Geez that thing looks massive (and heavy)!. If you could make it out of foam I bet you’d be able to take off. I’m flying a super lightweight one with an EDF and it eats battery like crazy. Flight times of 1 min with graphene battery 
Wow.
Ya it was huge and never got off the ground, but since then I have learned more about 3d design and printing so imagine I could do it a lot lighter.
1 min flight time WOW
Coax Copters and Balance Bots. Interesting projects to keep one occupied, learn something or a use for spare parts but not very practical.
NGL, I think one of the rare strong point of the single/coax frame is the battery life / efficiency. They are nonetheless not practical at all.
Because a single copter only has one propeller, the prop is very wide and a wide prop means a higher efficiency. Mine (that was far from perfect) had a single 10inch prop for 900g and flew for 10 min (4S 2500mAh battery). With a quad you cannot use 10in prop with only 900g and such a small form factor (the height clearance is pretty bad though).
A 7in quad is better though if you are looking for not huge and long range. But if you are limited by weight, by for example some new laws, and want high efficiency, a single or an helicopter could be the solution.
I have a sub 250g 5" that I fly with a 3200mah Li-ion with flight time of almost 30 minutes.
wow I didn’t know that was possible, thanks for the info. Do you have further info on your build ? Like a post somewhere, I’m just curious (don’t bother searching 'sub 250g 5" ’ on google I’m already doing it ; )
Scattered around the forum there is. But here are the details:
BetaFPV 1404-3800kV Motors
3 blade 5x2.5 props (low pitch is the trick here)
Aikon 4in1 ESC
Matek H743-Mini FC
2S 3200mah Li-Ion
238g
I have flown it on 3S with 4" props also.

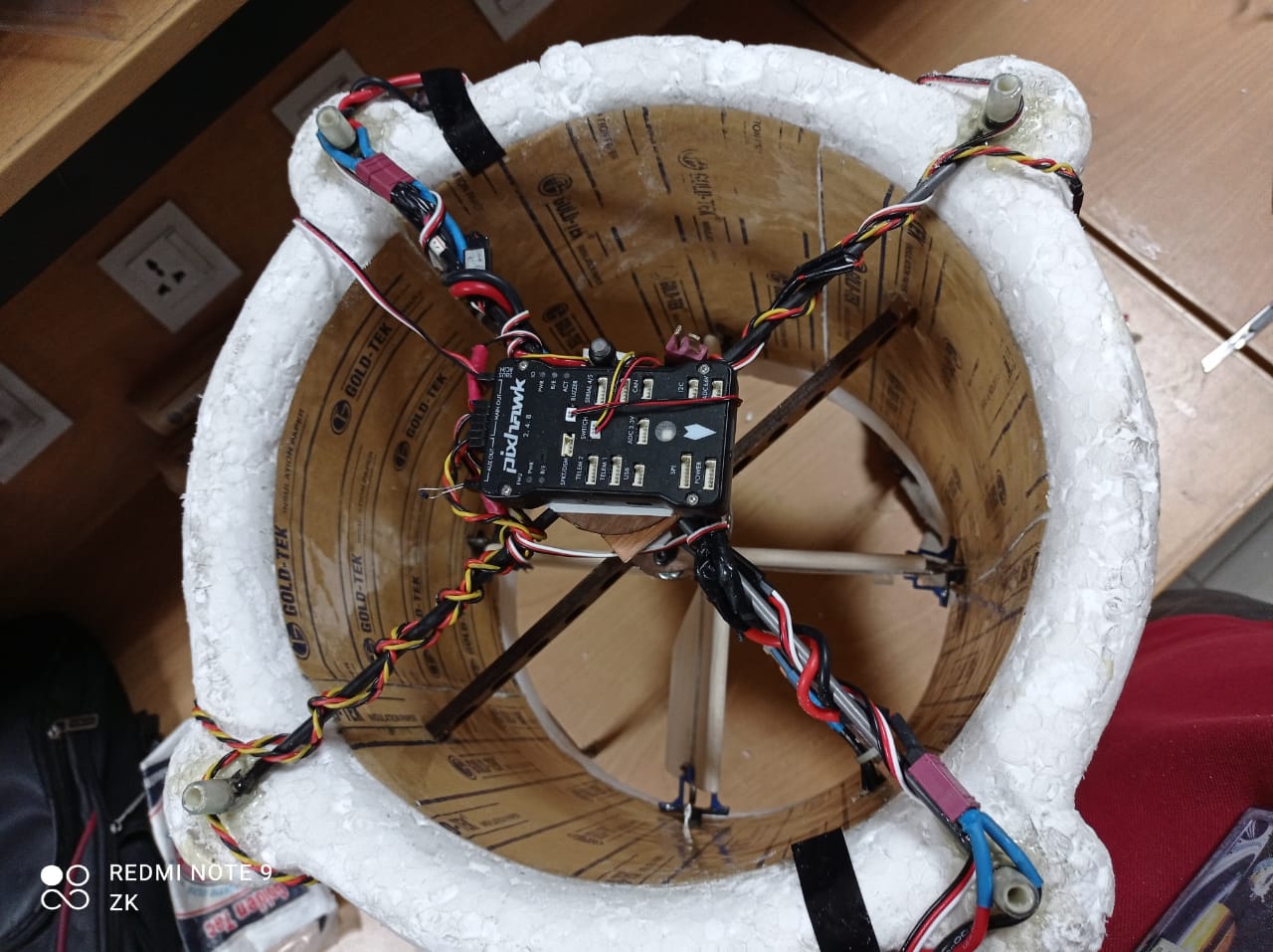
Dear Paul Well I am facing a problem with the test flights. as you can see that the drone is completed. but every time I try takeoff. it always topples to one side. I have labelled the sides with left and right, and I noticed it topples mostly to the left but to the right. I tried to recalibrate mag and compass. and I even tried changing the stick movements of the transmitter, to check if they were giving opposite response. but it still didn’t help. so can you help me pin point the problem, as to what can be the issue. Log file is attached and video in the google drive is also attached https://drive.google.com/file/d/1szmLQm6yyG_34wD8hghWRWmrUA7uzSyU/view?usp=sharing
Regards
