I found this in the Ardupilot github issues list. So, if you start Auto mode from the ground, and don’t have a takeoff command…you die.
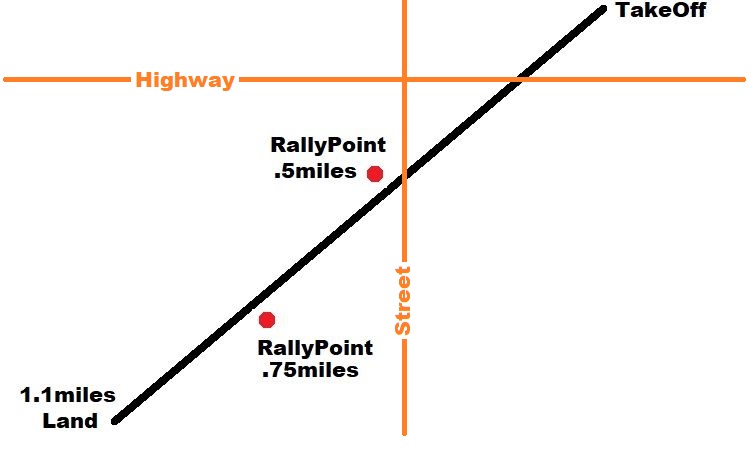
Thanks for the info . . . this is my planned mission as a first try at seeing how far I can get one way and land with no return. The Rally Points and landing point are accessible but nowhere else on the route. If successful, I’ll keep adding distance as my goal is a location 2.2 miles away if at all possible on the stock battery. I set the altitude to only 30’ to use as little battery as possible and added Rally Points for insurance. What parms could I tweek in order to get maximum distance?
Lastest newb problem with Mission Planner . . .
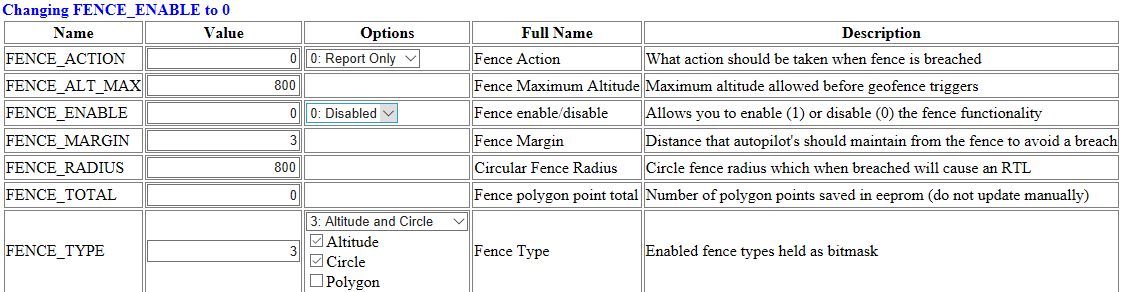
The SV keeps RTL even though I have FENCE disabled and I’m transferring to AUTOMODE right after launch (thank you lordneeko). I even changed FENCE_ACTION to Report Only.
Questions:
- Do I need to have the SD card inserted on missions out of Tx range?
- Do I need a LAUNCH command in the mission . . . if so where would it be, at Home Location or a few meters from it?
- I want to LAND approx 850 meters away, should the LAND command be enough after the last waypoint, if so should the last waypoint be close to the LAND location?
- After I power cycle the SV, the FENCE_ENABLE . . . 0:Disabled reverts back to 1:Enabled
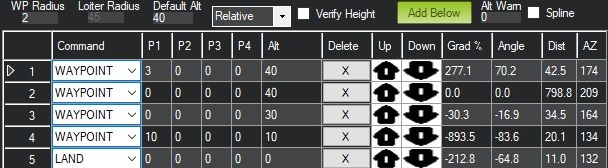
The mission is to takeoff-fly approx 850m @40’-descend to 30’ then to 10’ and Loiter for 10secs then Land 9m from this last waypoint.

