Anyway, if there is anyone here with an raspberry pi4 (or 3) here, willing to test if MissionPlanner will run on his raspberry, Michael and i would appreciate it 
i was testing on a rpi3, i found i had one. but i was using ubuntu, not raspbian at first.
then i switched to raspbian 9, ie rpi3.
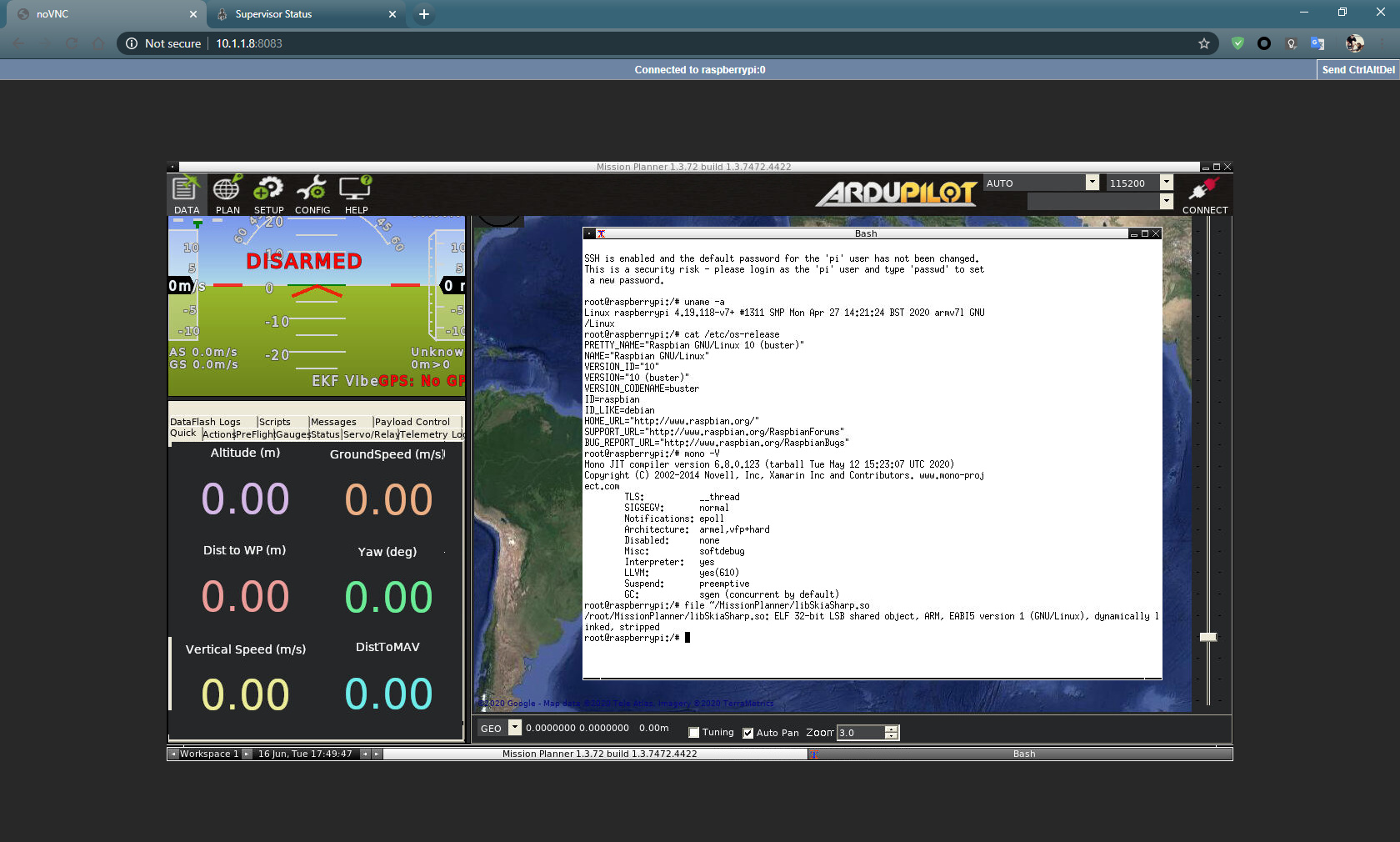
MissionPlanner - current beta
latest rasbian buster, latest mono with libskiasharp.so from https://github.com/meee1/jellyfin-skiasharp-native/actions/runs/135852411 using the linux-arm build
1 Like
I just don’t understand what i’m doing wrong.