log_25_UnknownDate.bin (369.3 KB) Abdul
Abdul,
Couple of things to try:
-
Use more power to lift off. Maximum stability is maintained at high power with more air rushing through the controllable vanes.
-
Add wider legs to the landing gear. I rarely had it land and stay upright until I made a wider, more stable landing gear.
-
Make sure the prop directions are exactly as described in the Arducopter instructions, and make sure that the vanes are correcting in the proper directions.
-
Try hanging the machine from the ceiling on a string. With enough power on you will be able to tell if it is stabilizing correctly, and the string will keep it from falling while you test.
Paul
1 Like
Dear Paul @flyingw
Yes i have checked all the things from the posts. followed all the guidelines even the first test flight seems to be successful i have attached a google drive link you can see from that and pictures of ducted fan also attached but the second test flight seems disturbing it is drifting and then after drifting it lifts off slightly dont know what is happening to it i have attached the pictures of My Drone and first flight video in google drive link

You can see from video it is stabilizing but when we did second flight it topples and drifting as i had told you earlier
https://drive.google.com/file/d/1Q70ek8QPT6oQdgdMYSOsJmDjsQ1CgkVX/view?usp=sharing
Does the vehicle still show that it’s level in Mission Planners HUD before a take off attempt?
1 Like
Ok, it seemed to fly well in the first video. When touching the ground, the fins cannot stabilize the craft. That’s why it is always challenging to get it off the ground. You have to yank it off with a burst of full power. Once in the air, the fins can tilt the craft and achieve stability.
How does your machine achieve yaw control?
Did you change the location of the battery after the successful flight?
1 Like
Yes it shows it is level but my vehicle drifts. Dont know why it is doing so?
@dkemxr
i tried giving it throttle quickly but then it would topple more earlier. in case i slowly raise the throttle then it starts to drift forward and rightward,and to cancel it i give stick input. and thats how it flew the first time but now i cant acheive the same . dont know the reason.
its yaw is acheived by differential thrust as i have seen the motors speeding up and slowing down while i give yaw stick from the transmitter. also i saw a little bit of control surface motion with yaw stick that i didnt quite understand.
no we didnt change the battery position,its still the same as first flight.
