Just looking at the defaults for heli in 3.3 this is what the RC8 settings were
RC8_DZ , 10
RC8_FUNCTION , 0
RC8_MAX , 1900
RC8_MIN , 1100
RC8_REV , 1
RC8_TRIM , 1500
Going to 3.4 we have sort of the same thing except the function is set to 31 (HeliRSC) by default
RC8_DZ , 10
RC8_FUNCTION , 31
RC8_MAX , 1900
RC8_MIN , 1100
RC8_REV , 1
RC8_TRIM , 1500
In 3.3 that function could be left set to zero and HeliRSC still worked. In 3.4 I don’t think it does - must be set to 31.
In 3.5 it was moved to SERVO8
SERVO8_FUNCTION,31
SERVO8_MAX,2000
SERVO8_MIN,1000
SERVO8_REVERSED,0
SERVO8_TRIM,1500
Also in 3.3 and 3.4 the H_SVx params looked like this (using servo 4 as an example)
H_SV4_DZ , 0
H_SV4_MAX , 1900
H_SV4_MIN , 1100
H_SV4_REV , 1
H_SV4_TRIM , 1500
which were moved to this in 3.5 and the H_SVx params are gone, no longer used (NOTE: this is from one of my heli’s with 3.5 so these values are not the defaults)
SERVO4_FUNCTION,36
SERVO4_MAX,1800
SERVO4_MIN,1150
SERVO4_REVERSED,1
SERVO4_TRIM,1550
In 3.5 HeliRSC can be assigned to any SERVO output by assigning the SERVOx_FUNCTION = 31. The same is true with HeliTailRSC by assigning SERVOx_FUNCTION = 32. So my question is, since in 3.5 the SERVOx_ params already carries min/max/rev values as shown above, why were these left behind in H_ params for HeliRSC in 3.5?
H_RSC_PWM_MAX,2000
H_RSC_PWM_MIN,1000
H_RSC_PWM_REV,1
These are the params you got rid of in AP_MotorsHeli_Single.cpp by commenting them out - just a screenshot here because the code probably won’t display correctly. This is from the PR where they are actually removed. In our dev code they are still commented out:
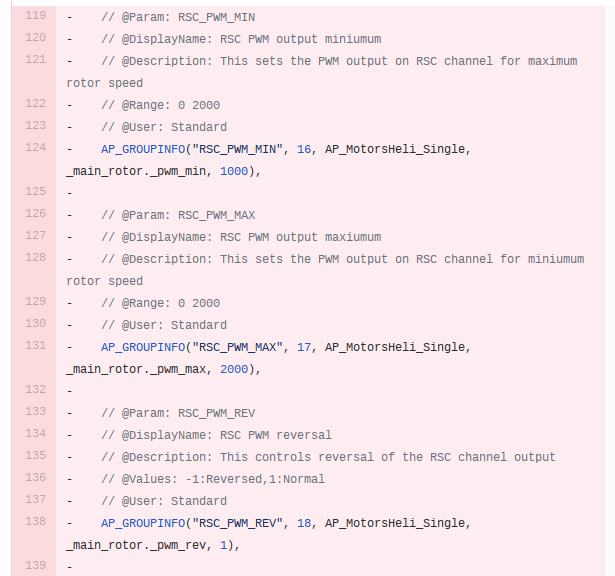
But why were they left there in the first place when the move was made to SERVOx_ outputs in the new library? Just an oversight? Or something we’re missing?