Thanks for all, the flight in altitude hold mode and there no defined failsafe setting or a rtl mode. I will share the param file when I get the vehicle
Velox V2306 motors with 3 blades props
What size 3 blade props? These are simple questions. We can easily determine if there is sufficient thrust/weight if you give complete answers.
sorry, with these props: T5147 2Pairs/Bag_Propellers_FPV Model_T-MOTOR Official Store - UAV Power System, Robot Power System, Model Power System
You are missing a lot of critical calibration and configuration.
Have a look at the How to methodically tune (almost) any multicopter using ArduCopter 4.4.x guide and do all the steps youd didn’t do so far. Download the .zip folder with the param files from the guide, edit each file to suit your copter and upload them one by one as you read along. The guide tells you what to do and which file is needed at any given time. Do not skip any steps! Anything that might seem like a shortcut will result in a worse tuned copter in the end.
Do this and report back if the problem persists.
Those motors come in 3 different kV ratings. Really spinning the wheels here.
I’ll try this, thanks for all
Hello again, I had the same problem again, unfortunately I did’nt provide a log file but this time I have a log. Can you help me?
00000042.BIN (522.1 KB)
You don’t have the same problem again, you still have the same problem.
From your log I can tell that you didn’t follow the methodic tuning guide. You are still missing IMU temp cal and MOT_THR_MIX_MAN, PSC_ACCZ_I and PSC_ACCZ_P are default. I didn’t look further after that to find more errors.
Do you want a drone that flies (aka is capable of lift-off) or do you want a drone that flies great?
If you want a drone that’s capable of lift-off, congratulations you are done.
If you want a drone that flies great, there is no way around the methodic tuning guide. I really meant it when I said “Do not skip any steps!” (hint: that’s why it’s bold).
