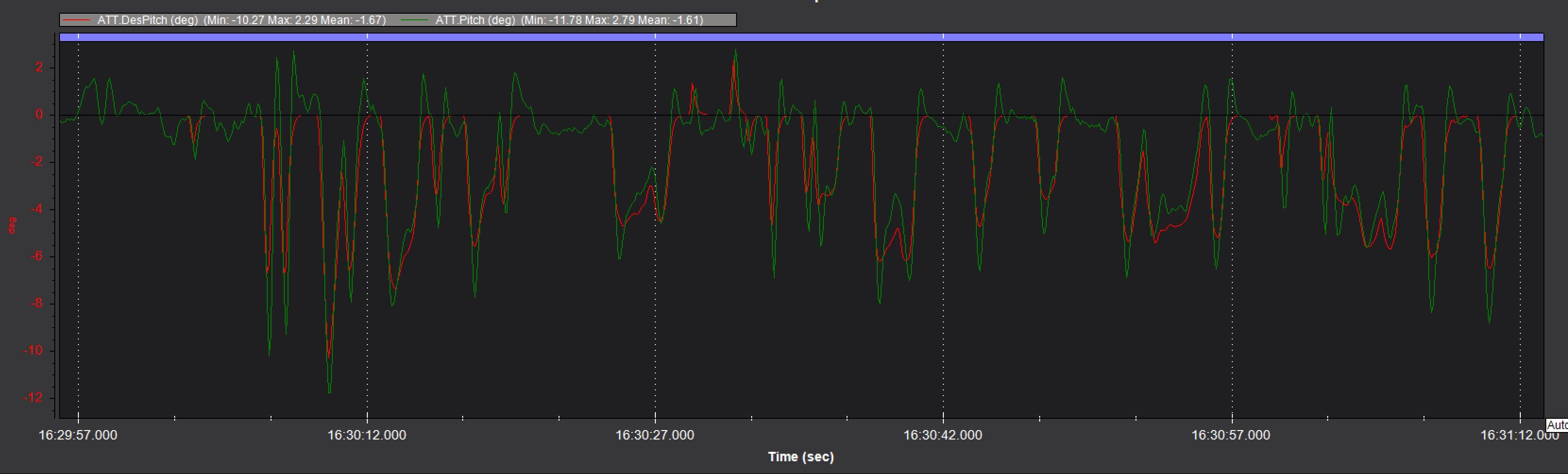
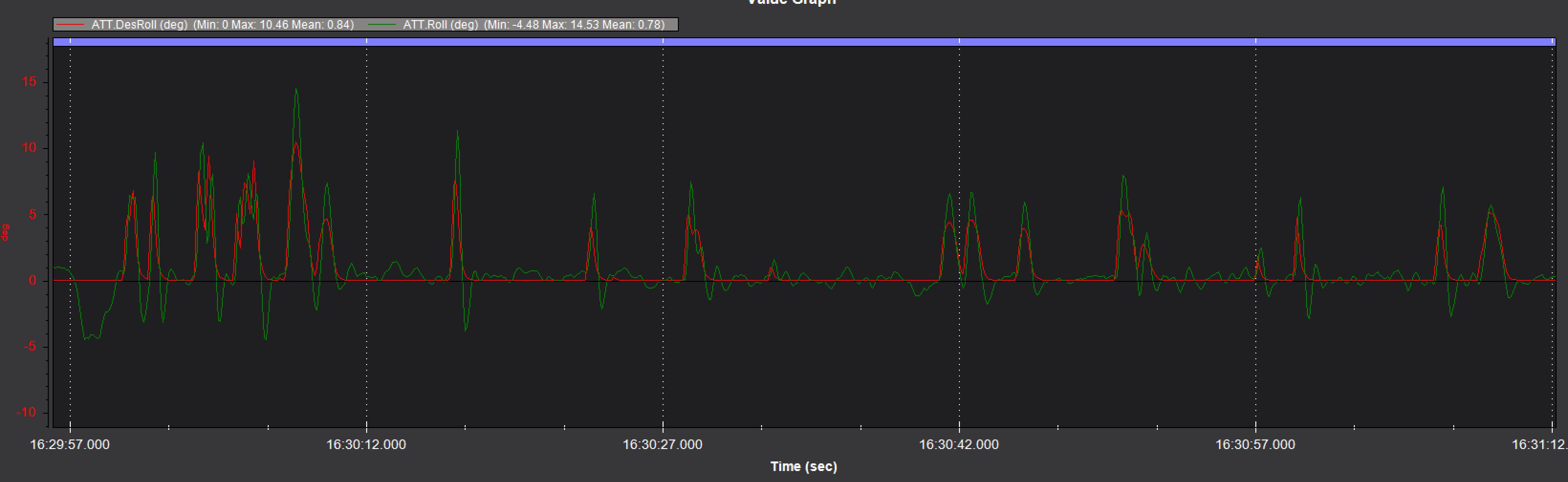
I think you could have done some manual PID tuning before running Auto Tune. These don’t look that good as a starting point IMO:
Also, you should always configure the Notch Filter before running Auto Tune or you will just have to run it again after it’s setup. You had FFT churning data but the filter is disabled.
