Well, somewhat coincidentally I’m just about to start assembling two more for a Japan mapping project called DeSet (web page, video-with-over-the-top-music) and I’d be happy to send you some parts (carbon fibre plates, electronics box, screws) to make it easier to assemble if you like. I think you’re more mechanically savy than I am so you might have some good advice for improving it.
I’ve changed the design a bit from the original by:
larger battery (7500mAh) which I hope will give a bit over 1hr of drive time
larger electronics box (20cm x 30cm) with latches instead of the 17x25cm with screws of the original
different carbon fibre boards to connect the waterproof box and thrusters to the boogie board
I would really like to add standoffs between the boogie board frame and the thrusters to help avoid floating sticks and leaves from getting caught in the props… but I haven’t figured out how to get these made yet.
I also haven’t figured out how I’m going to cut all the required holes perfectly vertically through the boogie board because it won’t fit under a drill press.
@rmackay9, The DeSet project looks like a good challenge. I’m sure you are up to it if anyone is! The project I have in mind is for my company but is experimental. We have ponds we sound on occasion manually with a person in a boat. I would like to try to automate the process. I have a little bit of a budget, so I hope I can buy relatively good quality parts and also pay you for any parts and shipping that I cannot source more easily locally. I will PM you my information.
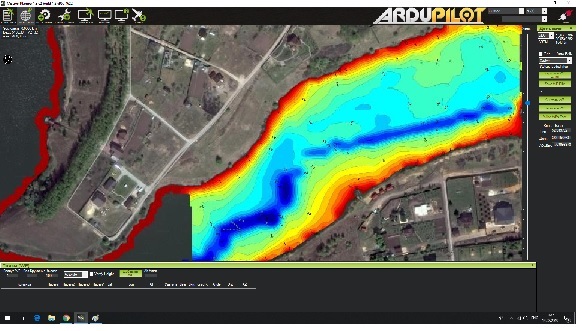
I’m jealous of the Herelink. I’ve done a bit of pond bathymetric surveys with an inexpensive Lowrance Elite 4 system and a survey grid on Mission Planner. The Ping Sonar looks like an affordable substitute with the possibility of viewing depths live ( I think ).
Congratulations for this input.
Do you think that is possible to connect the DST-2 to the Lowrance Totalscan transducer? It also runs 200Khz. But the connector is 9 pins.
Thanks so much.
I would think you should be able to make it work. The totalscan supports multiple frequencies, does sidescan and downscan. And chirp right? The DST200 will of course only drive it at 200kHz.
