Hello everyone,
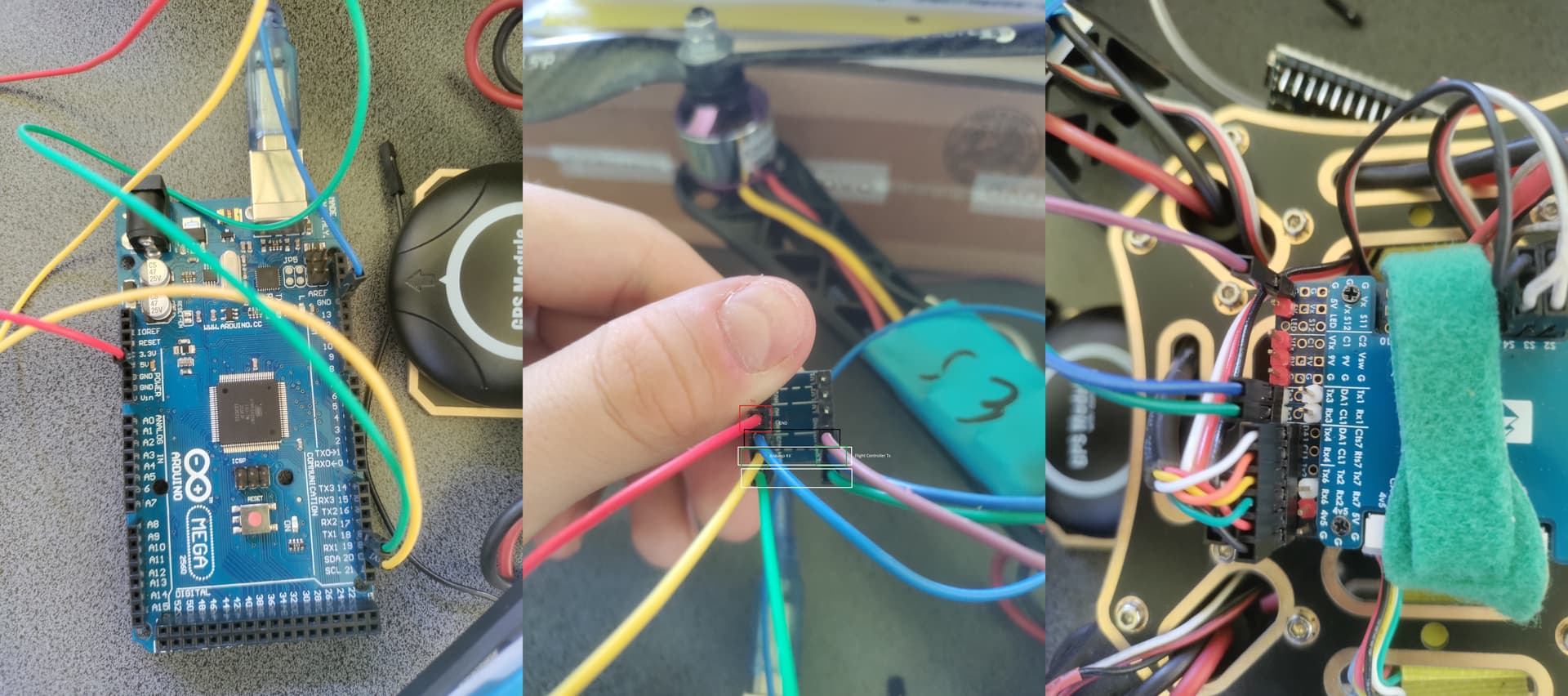
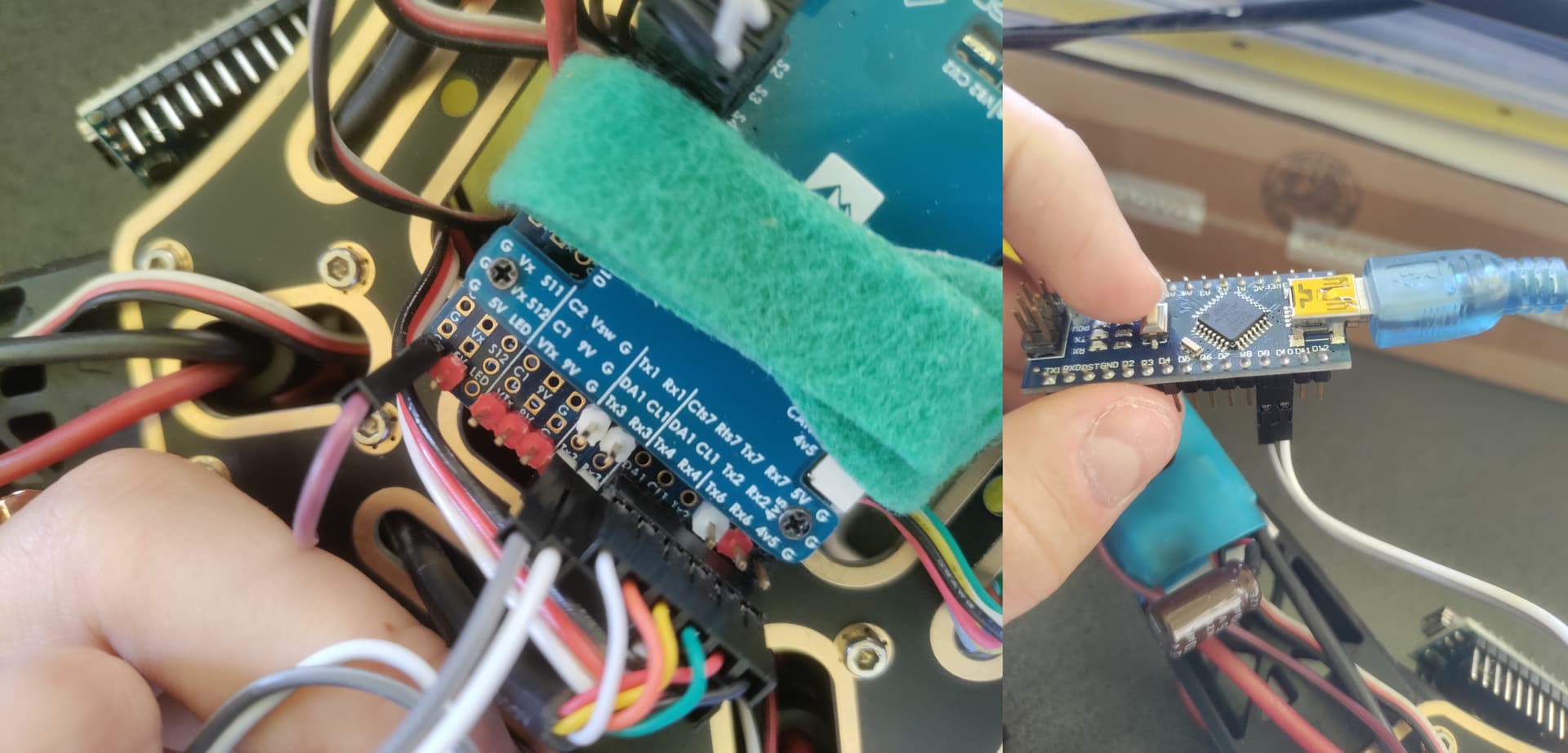
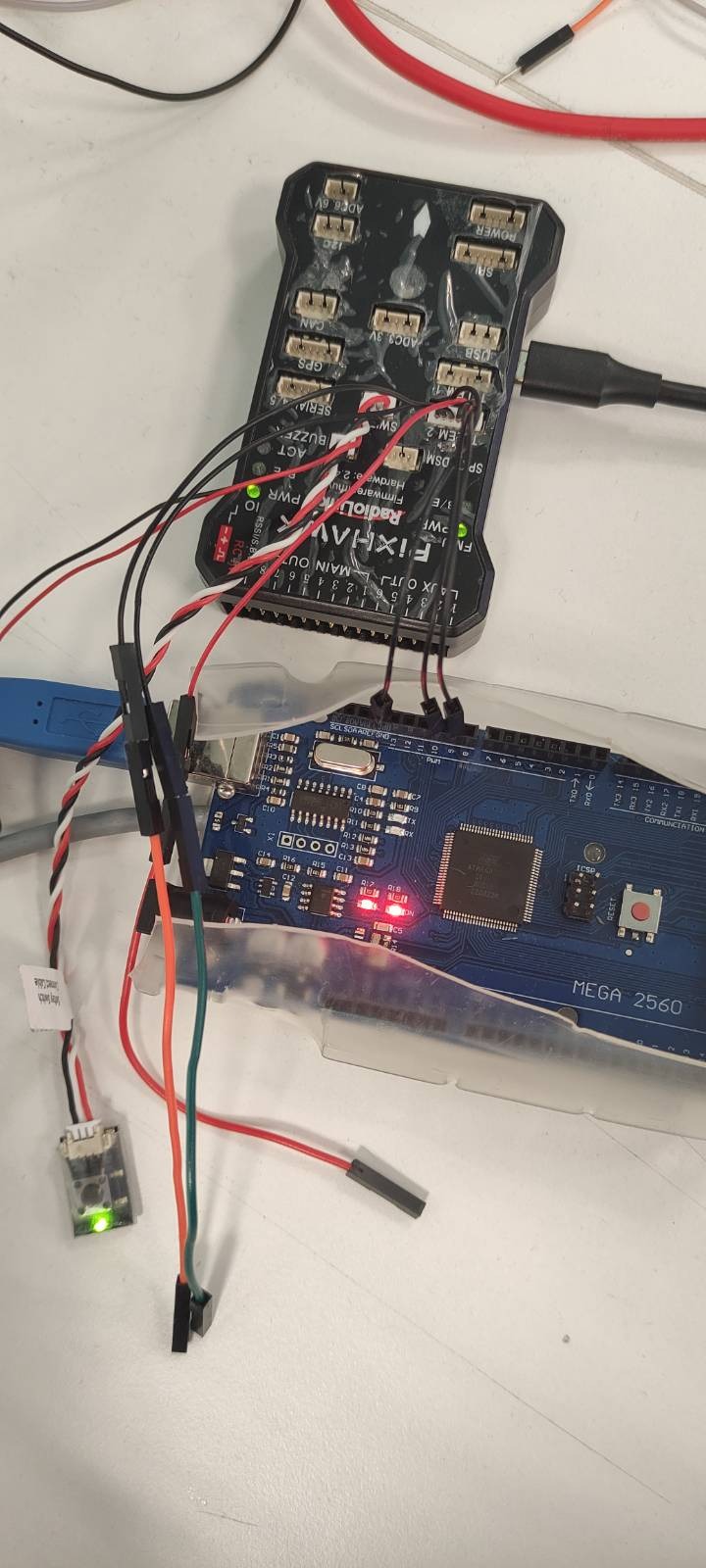
I’m trying to access pixhawk data via arduino with Mavlink but I couldn’t succeed. I tried many examples but pixhawk doesn’t send me data (or I can’t receive it). You can see my connections in the photos I shared. The code block I used:
/* MAVLInk_DroneLights
* by Juan Pedro López
*
* This program was developed to connect an Arduino board with a Pixhawk via MAVLink
* with the objective of controlling a group of WS2812B LED lights on board of a quad
*
* The current version of the program is working properly.