So Motor 1 lost thrust and Motor 2 dropped command to attempt stabilization (typical signature). Hard to say what caused that. Desync or something electrical/mechanical.
Why are you still on 4.1.5?
Hi Dave. Thanks for your input.
How do you know if it’s at a good starting point? Do you have an example?
I think you are right about Motor 1 losing thrust. How did you figure that out from the log? I saw it happen but I wasn’t sure how to glean that from the log.
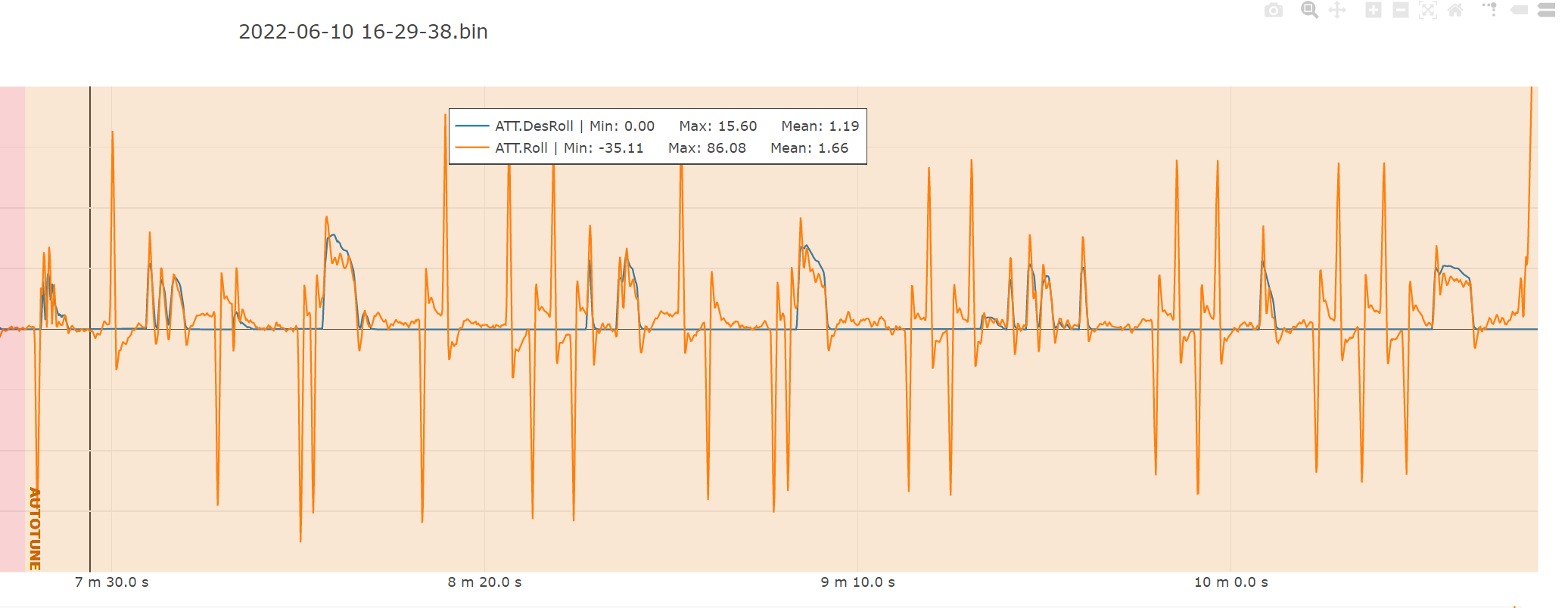
What exactly is happening when it “fails to level”? Why are there large ATT.Roll spikes but no large ATT.DesRoll spikes here:
Do you think my ESCs gave way? I am using a 340kV motor with a Hobbywing X-Rotor ESC
1)There is more overshoot on pitch and roll than I would like to see. It’s not terrible but I would have done some in-flight tuning on kP to improve it.
