You need to disarm in Autotune mode. Also, the log of the actual Autotune session is not of much value unless you are flying around in the new PID’s after it has completed. Make another post Autotune flight for analysis.
I know that you needed to disarmed in Autotune But I thought that it was for when the autotune was succesfull. If you disarmed in autotune and you did not get a success autotune message, are you going to get different PID’s?
Hi,
It’s been a while since our last conversation, I took a break from tuning for two weeks.
Last week I went flying again and with very good weather conditions ( low wind) I manage to autotune the roll axis and the Yaw axis. The roll axis autotune PID’s results seems weird for me. I’ve used autotune PID’s roll results in the pass and my drone was very very unstable. This is why I didn’t attempt the pitch autotune because I wanted to know your thoughts on the Roll axis PID’s numbers (see attached picture). On the other hand I thought that the YAW autotune numbers made sens.
So here are my questions:
1-What do you thing about the Roll axis PID’s #? for me a P stabilized of 1.27 doesn’t make sens and a rate P & I of 0.076 seems way to low. See attached picture.
2- Does the YAW PID’s # from the autotune make sens? see attached parameters
3-My UAV seems pretty stable with my manual (roll +pitch) tuning & and YAW autotune numbers. Can I keep it like that or would you do something else.
thanks again for your help
Eric
Roll PID’s results:
https://drive.google.com/file/d/1x1vmnxTUFP_NeK_r_tzLbiMcuuuK1UVv/view?usp=sharing
Autotune log file:
https://drive.google.com/file/d/1eH8TF4NXPDSZ6P6p0OiLHxDUmmcOKJwq/view?usp=sharing
https://drive.google.com/file/d/1PluDHor-CERh9_IKAkzPYrAhIHeZHw_B/view?usp=sharing
Parameter:
https://drive.google.com/file/d/1zxEujwAMu5yjb6fyRggGlFbPK8C06gR3/view?usp=sharing
- No, never seen a Stabilized P that low.
- Sure, those could be good.
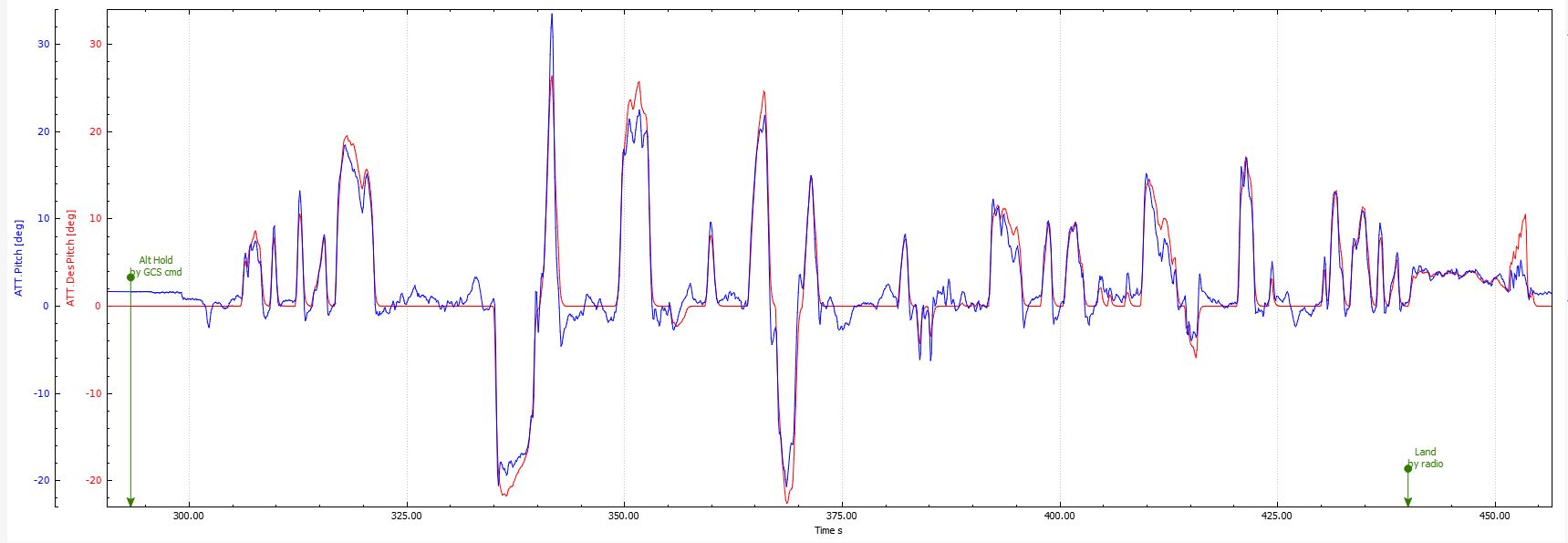
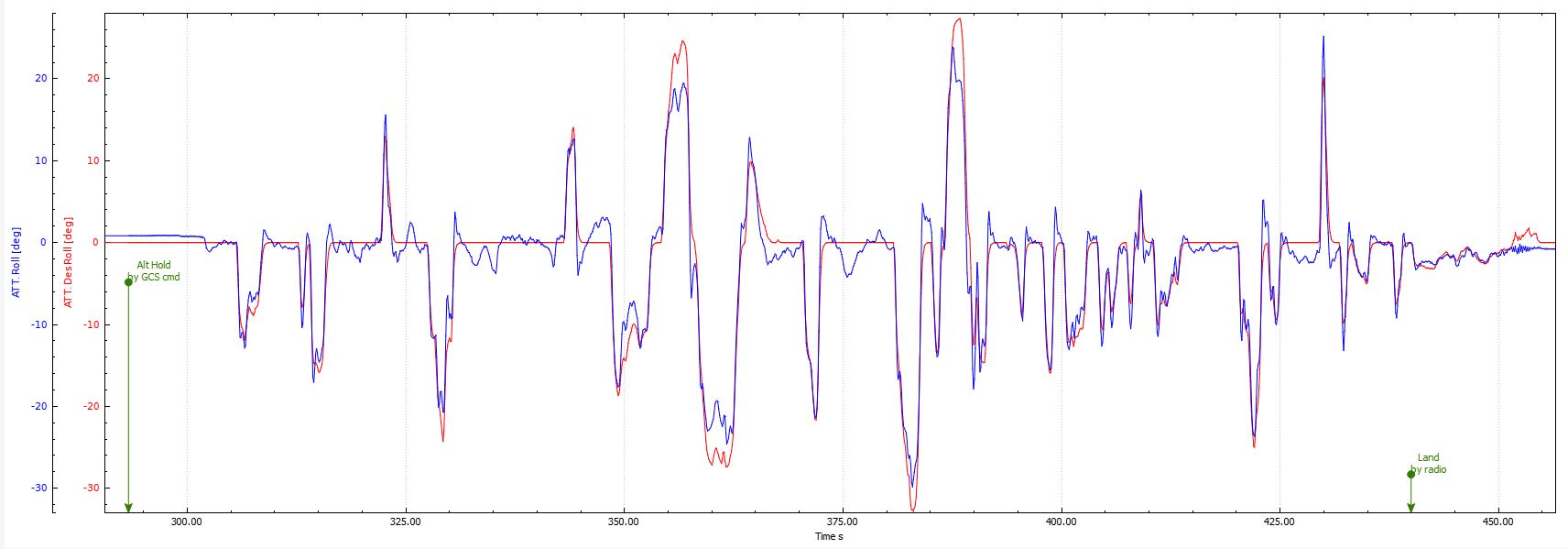
- If it’s stable then you are OK but you have to attache a log other than an Autuned log. Make another flight and give it some aggressive pitch, roll and Yaw then hover for a minute in Alt Hold and post that log.
Ok Dave I’ll do that on Wednesday, weather permitting.
thanks
Eric
Hi Dave,
I’m just reading your last post and realized that I didn’t hover for a minute in Alt Hold. But I did a flight of about 2 minutes in Alt hold with the most agressive roll and pitch that I could do with my expensive payload. I can do a 1 minutes Hover in Alt hold next week if needed.
Could you tell me how you assess the stability of the drone with this 2 minutes flight?