It isn’t RTL because of fence. It’s because it’s out of transmitter range. There is another param to change to continue auto mission if transmitter lost
http://ardupilot.org/copter/docs/parameters.html#fs-thr-enable-throttle-failsafe-enable
1 Like
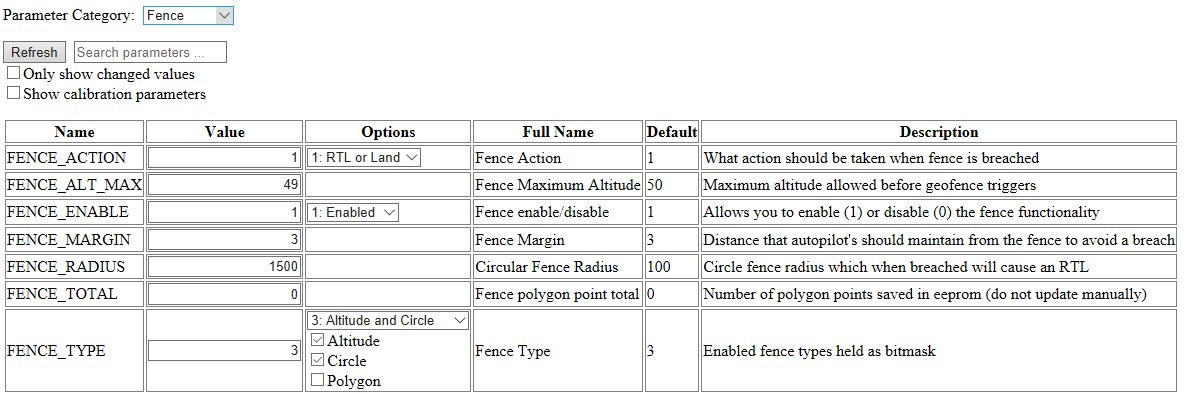
You are a good coach . . . but since I’m new at this it’s hard to tell what is normal and what isn’t . . . for instance the FENCE being disabled by me and then it changing back to enabled when I query the SV.
(see pic) since there is no SAVE button I would assume all changed values would save when I exit?
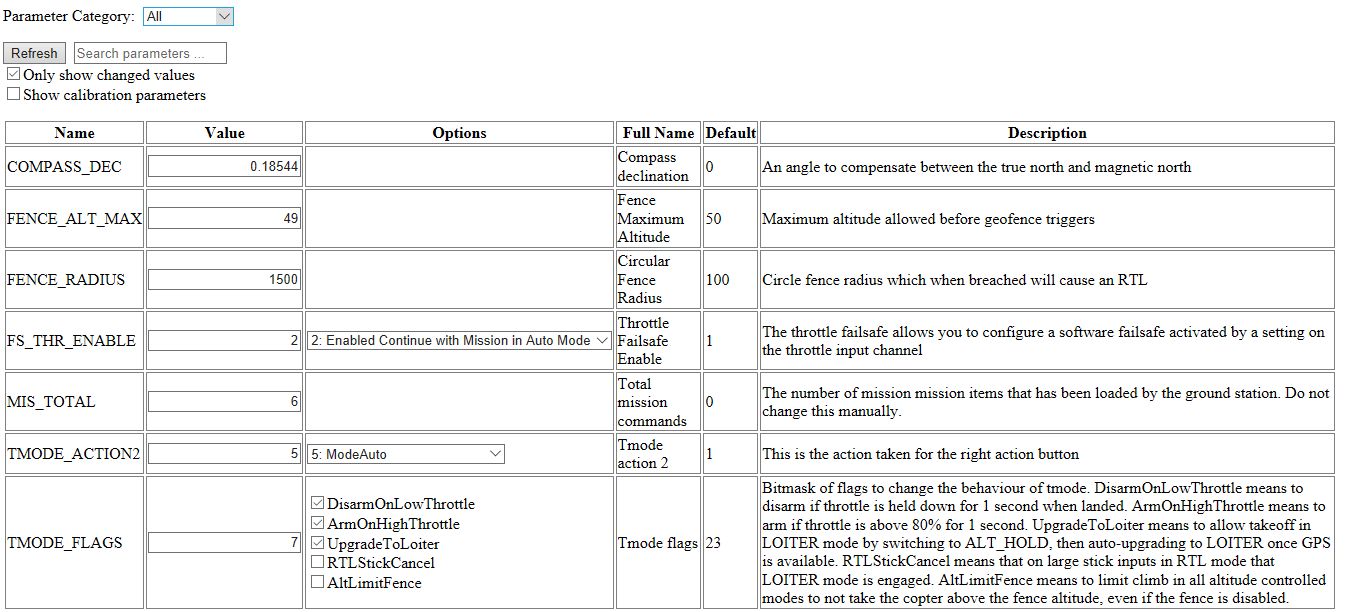
So just to be on the safe side I jacked FENCE_RADIUS to 1500m (not knowing if extra high numbers are even read) All this is moot if FS_THR_ENABLE takes over and overrides everything else?