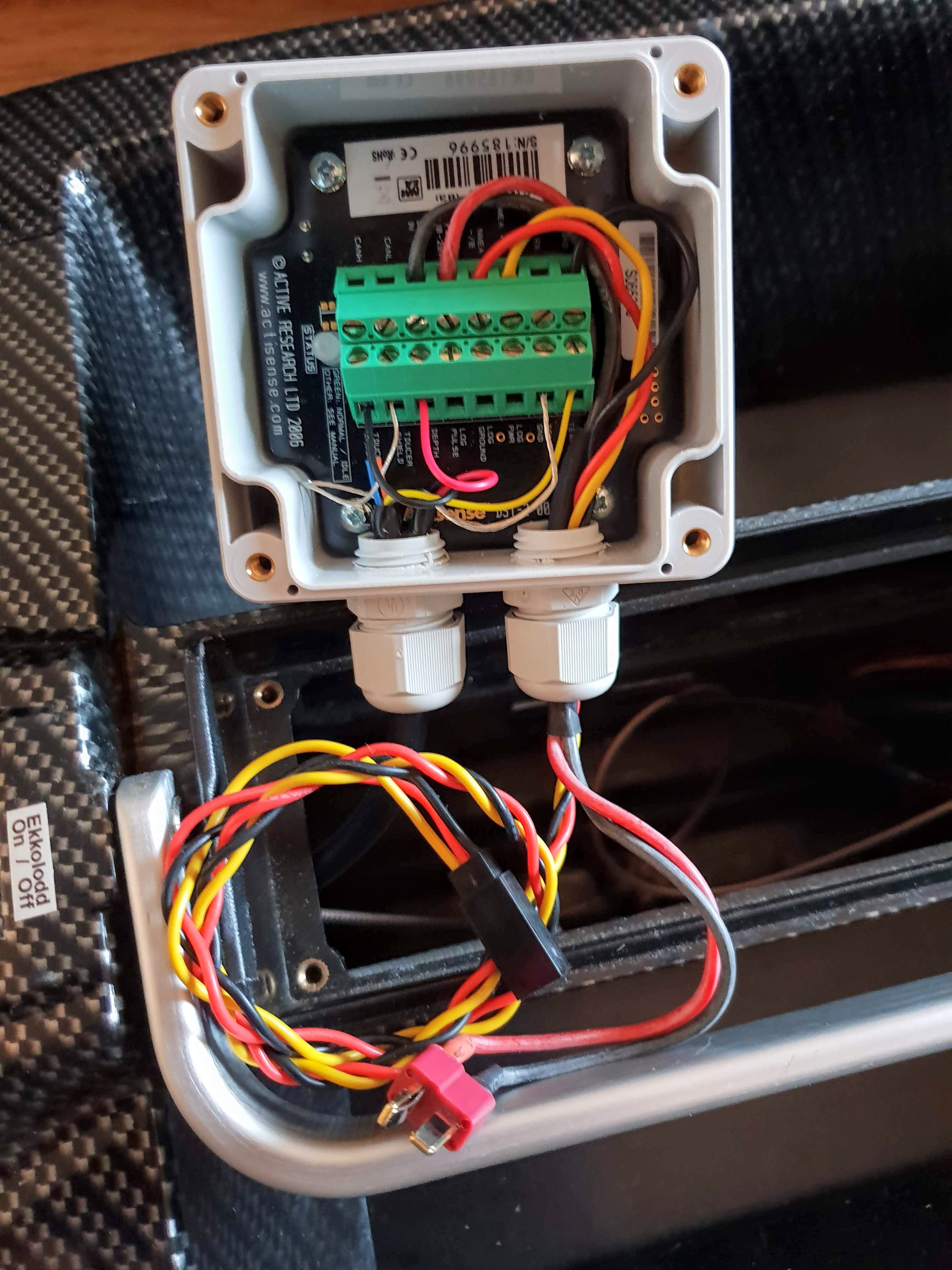
To make it work you need to figure out how the pins are wired. I had a quick look around for a wiring diagram with no direct hit. But when I think back, neither had I. I studied some Airmar pinouts and made my best guesses.
The source I used is probably still valid: http://www.gemeco.com/wiring-transducer.php
One problem (challenge) though: It is stated as a listing of non-chirp transducers. But it does include transducers with 9 pins.
I had hoped to find the answer here instead: http://www.gemeco.com/wiring-chirp.php
But, as the introduction reveals, you will probably not find 9 pins answers here. Did not search extensively, though. And only had my cell phone at hand.
My best bet is to start to look into the Airmar 9 pins alternatives. Lowrance (intentionally, I assume) does not document the wiring at all. So you will have to experiment. Or try to find answers by a more thorough search
I don’t qualify as one of the “more experienced folks” but I had been thinking to try the analog sonar because it’s so cheap and apparently has a long range… so if you do try it I very much look forward to hearing how it goes!
@PauG: If the transducer cable has two cords, lookup the Elite TI manual (chapter 5 - Wiring).
@ktrussell: That solution works. It is built into my carp fishing “bait boat” (60 cm trimaran with 3x 4S 6600mah Li-Ion batteries) - it is a mini cargo ship I guess the cost for the DST is high because it is a niche product with no fierce competition between vendors).
@rmackay9: I find reading off the logs from my Pixhawk to be ultra slow. I’m currently building in a RPi in my boat to run UAVCast and get rid of my radios for telemetry (4G coverage is without issues most places in Norway). If I could read off the log in a matter of seconds from the RPi instead I would be happy.
To produce the map (I use Reefmaster), only the lat, lon and depth are needed. The additional parameters could perhaps reveal that the transducer is not in level with the water line (“deadrise” when motors are speeded up)? To be used to re-calculate the position before the data is imported into the mapping software? It would require a high precision (RTK) GPS to make any sense, I think.