2) Graph the motor outputs. You can see motor 1 command go to max,a sign of thrust loss. And the opposite arm motor dropped to MIN. Then you have an overall loss of thrust for stable flight.
3)You can’t really look at actual/desired during Auto Tune twitching. Failure to level is after a twitch it takes too long to settle. This oscillation can be dangerous hence the warning.
4) It’s difficult to troubleshoot this sometimes. ESC telemetry can help by looking at motor RPM along with the output. Current can help too, do you have that setup (not in front of the log now)
Thanks again, Dave. I don’t think these ESCs can do telemetry. What current are you referring to? Is that part of the telemetry message?
Battery current is not showing properly.
Thanks, Dave. I’ll look into that. It was in fact one of the ESCs which burned out – tested today with a couple of motors. What’s a good ESC for this build? I’d like something with DShot and telemetry. I am considering this:
But there aren’t many reviews about it and I don’t even see any heat management on it. I need something with a fairly high current capacity >50A (?) perhaps.
You may not have many choices. A lot of out of stock options from GetFPV or Racedayquads. Those would be a good choice if the current capacity is sufficient.
What exactly causes the desync problem? I have been researching for hours and there are countless posts about this but I couldn’t find a definitive explanation for its cause. How do I ensure it does not happen again? I have been using these ESCs for stable hover and auto missions and they have not done this before; it only happened during autotune.
When I tested the offensive ESC with a motor it was causing the motor to “stutter” on throttle up. Do I need to use different ESCs? Which ones would those be? The Lumenier model:
seems to be targeted towards racing drones. From reading around it seems that T-motor ESCs are a no-go given the number of issues reported here. What about these ESCs?
The Neuron 60S seems to have everything (BLHeli_32, Dshot, even nice heatsinks), but seems targeted for RC planes. Not sure if it has desync problems on a hexacopter. The Hobbywing does not have any telemetry or Dshot but people have reported to get good results from it.
Should I just make a separate topic about this?
My guess is that it’s not the ESC that’s the problem but the noise you are putting through them. Lots of noise is a good way to burn out motors and ESCs (and your graphs above are showing a lot of noise). Stuttering (or grinding) sounds like noise to me - do a motor test on the bench w/o props and make sure the motors run nice and smooth. This is direct input without noise so will tell you if something is up with the setup - if they stutter on the bench then it’s something to do with the ESC/Motor config if they are smooth but stutter in flight then more likely noise that you need to eliminate. Do short test flights and make sure the motors come down cold/warm - hot motors is also an indication of noise. Noise is eliminated through good mounting and effective filtering.
The test I mentioned above was with the offensive ESC + motor on the bench sans props and flight controller. When I changed the motor and tried again it did the same thing so it must be the ESC. I’ve had several flights before with untuned parameters and the motors would only get slightly warm, nothing too severe to the touch.
What noise are you referring to exactly? Gyro noise?
You should try a few of things:
The ESCs I have currently do not support telemetry or Dshot. I was asking for recommendations on good ESCs for my build (960 mm frame hexacopter, Cube Orange, 8-9 kgs AUW)
Hi Andy,
Does bi-directional Dshot work on hex configs now? Your topic here says it is only for quads. Asking so that I can have RPM-based harmonic notch filters.
It should work on hex configs but you will generally only get RPM from 4 channels. What flight controller? I think we could expand to hex now that some of the other issues are resolved.
Cube Orange. Will the RPM-based notch filtering work if there is only input from 4 channels?
It should do - if there is no incoming data then the notches won’t move. It’s true that it used to be that we only create 4 notches so it wouldn’t matter. Now that we create notches for all motors we might have to think about how that works.
Wait, are you saying there is a separate notch for each motor per harmonic? I thought it took the averaged frequency from all the motors as the center.
The default is the average and that should work fine. INS_HNTCH_OPTS=2 gives you a notch-per-motor