Either i’m a complete muppet or something has significantly changed between raspi3 and raspi4.
I ran “ldd libSkiaSharp.so” to see if any dependencies are missing, that seemed to be ok however.
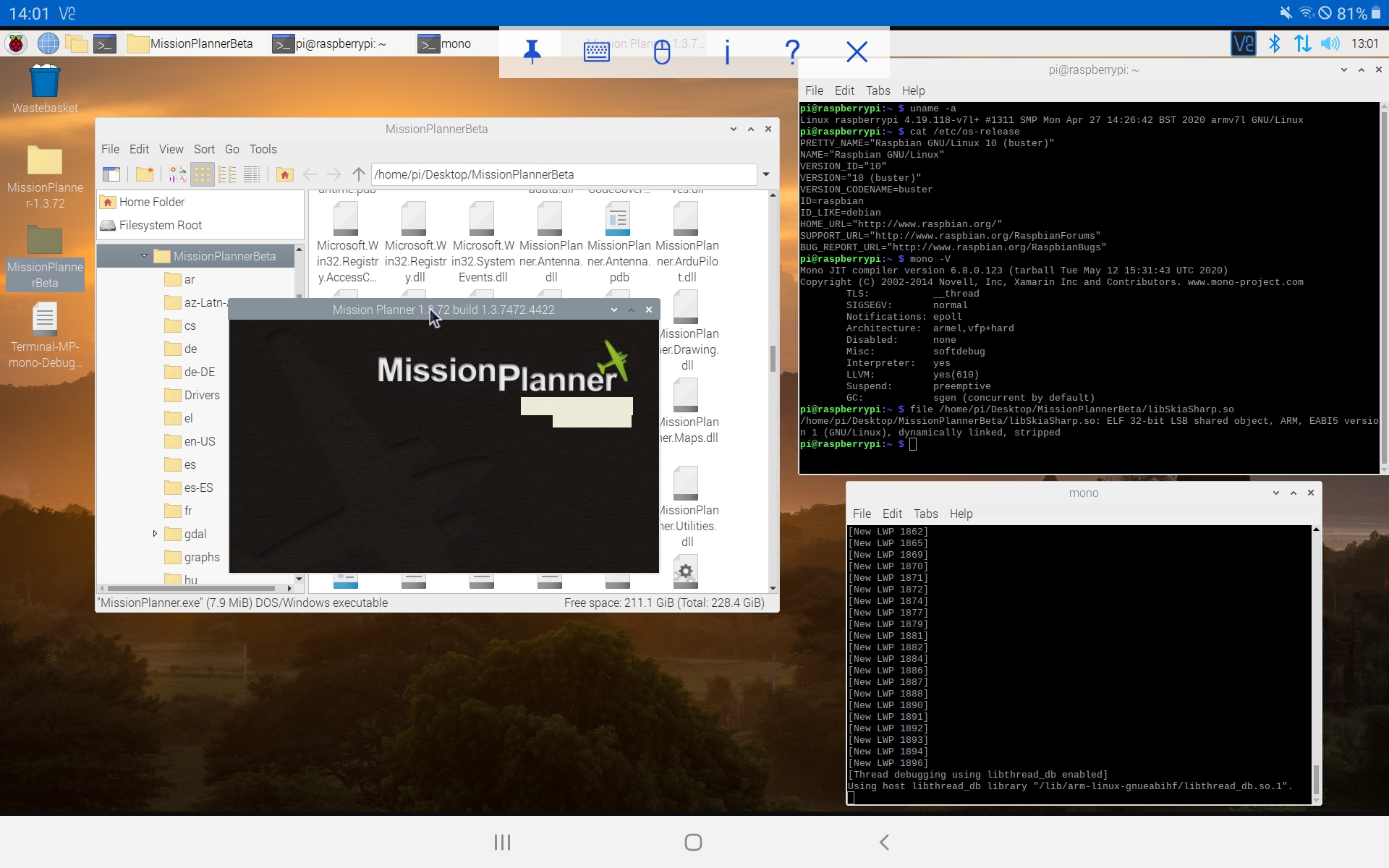
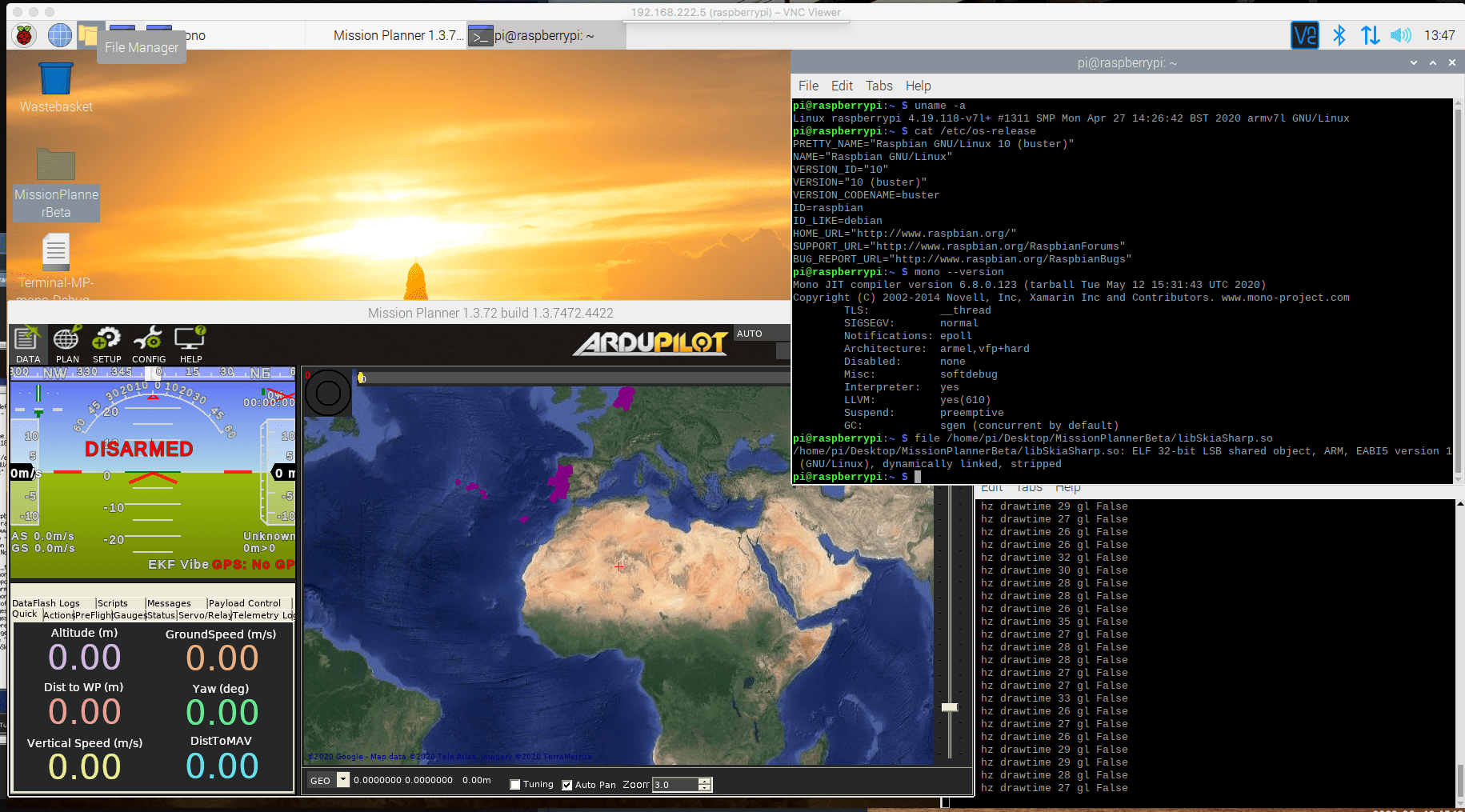
It will load the loading screen, however the windowsForms seem to be not working (wird yellow bars).
