Yeah, this bird has flown more than a few dozen times as a fixed wing.
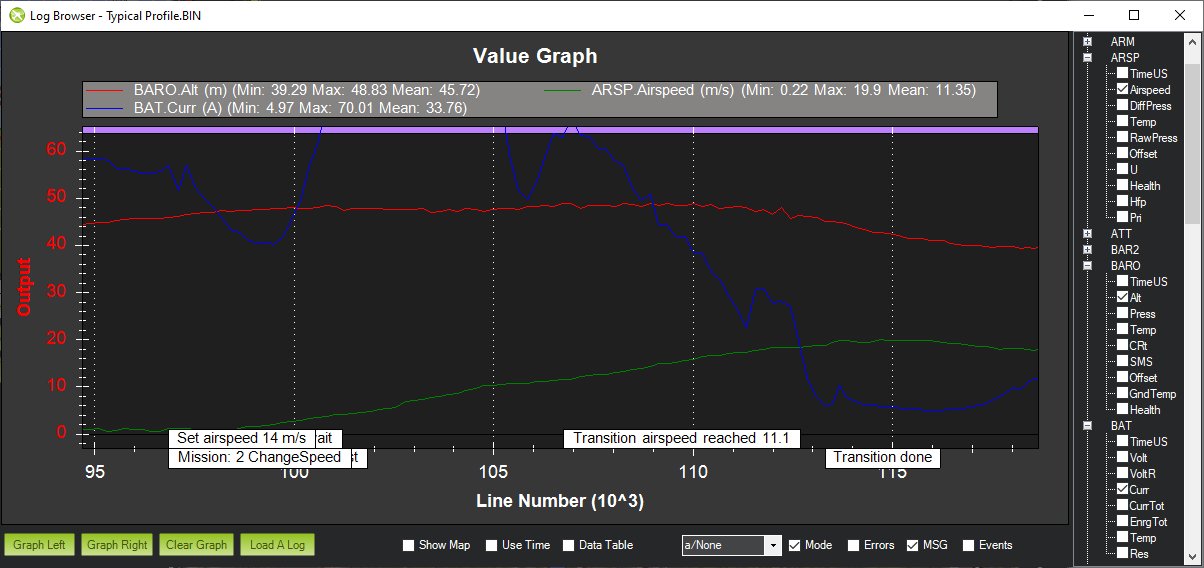
Winds aloft started at 4mph on the ground and by the time it reached 150ft they were 14mph, during transition it dipped to 12mph. None of those wind conditions should have stalled it…
When it was on the way down I could tell from the ground that it was not normal behavior so from the RC controller I was pulling max up but of course, it did not seem to respond.
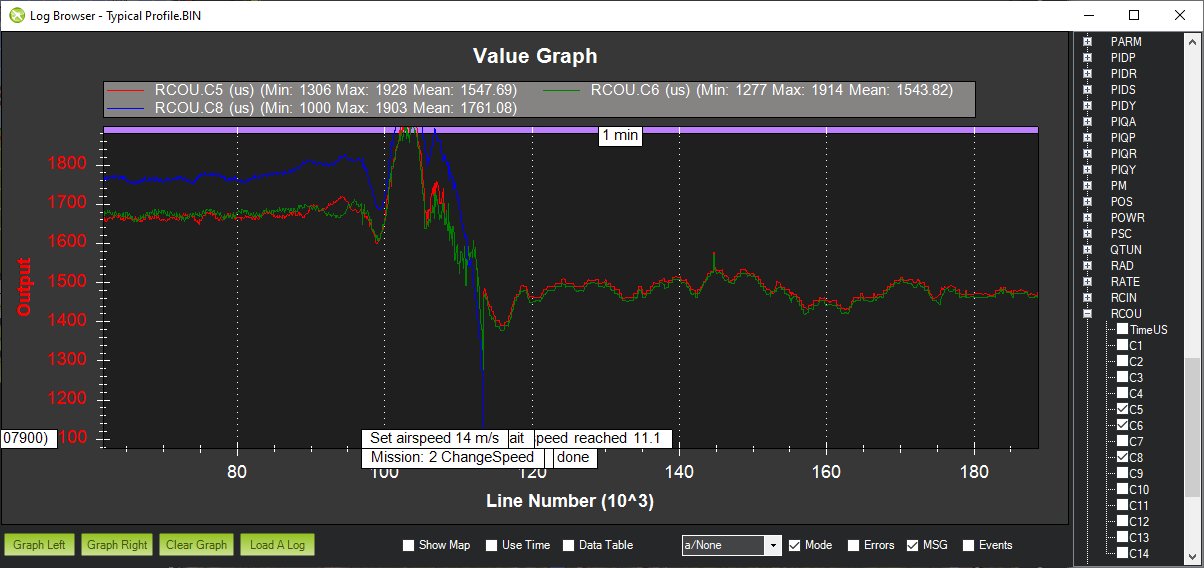
The speed being 55mph (25m/s) is consistent with other flights as during the transition she eats .5V out of a healthy battery. Being a twin engine she can get some speed going. It’s that speed buildup that makes me always put a do change speed command to 32mph, else she gets close to the overs peed condition in short order.
I don’t remember what she weighed but its around 10 pounds iirc. At 32mph she flies with a 15deg nose up angle.
