@rickyg32
This parameter COMPASS_AUTO_ROT is not in release 4.0.3 only in dev
@rickyg32
Honestly I believe that with these kind of weirderrors and behaviors I wouldn’t take any chance.
I think you should re flash 4.0.3 again with a complete wipeout of the old params
Do all calibrations, rc accl compasses compassmot
Set sensors parameters if any
Use @xfacta Shawn’s spreadsheet for initial parameters and than hit the field.
I guess you would of course check for hardware issues like props and motor level.
Gal
COMPASS_AUTO_ROT,2 is in Rickys parameters and it’s 4.0.3, and it’s been doing its job of fighting his manual misconfiguration 
EDIT: yep I checked and it’s definitely in 4.0.3
1 Like
ok, I guess I landed on the wrong page (4.1.0)
thanks Shawn.
edit: yup, and default is set to check and fix. I would have thought to warn but i guess devs checked it. learned something new today…
Good morning Oldgazer
Sorry I tried to upload a photo but still get caught with the size message despite my reducing the image size.
Here is the original version in dropbox.

Today I have done the following.
Leveled the motors. One in fact was off slightly and has been corrected. My new jib worked a treat.
I have re calibrated the esc to dshot 300 instead of 600…
I followed the @xfacta instructions on the compass calibration and redid the calibration…Hud follows heading.
As for the props, they have been checked for balance. One was off and has been corrected.
I have flown this bird for sometime with these props with no problems. Also the documentation supports them. But we shall see if it becomes an issue.
yes this is the thing that isn’t making sense to me. It behaves as if the CCW motors are being commanded to run higher… This isn’t a motor misalignment. IF it was the quad should be trying to counter it with opposite motors. Now that said. I will likely get to the field tomorrow and video record the takeoff and spin if it still exists. I want it on tape because I could be wrong and the machine is in a CW rotation and the flight controller is hammering the CCW motors as it should…but i am pretty sure it was a CCW spin. But will get some evidence.So I am not chasing a ghost.
I also changed teh logging as Shawn suggested.
As for Compassmot @xfacta it seem my mauch sensor isn’t providing reliable voltage and current data so no compassmot just yet.
I did enable the second compass…and both calibrated fine. I am going to add some shielding to the GPS compass stack just to help out.
Ans will see what I can do to get the the mauch sensor working right.
So Current and Voltage sensor has been corrected.
! prop was not balanced. Corrected.
ESC calibration was redone.
Compass calibration redone
Motor level checked, one motor slightly off. Corrected
But now it won’t log. I have no idea why.
RG-XL Model 3 08-04-2020a.param (18.3 KB)
Also noticed this message
I still can’t get it to write a log now.
I also observed a bit of weirdness with the aft two motors. One time after a power up the machine was able to arm but the rear motors didn’t spin.
I rebooted it and it spun fine but one motor seems to start just slightly late.
I still think it’s not calibrated properly.
I thought I followed the instructions but still seems to be not right.
Update. I re calibrated at Dshot 150 and got a proper response from the esc this time. Nice beep from them at the end telling me it’s done. So will give it a try tomorrow. Will see about getting a camera pointed at it when it takes off to record any bad behavior this time out.
I was going to say use Dshot 150
Is there any messages about logging in the groundstation?
Hey Shawn.
IF you mean an error message like not logging…no
Whats odd is when I pulled the SD card to reformat it. I saw a series of bin files…so perhaps it started to log again. Will check in the morning.
So looks like the logging issue is resolved…Guess it may have just been me,
Here is todays take off…its’ clear its a CCW YAW.
The log again shows the CCW motors being driven harder
Here it is again with the RCin yaw being overlayed.
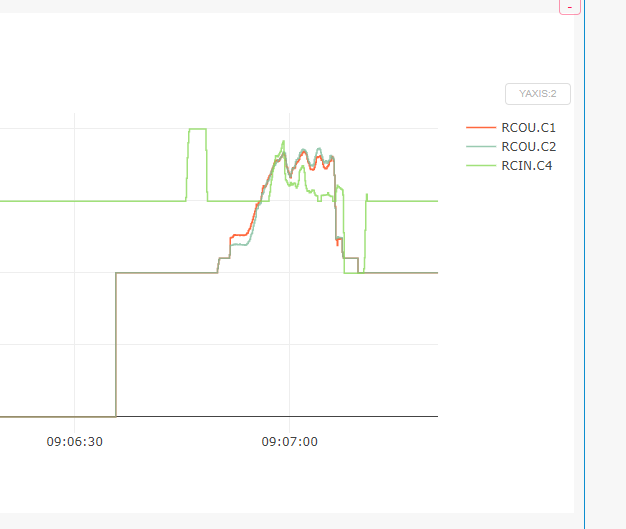
I have no clue now what to look at.
