OK. Here’s my contribution on how to set up an “alternative solution”, ie: Digitize readings from an (old) analog transducer into NMEA0183
Equipment needed:
- Analog transducer
Example uses a Lowrance HST-WSBL 83/200 kHz (transom mount transducer)
Documentation hard to find
Fairly cheap (USD 60 on Amazon.com, Nov 2018) - Digitizing gear
Example uses Actisence DST-2 (200 kHz, matching transducer, other frequencies available)
Good documentation available on: http://www.actisense.com/media/?product=dst-2&type=downloads
Moderately priced (USD 195 on Navstore.com, Nov 2018)
The key of this solution is the DST-2. You connect it to a power source (10-28V input accepted, I use a 4S Lipo), and then it can drive an analog transducer, read off the analog result and translate depth, speed and temperature in NMEA0183 format. For the transducer I used, only depth and temperature are available.
Installation of the DST-2 is super easy. User manual (pages 7-9) clearly describes how to connect a power source, the transducer and how to tap off the serial data.
If you have or acquire a transducer with well documented pinouts, the complete setup is quick. My HST-WSBL was not “well documented”, but solved with some trial and error. I found that the following Airmar pinout of 91-849 rev 01, (available at http://www.gemeco.com/wiring-transducer.php) was correct. Cable coloring to pin# was then figured out by means of a multi meter after I cut the cable:
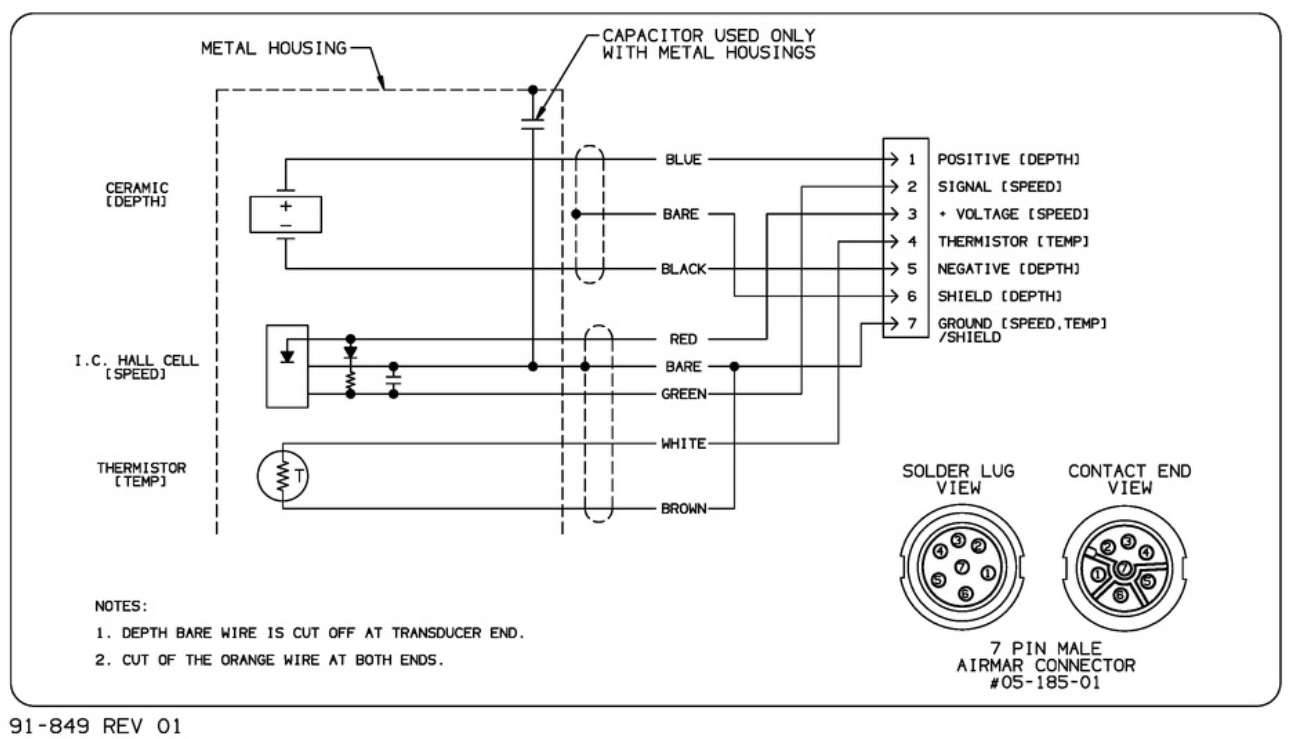
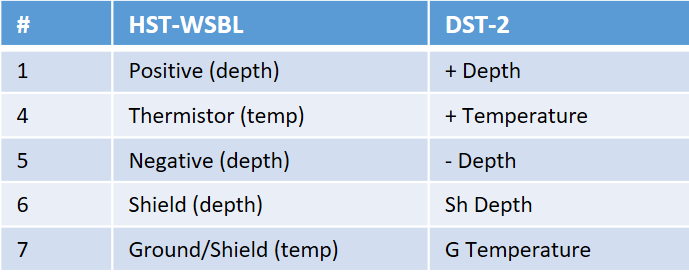
Since the HST-WSBL transducer lacks a speed sensor, only pins 1 and 4-7 are relevant. Wires to be connected to the DST-2’s “right hand side”, like this:
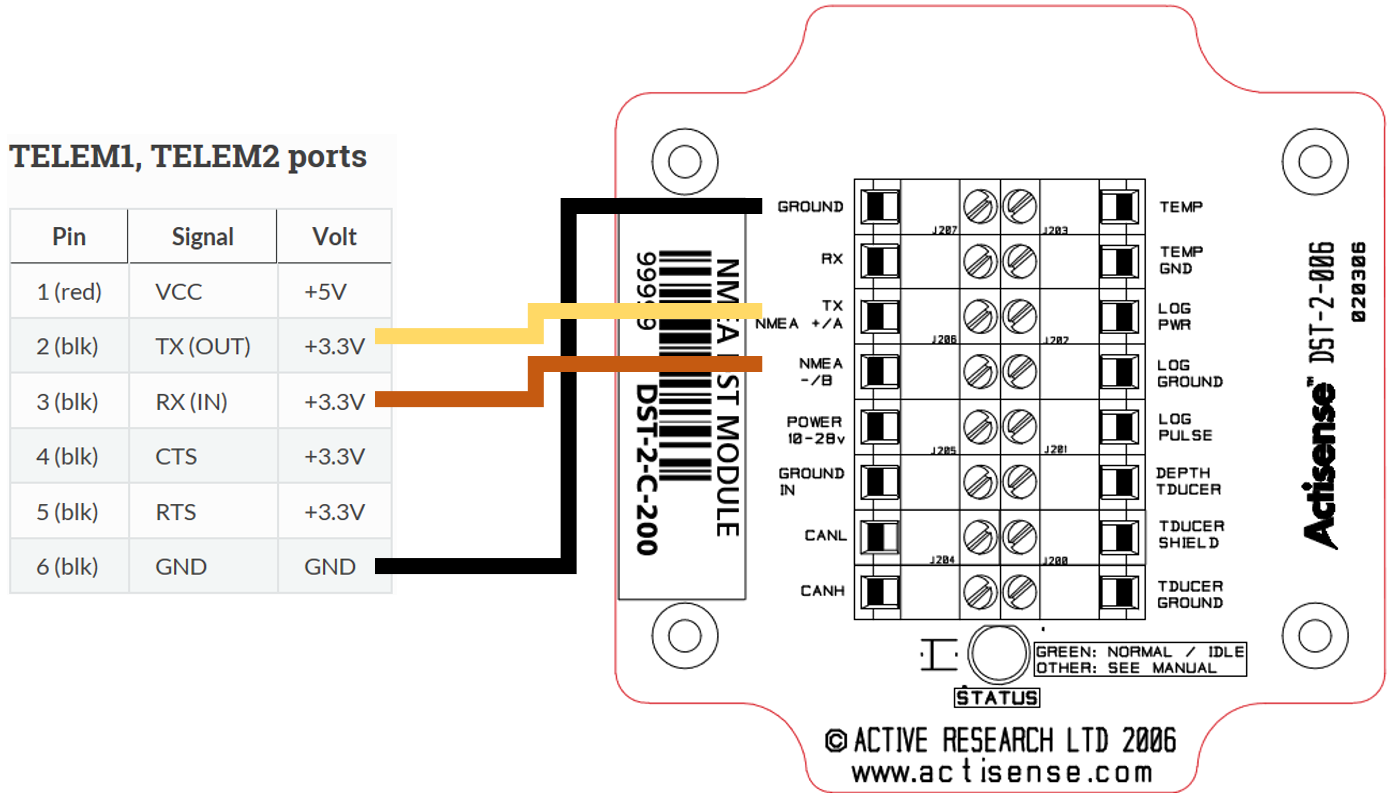
On the left-hand side of the DST-2 you will find the connections for power input and serial & RS-232 output. The easiest is to use the 5V serial output and connect it directly to the telemetry port of the pixhawk (tx, rx and a common ground). Read the DST-2 docs for yourself, here’s the wiring I got working:
Set up Serial and Range Finder parameters as in the general description, with exception of the baud rate:
SERIAL2_BAUD = 4 (4800 baud)