*
* TO DO:
* - Move STREAMS request to RC_CHANNELS to use values in logic
* - Add RC_CHANNLES_RAW messages monitoring: move #30 to RC_CHANNELS_RAW (#35)
* http://mavlink.org/messages/common#RC_CHANNELS_RAW
* - Look for message on low battery:
* To be tested: http://mavlink.org/messages/common#PARAM_REQUEST_READ
* To be checked: http://mavlink.org/messages/common#SYS_STATUS
* - Potential implementation of other alarms, like high intensity
*
* You can restrict the maximum package size with this parameter in mavlink_types.h:
#ifndef MAVLINK_MAX_PAYLOAD_LEN_
// it is possible to override this, but be careful! Defa_
#define **MAVLINK_MAX_PAYLOAD_LEN 255 ///< Maximum payload length_
#endif_
*/
// In case we need a second serial port for debugging
// Library to use serial debugging with a second board
#include "mavlink.h"
//#include "common/mavlink_msg_request_data_stream.h"
// Mavlink variables
unsigned long previousMillisMAVLink = 0; // will store last time MAVLink was transmitted and listened
unsigned long next_interval_MAVLink = 1000; // next interval to count
const int num_hbs = 60; // # of heartbeats to wait before activating STREAMS from Pixhawk. 60 = one minute.
int num_hbs_pasados = num_hbs;
// Lights flashing adjustment
unsigned long previousMillis = 0; // will store last time LED was updated
unsigned long next_interval = 0; // next interval
const long tiempo_on = 20;
const long tiempo_off = 80;
const long tiempo_descanso = 880;
int test_led_tipo = 4;
#define SOFT_SERIAL_DEBUGGING // Comment this line if no serial debugging is needed
#ifdef SOFT_SERIAL_DEBUGGING
// Library to use serial debugging with a second board
#include <SoftwareSerial.h>
SoftwareSerial pxSerial(9,10); // RX, TX
#endif
void setup() {
// MAVLink interface start
Serial.begin(57600);
#ifdef SOFT_SERIAL_DEBUGGING
// [DEB] Soft serial port start
Serial.begin(57600);
Serial.println("MAVLink starting.");
pxSerial.begin(115200);
#endif
}
void loop() {
// Lights management
// Light pulses: 2 quick flashes per second. 100 ms each cycle
unsigned long currentMillis = millis();
int i=0;
// MAVLink
/* The default UART header for your MCU */
int sysid = 1; ///< ID 20 for this airplane. 1 PX, 255 ground station
int compid = 158; ///< The component sending the message
int type = MAV_TYPE_FIXED_WING; ///< This system is an airplane / fixed wing
// Define the system type, in this case an airplane -> on-board controller
// uint8_t system_type = MAV_TYPE_FIXED_WING;
uint8_t system_type = MAV_TYPE_GENERIC;
uint8_t autopilot_type = MAV_AUTOPILOT_INVALID;
uint8_t system_mode = MAV_MODE_PREFLIGHT; ///< Booting up
uint32_t custom_mode = 0; ///< Custom mode, can be defined by user/adopter
uint8_t system_state = MAV_STATE_STANDBY; ///< System ready for flight
// Initialize the required buffers
mavlink_message_t msg;
uint8_t buf[MAVLINK_MAX_PACKET_LEN];
// Pack the message
//mavlink_msg_heartbeat_pack(sysid,compid, &msg, type, autopilot_type, system_mode, custom_mode, system_state);
mavlink_msg_heartbeat_pack(1,0, &msg, type, autopilot_type, system_mode, custom_mode, system_state);
// Copy the message to the send buffer
uint16_t len = mavlink_msg_to_send_buffer(buf, &msg);
// Send the message with the standard UART send function
// uart0_send might be named differently depending on
// the individual microcontroller / library in use.