I got into serious problems to read off the logs late autumn last year (MP and QGC both failed). Will look further into this in a couple of weeks - perhaps some bad soldering in some modifications I did causes telemetry instability. When it did work I found the requirement for the boat to be disarmed in order to read off logs to be challenging as well. I really struggled to disarm it, and went through a series of settings trying to solve this. A simple disarm command from the ground control station would be great (it is there, but somehow not supported by the rover). Now I have to arm my boat before I can use it - and I truly dislike that since the boat often is run in manual mode and since arm/disarm of a boat does not make a lot of sense anyway.
My main focus right now is however the maps - I’ve spent some efforts on bathymetric maps because I need them when I “fly”. I’ve created a MapBox account and “styled” all of my depth maps onto the “satellite” map. Result is excellent. And by workarounds I have a slightly buggy working solution utilizing the retired “Tower” app. What’s remaining is for QGC or MP to use my styled rather than the MapBox’ default “satellite” version: I need to “see” what I have mapped so far when I continue mapping in several steps, and I need the maps themselves to make “educated” decisions when I edit a mission on a fishing trip. Probably slightly off topic, but likely something most folks in this thread would be interested in. Anyway: Really grateful for your efforts!!!
Good, you are up for the challenge!!! Not that difficult, of course
And sure, my boat is… A self build set from German “Carplounge” (model “RT4”). Heavily modified. Ardurover for one - even bought me some stickers. Backup battery switched from the Tx and other features resulted in purchase of a 12-channel Rx/Tx. Transducer and DST-200 built in last autumn. Alternative fishfinder and mapping solution fully working by means of a “Deeper”, an extra cell phone and high performance Velcro. And on…
By the way - this is a great advice for rock solid semi fixed installation of everything: Use “Double Click” velcro (3M I think). Incredibly reliable, all electronics but my motors are mounted using this. That velcro is expensive - and I love it!!!
Here’s my “pride” all dressed up with new stickers…
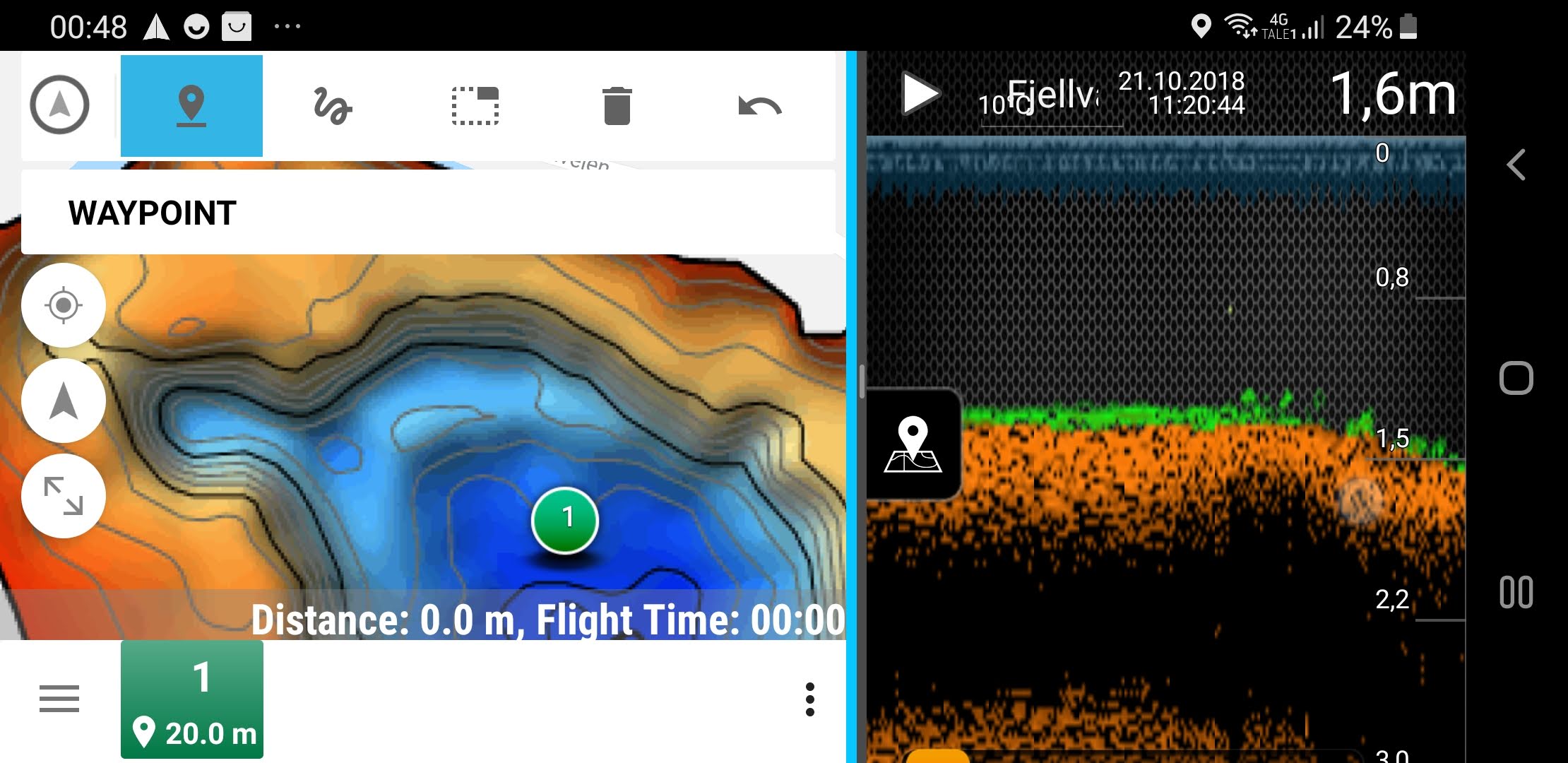
When I experienced instability retrieving logs, alternatives were needed. A Deeper, the flexible part of the boat mount, an extra cell phone and of course my beloved velcro: It’s not my target solution, but it works very well:
A Samsung with Tower (in mission edit mode) with depth map as background map & split screen with Deeper live depth reading. I map waters because I want to use these maps actively in my GCS!!! Only works during mission edit, but better than nothing. Not sure if I’m able to write the needed code changes in QGC my self, but I am going to try
This mapping was first performed with by Lowrance transducer and my DST. When home I failed to retrieve the logs. So I drove back and ran the boat for another 90 minutes with the Deeper. Post processing in Reefmaster. Imported as a tileset in MapBox. Despite complaining error messages, the map is visible when I add the Map Id for the imported tileset as Map Id in Tower (integration in Tower made for a previous version of MapBox APIs) The correct integration now is to use the Map URL and another API. New challenge…
logs can be streamed to the companion computer (and stored there) if it’s running “dflogger” which is included by default in the RPI APSync image.
it might be good to set up an auxiliary switch to arm/disarm the vehicle. This is what I do and it’s very quick and easy to arm/disarm. arming/disarming is somewhat important in that it sets the home position used for RTL - with arming-not-required set it will just use it’s location at the moment the EKF achieves a good position estimate.
I’ve never seen UAVCast before but I might give that a try. I’ve been looking for an easy-to-use 3G/4G telemetry solution.
Adding the ability to update the GCS maps in real-time sounds like a great idea. It’s out of my area of expertise but I would think it’s possible.
Olav,
Thank you for the great pictures and explanation. That is a beauty! My first boat is going to be a boogie board very much like Randy’s but who knows where I will go from there. I have some parts on order. That “Deeper” looks very interesting as a way to log outside the ArduPilot system. I may try that eventually. Thanks so much! I will be back with questions for all I am sure!
Also consider building the same. Mapping time can be cut down by using more than one boat . The thrusters concern me, however. They stand unprotected off the bottom and will most certainly pick up debris that will cause issues. A front mesh to avoid stuff jamming into the propeller, perhaps…
I have two water jet engines, built into the outer keels with water intake at the bottom behind a mesh structure. Issues caused by debris are hardly likely. I have had to swim out and save it two times due to blown fuses, though
Great schematics Olav! I will take a look onto them and try-and-fail with my Totalscan 9-pin cable. As you said Lowrance doesn’t document this issue.