I may replace the #4 ESC since it seems to be slow on start, but apart from that I have no idea what to check for.
That log shows both compass’s recognized are internal (SPI bus, one active as selected), is that what you want?
Argh…no it should be one internal and one external…at the most.
STill that doesn’t explain the yaw. Unless the machine is for some reason commanding the yaw for reasons as yet unknown.
It looks like it is commanding the yaw (Desired Yaw) but not sure of the reason.
YA pretty odd. Going to give it a good hardware check over…see if something is odd with it. But may swap FC’s to see if it’s the flight controller with the problem.
@rickyg32, why would you want to use the internal compass at all? It might save you lot’s grief disabling the use of the internal compass.
The internal compass is too close to electronic interference and requires compassmot calibration to be effective in my opinion and often would cause “compass inconsistency errors” where having one good external compass is all you need.
(Though it got nothing to do with your current issue)
Just my 2C
Hey buddy.
I had the internal enabled only to see if the two where reporting correcting and no variance was reported. I didn’t get any so I switched it to the external GPS based Compass.
But man I have to tell yo I am stumped.
I got a suggestion to replace the FC…so I had a spare and swapped it out. I ran all the calibrations on it
Edit
Walked the dog this evening pondering what the issue is with this quad when suddenly something struck me. The FC is pegging the CCW motors…but CCW motors cause CW torgue…Damn I am forgetting the physics. So if the CCW motors are trying to turn the craft CW…and the machine is spinning CCW…the @OldGazer may be right about some mechanical issue…I just can’t’ see it.
But with this in mind I will do some testing tomorrow.
1 Like
I cant remeber the logs contentsnow, but did you have the ESC telemetry enabled? Try disabling that. Also try disabling logging, just as tests.
Hi,
I had a similar but much worse behavior when I once had swapped CW and CCW motors and propellers.
Could it be that the fc think front is facing backwards?
Have you tried to run motor by motor to verify that fc correctly know which motor is which?
Do a motor test, lower the thrust percent in the motor test until motor does not start spinning.
It must be the same for all motors, if not check the calibration or the ESC itself on that motor
Shawn @xfacta
I am not using ESC telemetry nor do I have it connected to the flight controller. The outputs are consolidated on the off chance a spare telem port comes free and I can use it…but as of today that’s not the case.
@Patrik_Emilsson
The FC knows its facing forward. I get proper hud display activity when I tilt the craft.
Not sure I understand what you mean by swapping motors and props.
I have done a motor test and each motors runs both in it’s proper rotation and order…
So no issues there.
@Eosbandi been a while…nice to hear from you.
I did a motor test but that I am afraid accomplished nothing. The motors start spinning at 1% throttle…go figure.
For the ESC calibration here is the report from BLheli.
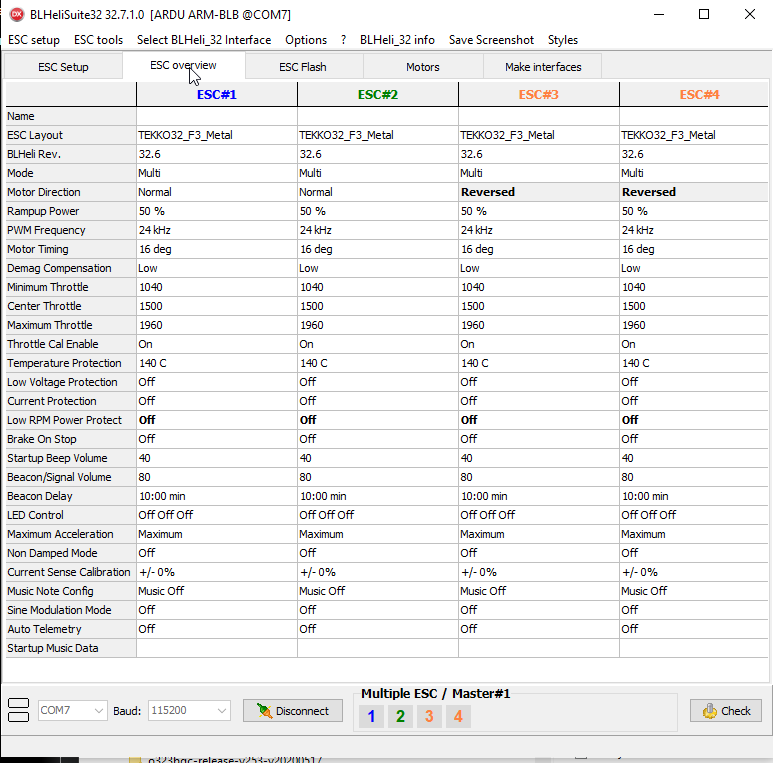
I don’t see anything unusual there.