unsigned long currentMillisMAVLink = millis();
if (currentMillisMAVLink - previousMillisMAVLink >= next_interval_MAVLink) {
// Guardamos la última vez que se cambió el modo
previousMillisMAVLink = currentMillisMAVLink;
#ifdef SOFT_SERIAL_DEBUGGING
pxSerial.write(buf,len);
//Serial.println("Ardu HB");
#else
Serial.write(buf, len);
#endif
//Mav_Request_Data();
num_hbs_pasados++;
if(num_hbs_pasados>=num_hbs) {
// Request streams from Pixhawk
#ifdef SOFT_SERIAL_DEBUGGING
Serial.println("Streams requested!");
#endif
Mav_Request_Data();
num_hbs_pasados=0;
}
}
// Check reception buffer
comm_receive();
}
void Mav_Request_Data()
{
mavlink_message_t msg;
uint8_t buf[MAVLINK_MAX_PACKET_LEN];
// STREAMS that can be requested
/*
* Definitions are in common.h: enum MAV_DATA_STREAM
*
* MAV_DATA_STREAM_ALL=0, // Enable all data streams
* MAV_DATA_STREAM_RAW_SENSORS=1, /* Enable IMU_RAW, GPS_RAW, GPS_STATUS packets.
* MAV_DATA_STREAM_EXTENDED_STATUS=2, /* Enable GPS_STATUS, CONTROL_STATUS, AUX_STATUS
* MAV_DATA_STREAM_RC_CHANNELS=3, /* Enable RC_CHANNELS_SCALED, RC_CHANNELS_RAW, SERVO_OUTPUT_RAW
* MAV_DATA_STREAM_RAW_CONTROLLER=4, /* Enable ATTITUDE_CONTROLLER_OUTPUT, POSITION_CONTROLLER_OUTPUT, NAV_CONTROLLER_OUTPUT.
* MAV_DATA_STREAM_POSITION=6, /* Enable LOCAL_POSITION, GLOBAL_POSITION/GLOBAL_POSITION_INT messages.
* MAV_DATA_STREAM_EXTRA1=10, /* Dependent on the autopilot
* MAV_DATA_STREAM_EXTRA2=11, /* Dependent on the autopilot
* MAV_DATA_STREAM_EXTRA3=12, /* Dependent on the autopilot
* MAV_DATA_STREAM_ENUM_END=13,
*
* Data in PixHawk available in:
* - Battery, amperage and voltage (SYS_STATUS) in MAV_DATA_STREAM_EXTENDED_STATUS
* - Gyro info (IMU_SCALED) in MAV_DATA_STREAM_EXTRA1
*/
// To be setup according to the needed information to be requested from the Pixhawk
const int maxStreams = 2;
const uint8_t MAVStreams[maxStreams] = {MAV_DATA_STREAM_EXTENDED_STATUS, MAV_DATA_STREAM_EXTRA1};
const uint16_t MAVRates[maxStreams] = {0x02,0x05};
for (int i=0; i < maxStreams; i++) {
/*
* mavlink_msg_request_data_stream_pack(system_id, component_id,
* &msg,
* target_system, target_component,
* MAV_DATA_STREAM_POSITION, 10000000, 1);
*
* mavlink_msg_request_data_stream_pack(uint8_t system_id, uint8_t component_id,
* mavlink_message_t* msg,
* uint8_t target_system, uint8_t target_component, uint8_t req_stream_id,
* uint16_t req_message_rate, uint8_t start_stop)
*
*/
mavlink_msg_request_data_stream_pack(2, 200, &msg, 1, 0, MAVStreams[i], MAVRates[i], 1);
uint16_t len = mavlink_msg_to_send_buffer(buf, &msg);
#ifdef SOFT_SERIAL_DEBUGGING
pxSerial.write(buf,len);
#else
Serial.write(buf, len);
#endif
}
// Request: PARAM_REQUEST_LIST. Only for full log recording
/*
* Primitive: mavlink_msg_param_request_list_pack(uint8_t system_id, uint8_t component_id, mavlink_message_t* msg,
uint8_t target_system, uint8_t target_component)
*/
/*
// Configure
uint8_t system_id=2;
uint8_t component_id=200;
// mavlink_message_t* msg;
uint8_t target_system=1;
uint8_t target_component=0;
// Pack
mavlink_msg_param_request_list_pack(system_id, component_id, &msg,
