Michael Oborne has just told me a way to extract the DPTH without having to use Excel.
- open the .bin (or .log) in MP (from “Flight Data” screen’s “DataFlash Logs” tab, select “Review Log” and select log file)
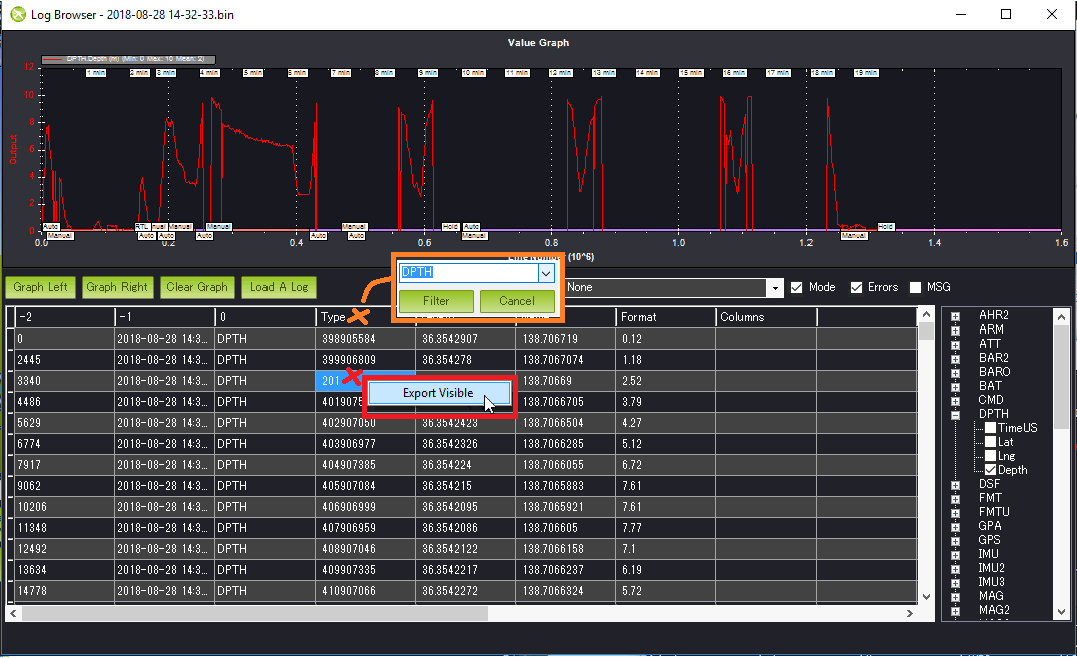
- right mouse button click on the column headers in the data area, select DPTH from the drop down
- right mouse button click in the data area, select “Export Visible” and provide a file name