2minutes flight in Alt hold:
https://drive.google.com/file/d/1IaMQdvBKd7t-ieFlTCHdJ21nQFHs5cHB/view?usp=sharing
thanks again
Eric
Hi Eric-The Tune doesn’t look bad but it could likely be improved. Either with another Autotune with lower aggression or you could try manual tuning the Rate pitch/roll P term with in-flight tuning (chan 6 option). If you go the later route set the mid range value where it is now with 1/2 and 2X as the low/hi range. I’m thinking it has to lowered.
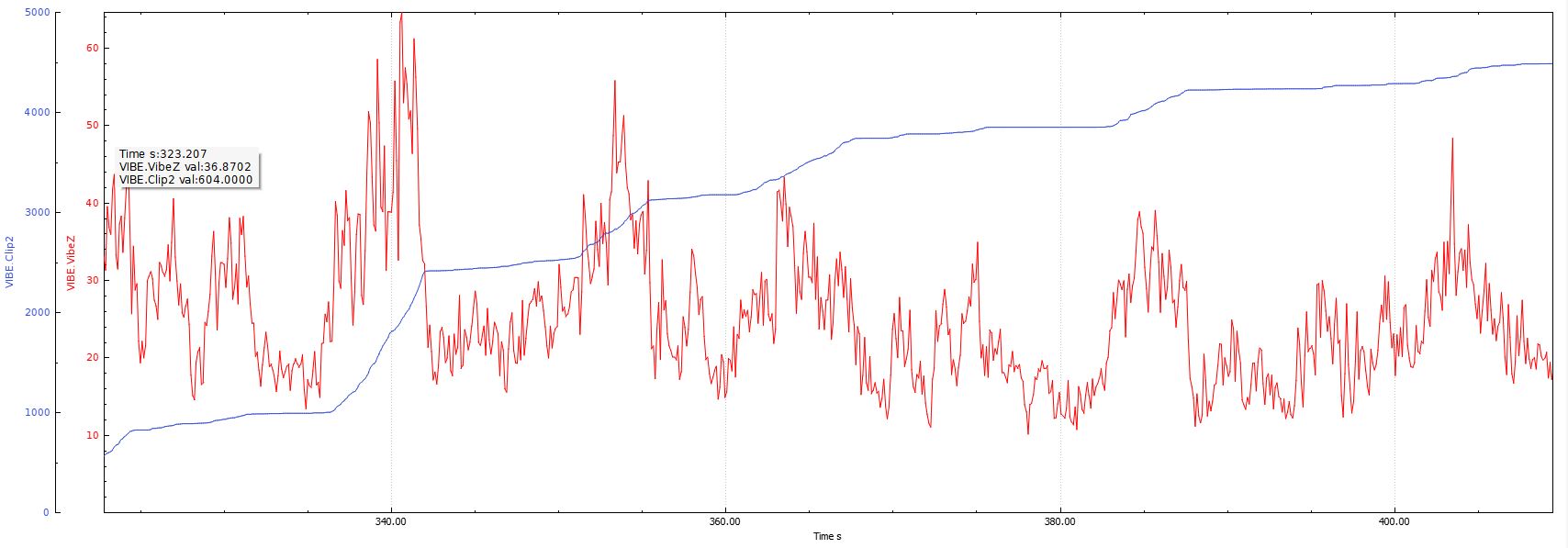
Your Z axis vibes are high with clipping events accumulating. We saw this in the Accel FFT data preveously. Other than prop balance your only other option may be the FC mounting. It’s a Cube, can I assume you followed the guidelines and hard mounted it (foam tape, etc.)?
Thanks again for the info, I will try that next week and yes the cube is hard mounted on the frame with the provided tape that came with the cube.
Could the vibration be coming from the payload that was on, it’s about 13 pounds with a V shape antenna at the bottom?
I know that’s the recommended mounting method for all Cubes but from the many reports I have seen this can be insufficient isolation on some craft. The internal IMU isolation doesn’t seem to cut it for all use cases.
Hi, I have completed the prototype hex copter did. now I am doing a test flight on Big setup hex copter. We decide manually tunning. Today the flight is good in control and flies well. But seeing logs some unhappy for me. visually I am happy. Auto mission is also done. suggest me some RATE PID for optimization of flight performance. I am including Log
Drone specifications
1.Farme size is 1900mm
2.propellers 32 and 100KV motors(brand=-motors) 12s voltage