target_system, target_component);
uint16_t len = mavlink_msg_to_send_buffer(buf, &msg);
// Send
#ifdef SOFT_SERIAL_DEBUGGING
pxSerial.write(buf,len);
#else
Serial.write(buf, len);
#endif
*/
}
void comm_receive() {
mavlink_message_t msg;
mavlink_status_t status;
// Echo for manual debugging
// Serial.println("---Start---");
#ifdef SOFT_SERIAL_DEBUGGING
while(pxSerial.available()>0) {
uint8_t c = pxSerial.read();
#else
while(Serial.available()>0) {
uint8_t c = Serial.read();
#endif
// Try to get a new message
if(mavlink_parse_char(MAVLINK_COMM_0, c, &msg, &status)) {
// Handle message
switch(msg.msgid) {
case MAVLINK_MSG_ID_HEARTBEAT: // #0: Heartbeat
{
// E.g. read GCS heartbeat and go into
// comm lost mode if timer times out
#ifdef SOFT_SERIAL_DEBUGGING
//Serial.println("PX HB");
#endif
}
break;
case MAVLINK_MSG_ID_SYS_STATUS: // #1: SYS_STATUS
{
/* Message decoding: PRIMITIVE
* mavlink_msg_sys_status_decode(const mavlink_message_t* msg, mavlink_sys_status_t* sys_status)
*/
//mavlink_message_t* msg;
mavlink_sys_status_t sys_status;
mavlink_msg_sys_status_decode(&msg, &sys_status);
#ifdef SOFT_SERIAL_DEBUGGING
Serial.print("PX SYS STATUS: ");
Serial.print("[Bat (V): ");
Serial.print(sys_status.voltage_battery);
Serial.print("], [Bat (A): ");
Serial.print(sys_status.current_battery);
Serial.print("], [Comms loss (%): ");
Serial.print(sys_status.drop_rate_comm);
Serial.println("]");
#endif
}
break;
case MAVLINK_MSG_ID_PARAM_VALUE: // #22: PARAM_VALUE
{
/* Message decoding: PRIMITIVE
* mavlink_msg_param_value_decode(const mavlink_message_t* msg, mavlink_param_value_t* param_value)
*/
//mavlink_message_t* msg;
mavlink_param_value_t param_value;
mavlink_msg_param_value_decode(&msg, ¶m_value);
#ifdef SOFT_SERIAL_DEBUGGING
Serial.println("PX PARAM_VALUE");
Serial.println(param_value.param_value);
Serial.println(param_value.param_count);
Serial.println(param_value.param_index);
Serial.println(param_value.param_id);
Serial.println(param_value.param_type);
Serial.println("------ Fin -------");
#endif
}
break;
case MAVLINK_MSG_ID_RAW_IMU: // #27: RAW_IMU
{
/* Message decoding: PRIMITIVE
* static inline void mavlink_msg_raw_imu_decode(const mavlink_message_t* msg, mavlink_raw_imu_t* raw_imu)
*/
mavlink_raw_imu_t raw_imu;
mavlink_msg_raw_imu_decode(&msg, &raw_imu);
#ifdef SOFT_SERIAL_DEBUGGING
//Serial.println("PX RAW IMU");
//Serial.println(raw_imu.xacc);
#endif
}
break;
case MAVLINK_MSG_ID_ATTITUDE: // #30
{
/* Message decoding: PRIMITIVE
* mavlink_msg_attitude_decode(const mavlink_message_t* msg, mavlink_attitude_t* attitude)
*/
mavlink_attitude_t attitude;
mavlink_msg_attitude_decode(&msg, &attitude);
#ifdef SOFT_SERIAL_DEBUGGING
//Serial.println("PX ATTITUDE");
//Serial.println(attitude.roll);
Serial.println("asd");
#endif
}
break;
default:
#ifdef SOFT_SERIAL_DEBUGGING
Serial.print("--- Otros: ");
Serial.print("[ID: ");
Serial.print(msg.msgid);
Serial.print("], [seq: ");
Serial.print(msg.seq);
Serial.println("]");
#endif
break;
}
}
}
}
As you can see, it constantly outputs “Stream Requested!”. I think pixhawk is not sending data.
Please help me.
Sincerely.