Merci Laurent 
Il faut dire que je ne connais pas trop environnement Arduino et ses possibilités. Je ne parle même pas de programmation, mis à part le Basic il y a 40 ans et le langage de ma calculatrice programmable que je n’ai pas utilisée depuis de nombreuses années, je suis largué.
En fait, on a un fil très instructif, ou il y a eu beaucoup de développement de la part de certains d’entre vous pour le bien de la communauté. On est passé du début, un module TTGO Tbeam à 25 € à des ensembles coûtant moins de 10 €, voire 2 € si on récupère les datas de son GPS Naza ou MSP. Par contre, c’est disséminé un peu partout, et pas toujours facile de faire le tri, surtout pour les personnes comme moi qui découvrent tout ça.
Hier, j’ai essayé de programmer mon module ESP 01 (https://fr.aliexpress.com/item/32808738325.html), mais je n’y arrive pas. Après le problème de la librairie manquante, c’était le choix de l’ESP qui n’était pas le bon. Il fallait choisir ESP8266 et non ESP01 dans la carte Arduino. Bref, plein de petites conneries du genre, qui font que ça marche pas. Choses évidentes pour les initiés, mais beaucoup moins quand on découvre.
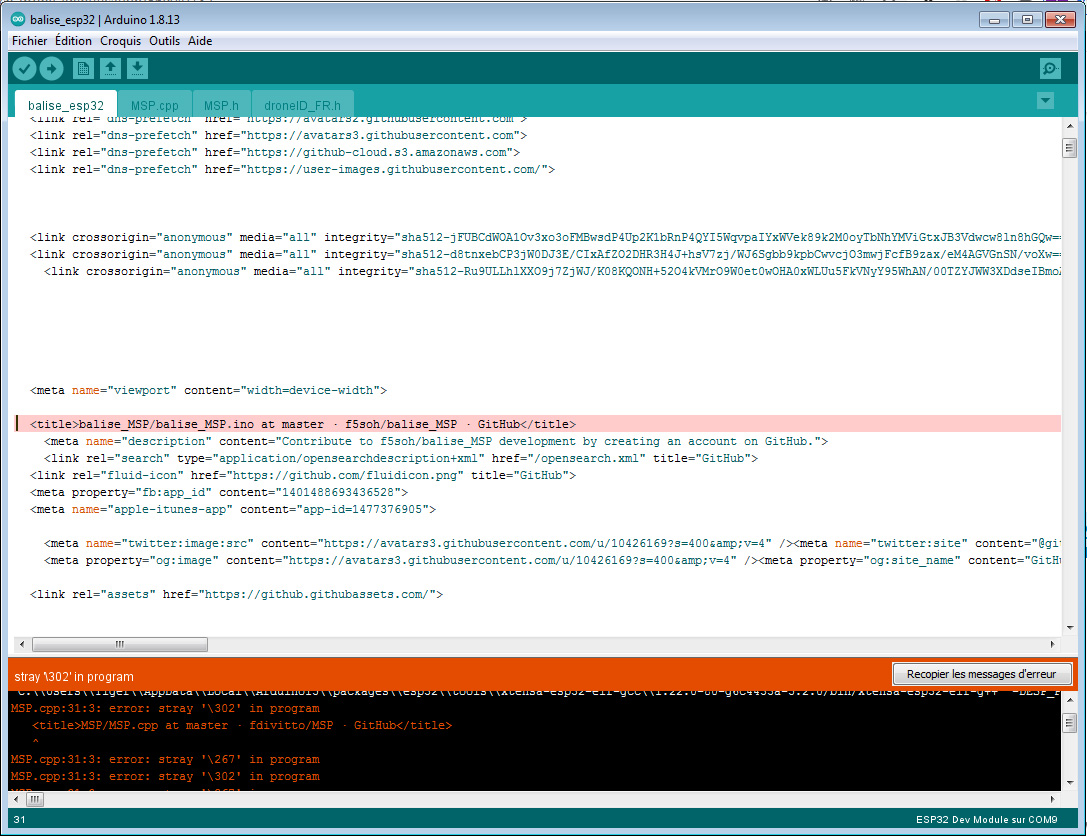
Je ferai bien un tuto pour chaque modèle et application pour que tout le monde soit capable de faire soit même son module, mais je ne suis pas sur de mes informations et méthodes. La preuve, si maintenant, grâce à toi, j’arrive a vérifier le code, j’arrive pas à le téléverser dans la carte. Ça plante. J’avais oublié d’installé le driver USB serial CH340, puis après, c’était pas le bon port USB. Maintenant, c’est bon, mais ça plante encore. J’ai bien glissé le switch de mon programmer sur “prog”, mais j’ai le message d’erreur :