I prefer to use my Totalscan because is the transducer that I have installed with special support on my boat. Sometimes I use sidescan and sometimes Downscan. Other option is to add a new support for a HST-WSBL or even a ECT-400.
By the way, I use TBS crossfire for RC and bridged mavlink telemetry. Anyone else use this setup?
It seems to work well for the moment. Let’s see when adding depth from DST-2.
I’m clearly not a developer, but I installed Qt and set up an environment for QGC. Must say that it requires some reading to figure out how it all fits together. But after some thinking and searching I figured out that the code configuring the API call for MapBox is in the file “QGCMapUrlEnging.cpp”.
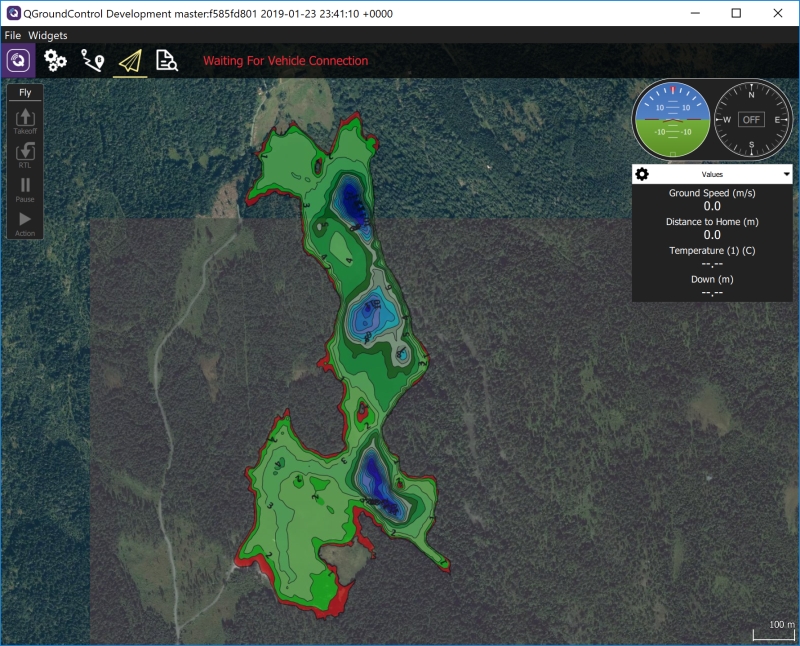
I battled with the API documentation and tested in a browser until it finally dawned on me that it was possible to use another API. Browser-tests finally succeeded when I read through the doc section “Retrieve raster tiles from styles”. I am not competent (yet, anyway) to add fields to enter MapBox username and style Id and then to alter the code to use these rather than default map alternatives IF so desired. So I simply hacked the UrlEngine code to try. And voila…
Proof of concept: Not just make maps, but be able to use them in the QGC as well! Now all that remains is to request someone far more competent than me to implement this in a quality manner so that we all may utilize our hard efforts in producing the maps
I have all parts ordered for my first mapping boat except the battery (just wanting to wait to see if I need to order another thing or two from vendor before I order) and the flight controller. Any recommendations for the flight controller? I will want it to reliably log the sonar data to an SD card. I have had good success with the old Pixhawk 2.4.8 (I think that’s the right model - basically a Pixhawk 1, maybe?) but was thinking about trying either a Cube or the Kakute F7. Thoughts?
Hi Olav! Great achievment for mapping and fishing with Qgc. I have the same carplounge rt4 with pixhawk and lowrance elite 4 with nmea out and bt gps. Curently i am using MP. Mapping with Reefmater and laptop not a problem, but fishing is unhandy. Android tablet and qgc looks much comfortable. I made my bathymetric mapbox maps but stuck in qgc modification to load proper map layers. Can you please share you experience.

 I guess the cost for the DST is high because it is a niche product with no fierce competition between vendors).
I guess the cost for the DST is high because it is a niche product with no fierce competition between vendors).