@ppoirier so here it the solution for me (s)
As my serial cable link was as “bad” as the SIK air links 433Mhz ,915Mhz and 2.4Ghz i started to suspect my serial port Telem.1 .
I switched from 1 to Telem 2 and most of my airspeed problems where gone , i can’t really say why …port settings are the same apart from the serial pass settings.
After this “huray” moment i ran into a different problem .Regarding the luna’s Below the settings that worked on USB-> Pixhawk previous.
On Telem.2 this did not work , RNG3 &7 where mixing up all over…an where only one at a time could be seen on Mission-planner and an alarm "sensor x not found sounded on and on ( even sensor that i saw moving on screen)
So next thing i did was giving the sensor with the well know Arduino script again new addresses.
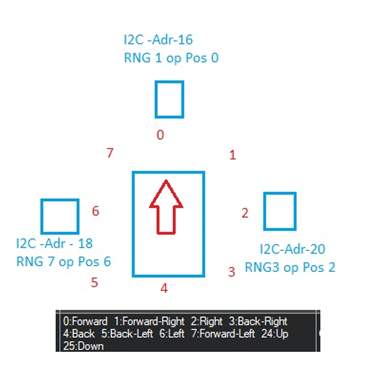
But this time clockwise 16->18>20 ( more logical ).
Still the same problems existed .
Last option was for me to try to change the order in Mission-planner so RNG1->16 RNG2-18 and RNG3->20 and point these in the right direction…
This is the result !,3x Luna’s on 100Hz and on 915Mhz , 57600 bps , airspeed 64. ( so some room left to improve ).
However i’m more leaning towards reducing some of the Hz of the Luna’s.

@ppoirier ,
@DonLakeFlyer
@rmackay9
there is still one issue.
The directions (mounting place ) in Mission-planner and Qground-control aren’t the same !. This can have huge consequences on where the drone wants to avoid the collision ?!.