I am not willing to put in the effort and try to help you if you aren’t willing to put in the effort and do what we tell you.
Of course, but I have not yet performed a tuning according to the guide you shared, the log file I shared is not a log taken after tuning, I tried to get a log file by flying to explain the situation better. So, this log was taken to better explain the situation to you (because the previous time I cant share a log with you), not to show the tuning result, I apologize if I misunderstood.
The next weekend flight I follow the tuning guide and I hope I can share the better results after it
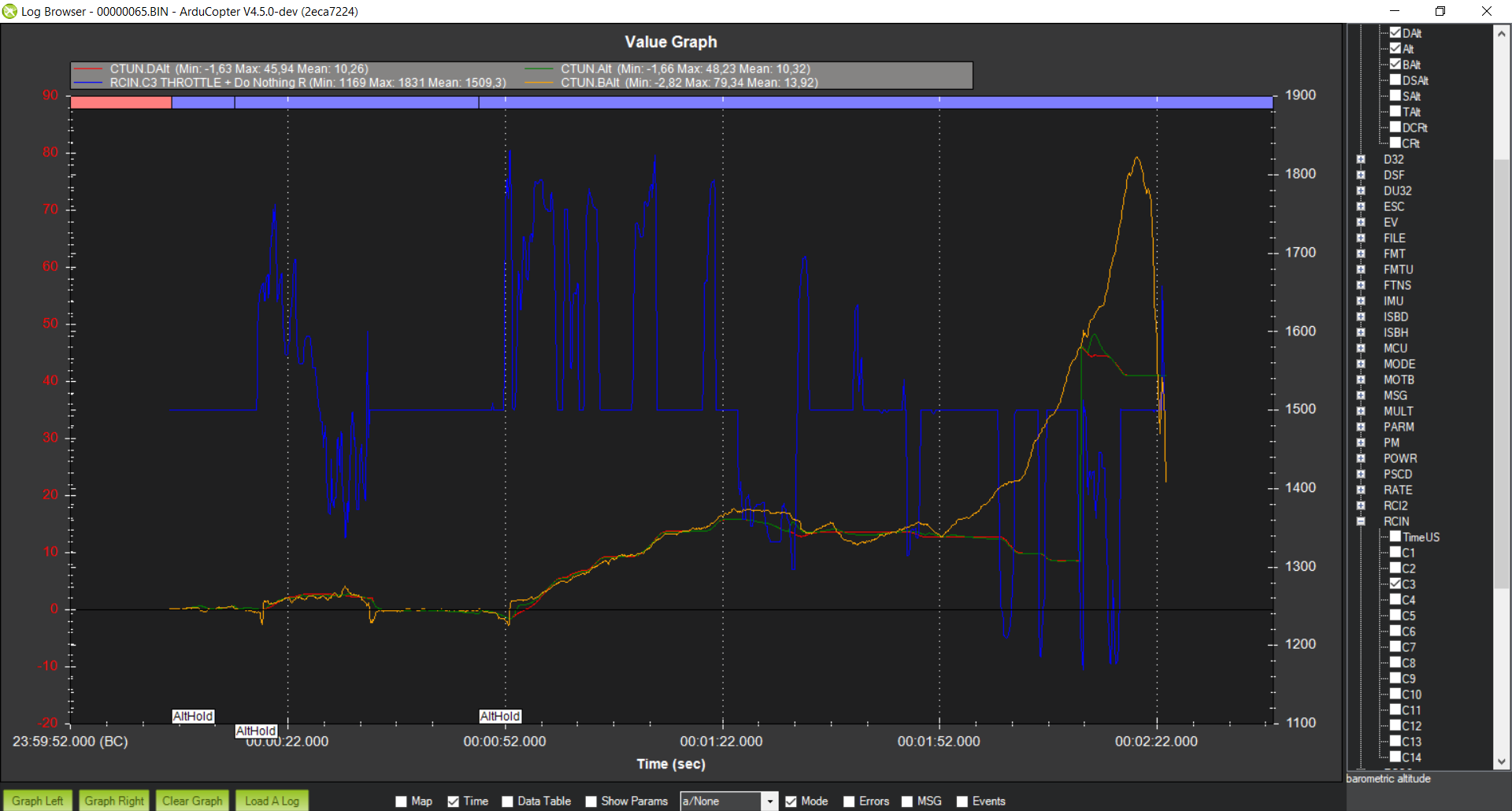
Actually, what I want to draw your attention to is that the “desired alt” in the CTUN section goes negative and I am experiencing such a problem in some flights in altitude hold mode. However, in the flights I made without any problems, the desired alt value is not negative, but a similar curve with alt and baro alt. Could my problem be related to this?
That’s another log file, when vehicle flies, the CTUN Desired Altitude jumps according to graph and in the flight, drone jumps up.
https://drive.google.com/file/d/1USnzdvxkFXAHN72Z7Gcxb_cTUd_A7RWJ/view?usp=sharing
Apologies if I was harsh, we see a lot of people who expect to get their drones fixed without them doing anything. Indeed, the log gives a better insight to what is happening with your drone.
And that is not good, you have a severe vibration problem:
- X-vibrations mostly around 40 - 50, with peaks above 60
- Y-vibrations up to 55 and never below 10
- Z-vibrations are good (surprising, usually Z-vibrations make the most trouble)
- 13k clipping events
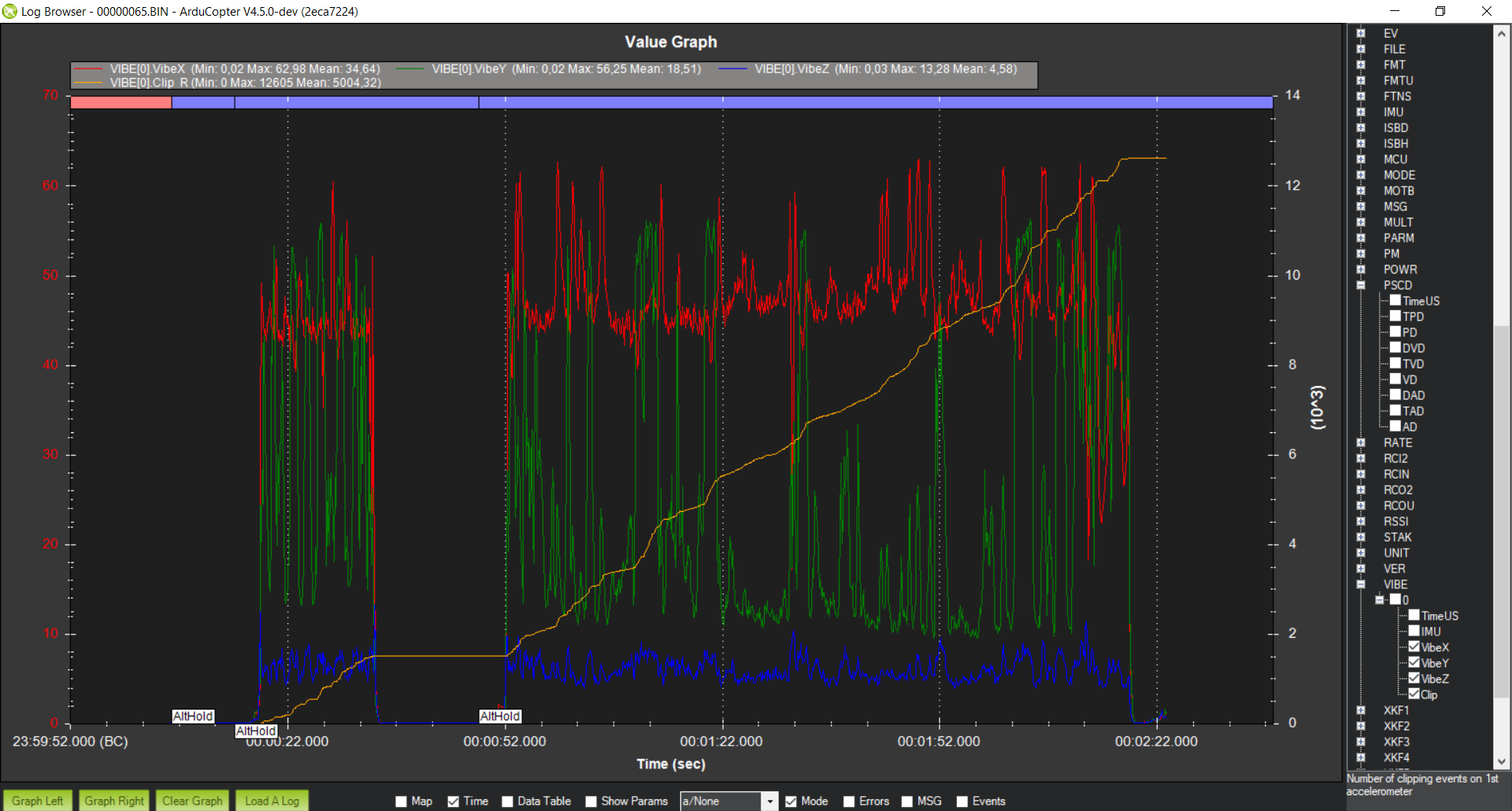
Fix this before you try to fix anything else. It is not possible to build a well flying drone with these vibrations.