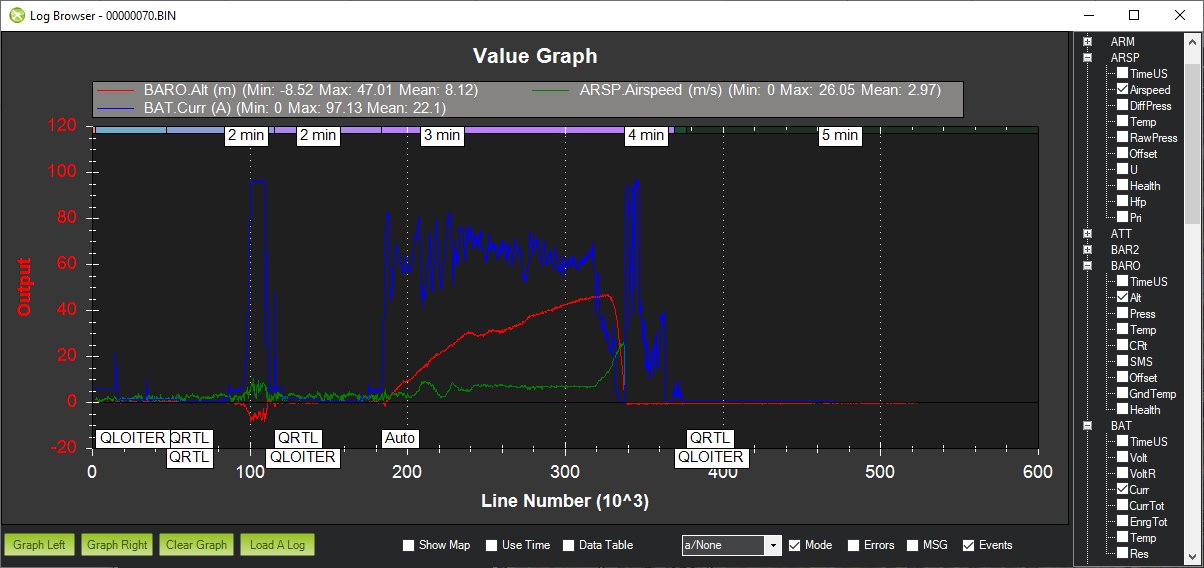
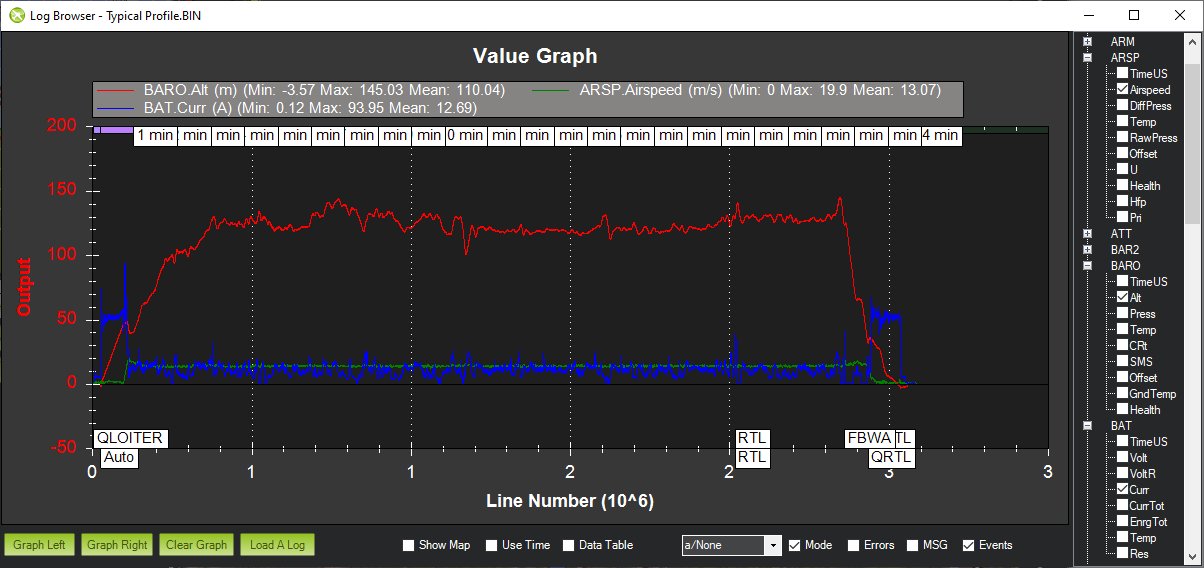
On my RC transmitter I have a three position switch, QLoiter, FBWA and RTL that is on the right. On the left I have a two position switch that only activates QRTL mode. Since I fly in places that is crowed by trees and/or obstacles I find that letting it circle overhead until I am ready and then switch to FBWA, get her to fly in close by hand and then manually trigger the landing is the best way to handle her.
Yes, I can only institute AUTO mode from the GCS, I can’t justify bumping the transmitter into AUTO mode by accident. This also ensures that I have telemetry setup and running before it can go into AUTO mode as well.
NEW: So, what about this? During setup the left wing aileron was bumped by me and it stuck in a full down position. I thought I hit it hard enough to strip the servo. I manually put the aileron back into position, tested all flight control surfaces and it behaved perfectly.
During the post mortem I was curious to see if that could have been the cause. I dismantled the servo and inspected it. All gears were fine (perfect, had a small bit of oil on them still). By perfect I mean the gear teeth all meshed and none were broken/missing. No foul odors, nothing physically wrong with the circuit board. I then put the control horn back on and moved it to see if maybe the plastic side got its spline shredded. If fully engaged I could not make her skip splines. If partially disengaged but still attached to the servo she would indeed jump splines.
SO: Could the servo screw attaching the control horn to the servo have vibrated loose over time and the left aileron got stuck in an abnormal position, say a nose down position) and caused this crash that way??
EDIT: I just hooked the servos back up to the receiver and they appear to be just fine. No skipping, no abnormal noises and I can’t make them move while pushing them with my finger with a fair bit of effort. Control horn was fully engaged for this test.