Then it kills all actions and exits, as seen in the bottom right corner.
Top right are my system informations.
You should look on the terminal where you use mono, if there are some failure, they will be notified !
And should shouldn’t need to use sudo to launch mission planner with mono. Better remove the current MissionPlanner directory, and unzip a fresh version to avoid issue with previous sudo use.
1 Like
Hey khancyr,
Thanks for your reply. I did have a look into the mono debug output, but i’m not getting any clues there since i just don’t know this stuff well enough.
I attached the mono debugging output 10 posts further to the top. I would greatly appreciate if you could find some time to look through it for some clues.
My latest screenshot shows the start from a freshly downloaded and unzipped beta version. I also did not run it with sudo.
Or are you talking about the directory “MissionPlanner” in the root directory, which is automatically created on first startup? I have been thinking about that directory. Should the libSkiaSharp.so file be copied over there? Or maybe even the whole MP zip file?
ok think ive found it.
disable the opengl driver in raspbian
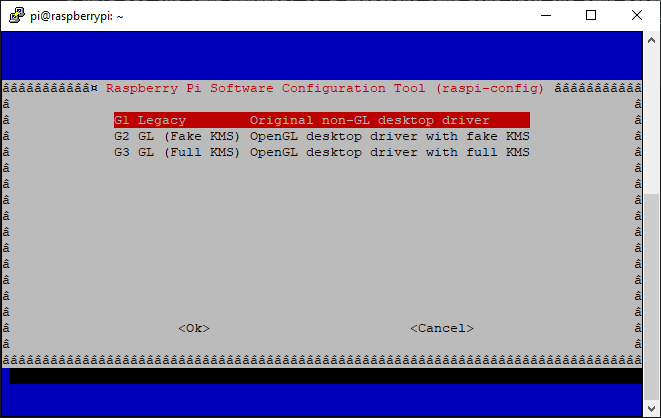
Missionplanner does use opengl, but seems it doesnt support it on raspbian.
Would it be possible to have an “how to” install MP on rpi4? I would give it a shot.
after breaking mine, im not 100% sure which problem it is
but i used
sudo apt-get install xserver-xorg-video-fbturbo
to fix part of it
not atm, as im the only one who has made it work. but on a rpi3.
i have ordered a rpi4, just waiting on arrival.