" esptool.py v2.8
Serial port COM13
Connecting…………………____Traceback (most recent call last):
File “C:\Users\Tiger\AppData\Local\Arduino15\packages\esp8266\hardware\esp8266\2.7.4/tools/upload.py”, line 65, in
esptool.main(cmdline)
File “C:/Users/Tiger/AppData/Local/Arduino15/packages/esp8266/hardware/esp8266/2.7.4/tools/esptool\esptool.py”, line 2890, in main
esp.connect(args.before)
File “C:/Users/Tiger/AppData/Local/Arduino15/packages/esp8266/hardware/esp8266/2.7.4/tools/esptool\esptool.py”, line 483, in connect
raise FatalError('Failed to connect to %s: %s' % (self.CHIP_NAME, last_error))
esptool.FatalError: Failed to connect to ESP8266: Timed out waiting for packet header
esptool.FatalError: Failed to connect to ESP8266: Timed out waiting for packet header
[/details] "
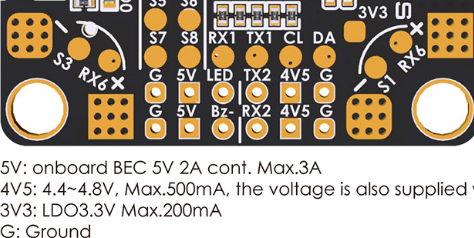
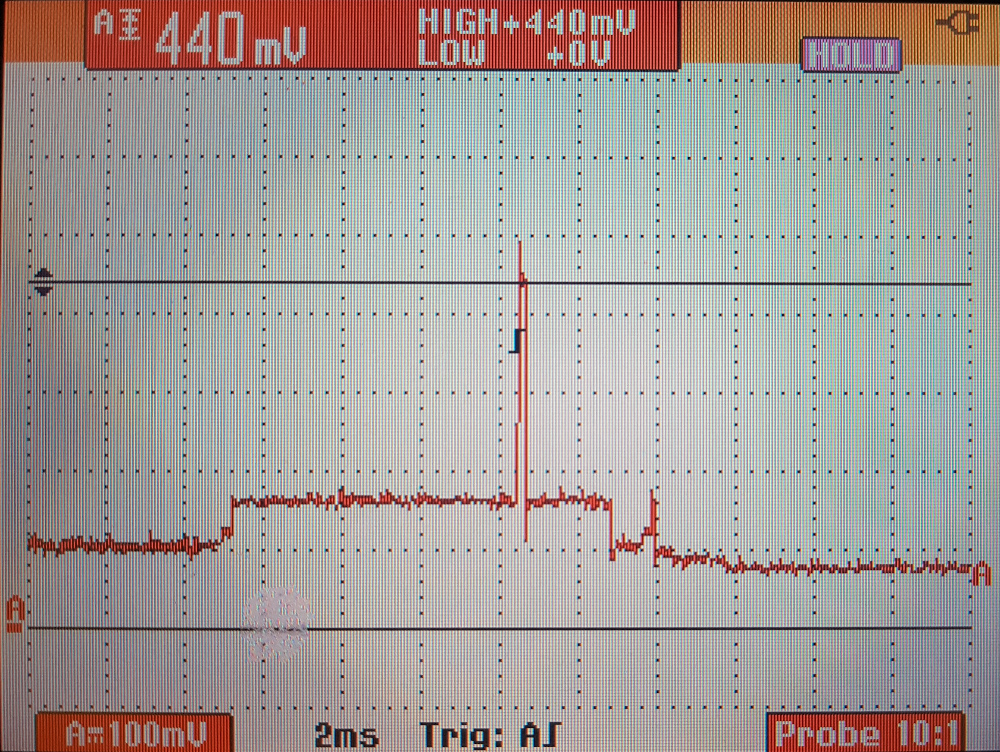
J’aurai bien aimé au moins essayé sur son adaptateur. J’attends mes AMS 1117, mes résistances CMS et mon ESP32 pour vérifier les trames. J’irai chercher les condo chez Lextronix à coté de chez moi (ils ont pas de CMS et les AMS 1117).
En tout cas, merci de ton aide, mais aussi de ton ceux qui travaillent pour avoir des balises qui nous permettront de continuer à voler, sans debourser 120/150 € par module, mais seulement une petite dizaine. Ça change la donne