You are right, the desired altitude (DAlt) jumps but the drone is ascending before that, at the jump DAlt and Alt just catch up to the barometric altitude (BAlt). What I think is even more concerning than the jump of DAlt is that Alt matches DAlt and not BAlt, which I would again attribute to the vibrations.
Also (as a sidenote) why are you on 4.5-dev? At the time you created this topic Copter 4.5 was already on beta4. And now you can even update to 4.5 stable when you start tuning the drone on the weekend.
Thanks for all, you explain as the documentation’s “vibration failsafe”, but I didn’t see a warning like “vibration failsafe on” as the mentioned as the doc’s page ?
I think I triggered vibration failsafe according to the page
To be honest I didn’t even know this feature existed.
It’s good to know about this failsafe in case of a real failure but I wouldn’t want to rely on it during normal operation. Not with something so predictable and fixable as vibrations.
At this point I wouldn’t hunt further for the cause of the drone’s behavior and I can only speculate past the vibrations. Hunt more if the problem persists after the vibrations are gone and the drone is properly tuned.
Thanks for everything, it will be better after fixing the vibrations and completing the tuning process ![]()
Any analysis of altitude problems once Vibration Compensation has been activated is pointless for this reason:
- The vehicle will not change mode but its altitude hold will be less accurate than normal. The vehicle may overshoot it’s altitude targets and/or respond more slowly to pilot input.
This FS is actually there to prevent a flyaway (to the moon) but it can cause problems of its own.
2 Likes
I think 15 second might be a long period for vehicle when rising full throttle
I think it doesn’t matter. You cannot advance without greatly reducing the vibe levels.
2 Likes