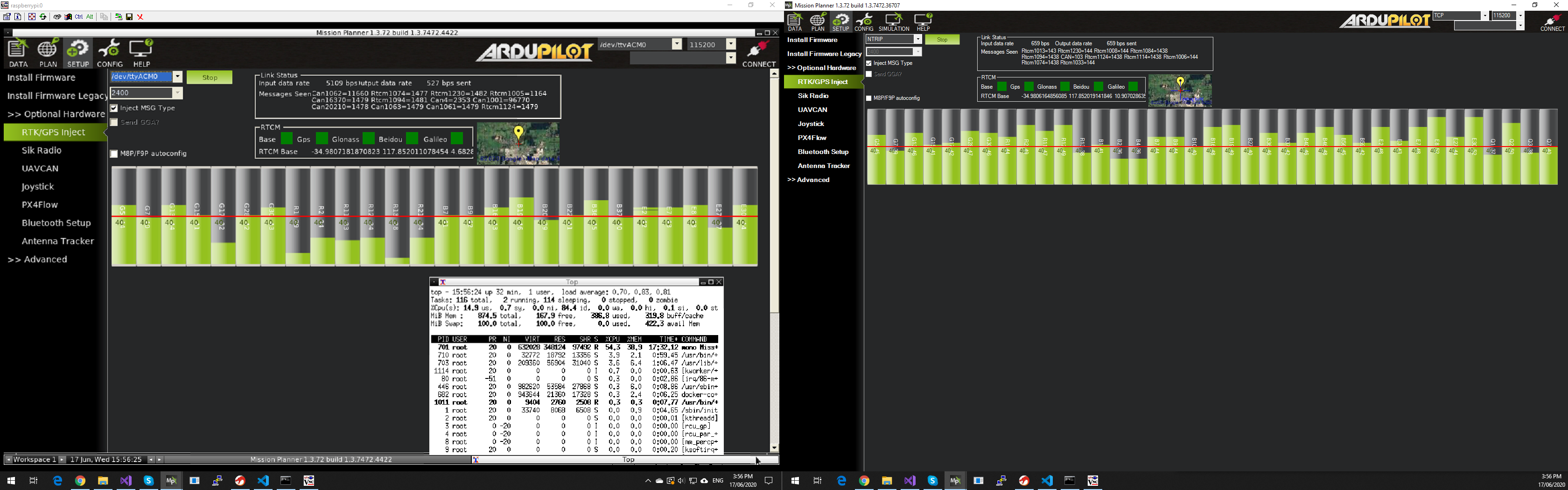
gps testing on the pi3
could you post your xorg log
/var/log/Xorg.0.log
just wondering if i can see anything different
I got it working on a RPI3 and odroid C1, when we discuss last time. I wonder what change since then, and on the RPI4 ?
Does it run at a decent speed on rpi3?
Of course a “how to” is possible.
That was pretty much my whole intention of this post. When i get it up and running i will make an clean and simple guide.
mind: WHEN it gets up and running 
for now you’ll find pretty much all tutorials in this thread. however, horribly outdated
Michael…
YOU ARE A HERO!
edit: just for future reference. i just did a fresh unzip of the latest MissionPlanner and started it WITHOUT replacing the libSkiaSharp File.
that seems to work too.
Ok it works, waiting for the tutorial
Does it run good on the rpi4?
1 Like
I’m working on the tutorial. Give me some time please, since i’m trying to crosscheck everything so that i’m sure all the tips do actually work for everyone.
There are plenty of factors to consider, for example which image is being used. How many disk space is available (mono complete install needs more than 300MB).
I’m trying to build a guid which works for everyone.
Speedwise i can unfortunatly not tell too much, because i’m still waiting for my pixhawk to be delivered.
However i do want to run a SITL simulation to test it. But in the beginning it would be heavily reliant on people like you, to test it
Then there is also the option to change the 32bit operating system to 64 bit. The raspi4 processor does actually support 64 bit. However i need to test if one would be supposed to follow other steps when installing everything (like mono e.g.)
Not even mentioning overclocking, which i can not really test. Because i’m only passively cooling my raspi.
Long story short: Mission Planner does run way better on the raspi than one would think. BUT it is by standard just a 32bit system with 1000mhz. So do expect some minor lags here and there.
Edit: my target was to provide an option to running Mission Planner in the field on something else than a laptop. Something with little power consumption (a raspberry will, out of the box, run with a usb powerbank with 12aH up to 8 hours without tinkering with cables). For me it would be for a simple way to passthrough nmea output via bluetooth. However the possibilities are endless. But do notice, that it is more of a fieldbox for tinkering with settings and what not in the field.
Thank you, looking forward to try it.
An image clean and working based on rpi buster would be even better
Corrado