So I have a quadcopter about 6 lbs that we are trying to fly. I have attached the parameters on this message and some test flight logs that we have had. We can not have a successful autonomous or manual flight. We do not think it is stable but we dont know what is going wrong so I am reaching out. If you need any specifications on the hardware I would be happy to give it. We have been trying to fly in the wind and out of the wind due to our competition might be windy. We have just tried to run a mission that takes off to 1 meter and RTL but the drone will take off smooth and then just go crazy. Any advice will help!
I looked at your logs but I can’t do much with them because they aren’t in .bin file format. However from the parameters alone I can see that you are missing a lot of vital calibration/configuration and you shouldn’t be trying auto missions yet.
Examples of what is missing (including but not limited to):
IMU temp cal not done
battery monitoring not configured
you are on default values for initial tuning parameters
MagFit not calibrated
Also please descibe your machine a bit. I can see you are using Pixhawk 6C but nothing else specific. Are you really flying PWM ESCs?
Have a look at the How to methodically tune (almost) any multicopter using ArduCopter 4.4.x guide and do all the steps youd didn’t do so far. Download the .zip folder with the .param files from the guide, edit each file to suit your copter and upload them one by one as you read along. The guide tells you what to do and which file is needed at any given time. Do not skip any steps! Anything that might seem like a shortcut will result in a worse tuned copter in the end (like it is now).
P.S.: I changed the category to “Copter 4.4” since you are on Copter 4.4.4
Thank you for the guidance I will look into this in detail! And here is the link to my esc they aren’t fancy because we are on budget and time restrictions.
On the initial tune parameters for a 6s lipo battery what values would I enter? It’s a 5000 mah battery 22.2V 50C. And is the air screw size the blade size?
@Janno@Allister I was trying to do a stable flight but throttle was over 50 percent and it never left the ground here is the bin file. Any suggestions? I have done everything on the link sent to tune up to the first flight.
Here you go I am sorry it took so long. Most of these parameters I do not know what they mean so most are default. I didn’t just copy and paste your parameters in because I know some are different with each drone. I am very much beginner in drones, just trying to get through this senior project so I am sorry if most of this sounds rather ignorant.
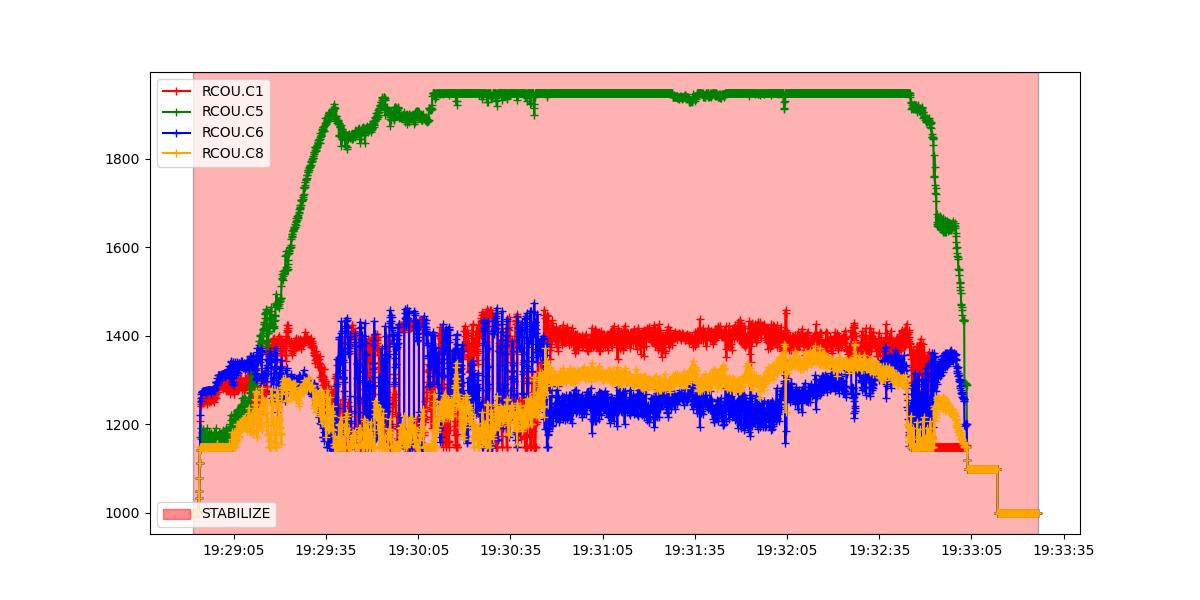
There’s a bunch wrong here. Motor 2 (RCOU.C5) is maxing out, while the rest are still low. Make sure the prop is on the right direction. Make sure it’s properly secured. If one of the motors is hitting max, and the other 3 are still so low, the quad should be flipping over. This is some kind of mechanical/electrical problem. Not likely configuration.
Another thing that will cause this is if the drone is tethered to the ground. If that was the case, all of this is invalid and a waste of time. A tether will confuse the PID controller and make the data useless for troubleshooting and tuning. Please tell me the drone wasn’t tethered or otherwise restricted when you tried the flight.
@Allister Thank you very much for your input. I will look into this. It wasn’t flipping but it was spinning in circles. I will get back to you with what I figure out! And no it was not restricted it was free to fly wherever!
@Allister based off of Setting Motor Range — Copter documentation (ardupilot.org) I set my motor arm to .06 because the lowest the motors ran in motor test was 4 percent and then motor min to .09. I tried to fly stablilize again after figuring this out and got the exact same graph as you sent me. I looked around and they said that it could be esc or motor or blade. Each motor direction is correct with the correct blade. I decided to change the original esc on motor 2 to another motor and the same problem occurred as before. The drone doesnt get a few centimeters off the ground and starts spinning. Am I right for assuming I have a faulty motor or what should the next step be? I have made sure all connections are plugged in also.
I’m still convinced it’s a mechanical/electrical issue. If you moved the ESC from motor 2 to a different position and the problem has stayed the same then that’s good to identify the trouble is not there and we can rule out the ESCs. We still can’t rule out motors, or wiring. If a motor has failed or has issues you should notice something in the motor test. Does one of the motors sound different from the other three? Play with the motor test tool and run the motors in different speeds. Run the motors together, and in sequence. Listen and feel for issues or anything different. You could also swap motor 1 & 2 and see if the issue moves. They spin the same direction so that should keep the prop and load consistent.
I see the arms on that frame are on round tubes. Get really picky on making sure they are level with one another. Not just eyeball, but get a straight edge and take some time to make sure everything is lined up properly.
@Allister I switched motor 1 and 2 physically on the drone and still had problems with the rpm maxing out just on motor 2 position (meaning after the motor switch the motor 2 in configuration is still having problems.) So I switched the ESC again just to check and it still had the maxing out problem. All motors are in the right direction, each blade is secure, and the arms are stable. The only question I have is if I am using the quad x configuration shouldnt the drone be trying to flip over the front right motor (motor 1). Instead when off the ground a little it spins to the left. I also looked at the vibration chart and the vibration in the z direction was higher than usual. When doing the motor test, they all run smoothly and around the same rpm meaning nothing visibly shows that there is a problem. Where should I go from here?
With the ArduPilot X layout (1/2 CCW, 3/4 CW) the drone should yaw to the right when motor 2 (CCW) is spinning higher than the rest. So it yawing to the left sounds to me like a yaw imbalance, make sure that all your motors are perfectly straight on the arms und nothing is mounted askew/tilted. On frames with round arms it is especially easy to mess this up. I don’t know why only motor 2 is spinning higher though, if it was a yaw imbalance I’d expect motor 1 to also spin up to fight it…