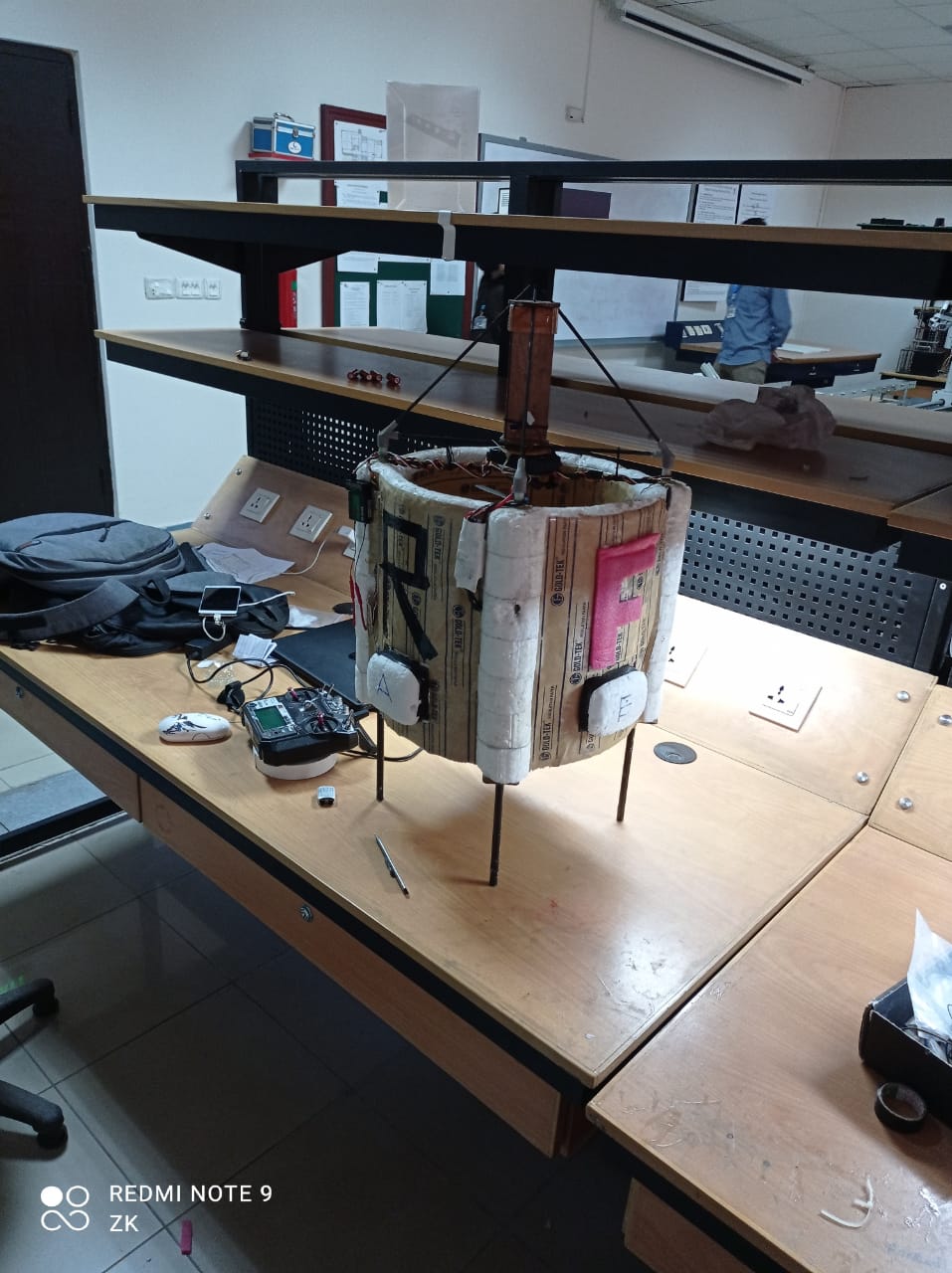
Try hanging it in a string a few feet above the ground. Power it up and advance the throttle until it is bouyant. Check that it is stabilizing correctly.
1 Like
Dear Paul,
Kindly check out this flight i have attached the video the link is in google drive kindly check this out. I have a question regarding this that it need auto tuning or not by visualizing it kindly check this out after many errors i got this successful flight @flyingw
https://drive.google.com/file/d/1-zyOzm3JFcVsBmOcsN22tGHLKPrFJ6Hf/view?usp=sharing
Regards Abdul
All,
Very interesting developments in this topics.
Is there any progress made after the last post?
Regards
Bart