Hello @SuzL
You need to have ArduPilot (ArduCopter or other vehicle) running on the Blue
You can refer to this: BeagleBone Blue released, Linux-enabled autopilot for 80$
Then you Use Mission Planner to connect to BeagleBone and go to
- Initial setup
-Optionnal Hardware
-RangeFinder - Maxbotic Serial

http://ardupilot.org/copter/docs/parameters.html#rngfnd-type-rangefinder-type
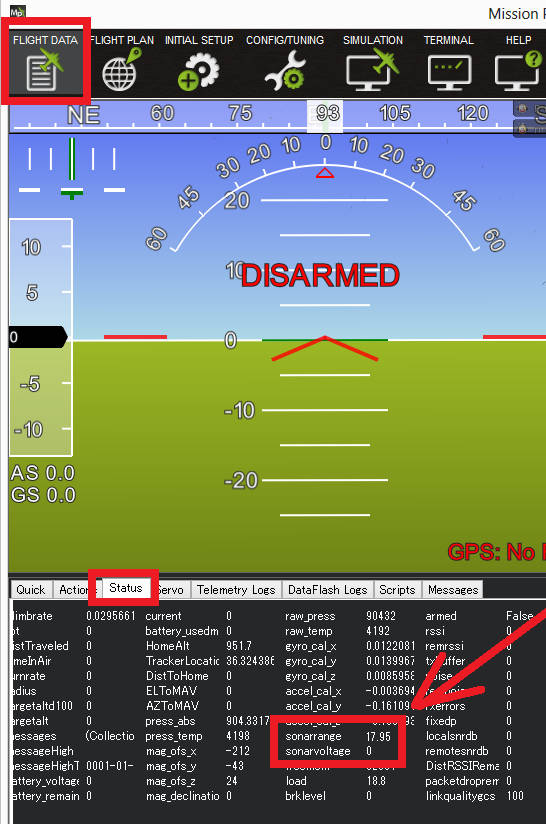
and you should get your reading when looking at