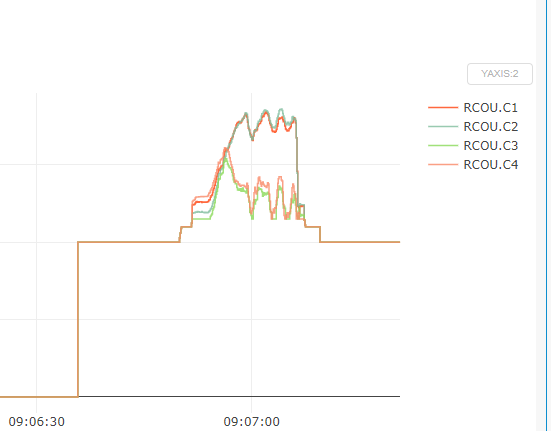
Here is a graph from the machine this morning.
To put it in context the machine is on a concrete floor.
Its armed and the throttle is raised to about 50% stick. I then leave it for a time…I then raise the throttle to 60% or so and again leave the sticks alone till I disarm it.
Check out the odd RCou
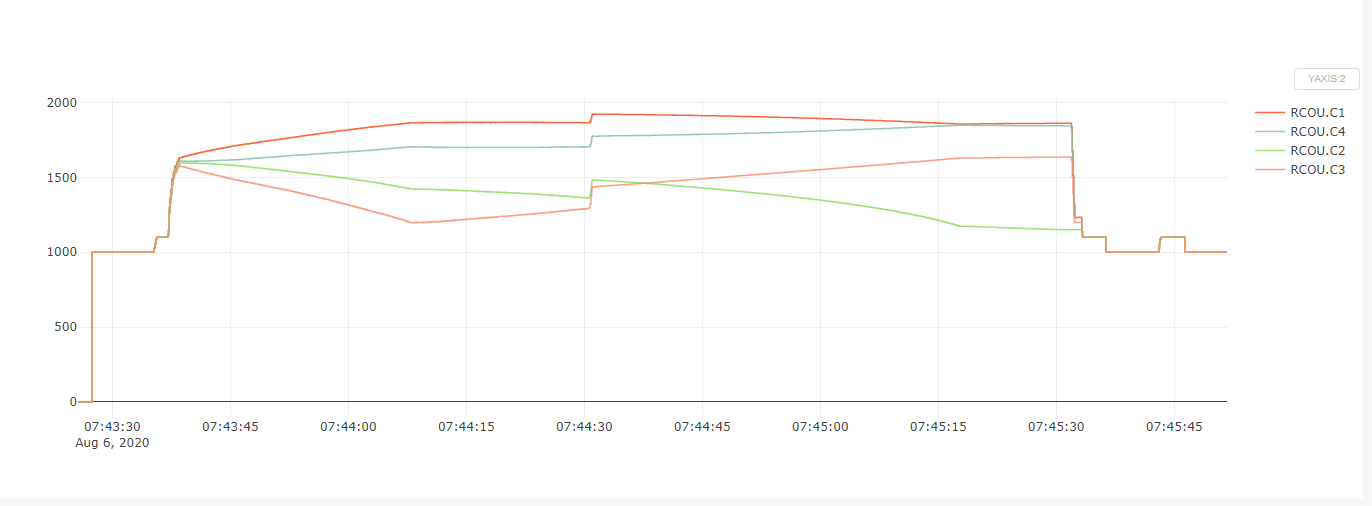
This is now a second FC on 4.0.2
It appears that the machine isn’t trying to yaw…at least not while its fixed to the group…so I will check the build for anything abnormal…however it is also clear that the RCou seems wrong in that all the motors should be the same. No throttle change and not moving so no need to compensate for any changes…ergo…flat line at the same output for each motor…this isn’t the case.
I’m stumped. I am looking at it so much now I am not sure if this is even normal and I can’t tell…
I can’t attach the bin file because its to large.
argh