1 Like
Fail safe checks (ideally) are the last checks performed. That way, no matter what, they will catch a failure. When the transmitter is out of range, throttle goes to zero. Then this FS triggers.
Yes others have noticed that the SV’s fences reset at power up. Must have been something they coded in extra. I don’t see that though because I’m running AC master, rather than the SV firmware
Don’t know what I’m missing . . . but the SV keeps RTL on missions well out of Tx range (1500 ft).
All I have been changing is:
TMODE_ACTION2 . . . 5:ModeAuto . . . Depress right action button after takeoff
FS_THR_ENABLE . . . 2:Enabled . . . Continue with Mission in Auto Mode
. . . and I still get FENCE warnings.
hmmm…not sure then sorry. Keep playing with it! 
Regarding LOG FILES . . . can they show me why a mission on Auto does a RTL out of Tx range?
Along those lines . . . after Takeoff . . . should I be giving it some throttle after TMODE_ACTION2 . . . 5:ModeAuto? I have been just launching then hitting the action button.
Failsafe triggers are indicate din the log as “Errors”. Fence triggers are indicated as “Messages” Turn those things on in MP to see when they triggered.
Once you switch to Auto, you can be “hands off” unless you want to change Yaw or override the mode.
No errors and no msgs on this one . . . got another SV and everything works as it should . . . maybe
ALL SVs ARE NOT CREATED EQUAL
By the way, I found this post by @tridge on RCgroups
https://www.rcgroups.com/forums/showpost.php?p=38460778&postcount=59
Apparently the Toy_mode actually FORCES fencing, no matter what you set on the parameters. But, according to Tridge’s post, only when you use the transmitter to set the mode. So potentially, you could set the mode with an App (QGC, MP, or Tower) instead of assigning a button on the transmitter. That might help you.
Help! I have been trying to get auto missions a try , with zero success. Tower crashes tablet, Samsung Tabl A, everytime I try to connect it with SV.
Qground I can conect but when I try and upload way points only the first one or two seem to take it I get vech did not request all mission targets msg . .?.??? I’m clueless
i assumed you followed all this?
http://ardupilot.org/copter/docs/skyrocket-gcs.html
You have to change some settings to get it communicating (correctly) with other GCSs other than Mission Planner
Response to old post, but just for reference …
Resolved a couple weeks later ![]()
1 Like
Mission planer question , Tower on Android really . What would happen if launching from 80 ’ above ground level , then having first target 50 yards away with a mission altitude of 150 ’ . . My balcony @ 80 ’ faces a large park area , so launching from home and going to auto . Will drone climb to 150 ’ or 230 above ground . , ?.
230’, what matters is barometric pressure from launch, in that case 80’.
You could also verify this by starting in alt hold or loiter, then push right stick up. The Viper will maintain altitude.
2 Likes
Thanks , for that I thought it maybe used relative altitude . Is there a way to make it use an absolute value or take its value from 3d gps data, I wonder?
Joe, you could use SRTM terrain data , but it would be far from precise compared to using the baro. Likewise using GPS only wouldn’t work well, GPS altitude precision is not very good. A rangefinder would get you absolute distance from ground but hard to think of how integration could be done on a SkyViper, both from a weight and connection perspective.
Not sure what you are trying to do, but note that you can use negative altitudes on an auto mission. So unless you need precise terrain following (for which a rangefinder would be needed) I can’t really think of a situation where navigating with relative altitude (from take-off point) would be an issue.
1 Like
Thanks Oliver , I had no particular reason , other then trying to figure out autopilot logic . I live at the top of a plateau overlooking a large lake on West side and a Ravine, that is a , was a hunting preserve for Prince Edward in 1750 it has a large man made heart shaped pond built then plus a large round cottage built for the princes mistress , where the park meets the shore of Bedford Basin in Halifax . So I was wondering if I could plan a mission to fly from my balcony to the pond which is 250 feet lower in elevation video it and return home 1.2mile . Round trip Minimum safe alt above trees is 55 feet and 125 feet with in 250 yards of my bld. I don’t know if it could make that distance though . I did a test mission yesterday in 200 yard legs changing in alt from 150 ’ 65’ & 45’ multiple times that was a bit father and it took 8min with a 3.5v charge left when it landed . Other then a really blury video it flew better then it ever has . All the large wobble is out of drone but video is worse . I think maybe props need balance but I don’t have a balancer . I’ll look for a make your own maybe see if that works or perhaps just switch them with a bunch of the spares .