You need to set that channel to an analog knob (potentiometer).
1 Like
Or the correct radio switch mix. With a 2-3 position switch you should easily get 2-3 PWM values if that’s what you want.
Do I understand correctly that you want both manual control and control during a Mission?
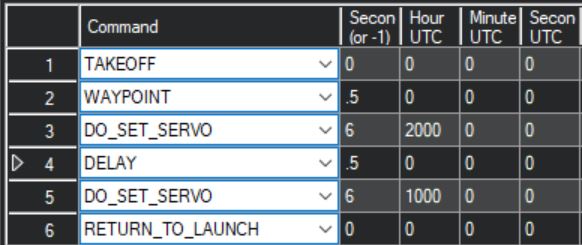
This reached WP1, delays for .5s, commands chan 6 output to 2000, delays .5s and commands it to 1000.
But this relies on timing being right. As @Mustafa_Gokce suggests this isn’t very robust.
2 Likes
this will do the same thing as do_repeat_servo you said, but wouldn’t the timing be a problem? Can you try do_repeat_servo command with STL? Does the servo actually turn on and off at the specified time?
çok haklısın dostum 
You try it, it will be a valuable tool going forward. You can use the Simulator in Mission Planner. DO_REPEAT_SERVO will return the PWM output to 1500us. If that what you want then use it.
Can I see that the servo is working with mission planer simulation?
I am only making a flight plan in the simulation without connecting to the card. What should I do to see in the simulation that the servo is working?
Can I test servos with STL? me to see the do_set_servo command in the flight plan running?
Sure you can, on the Status screen live. A log is created also, you can review that.
2 Likes
I made a flight plan that I made on mission planer. at some point there is command do_repat_servo. How will I test this command in simulation? How will I test that the servo is working without the drone flying?
As I said view the Status Screen and look at the ChxOut for whatever output you configured in the Mission while the Mission is Running. You can also look at the Messages screen for actions taken (Waypoints reached, etc.)

And read the Wiki:
Mission Planner Simulation