Actually another data point that could be useful for analysis:
github.com/diydrones/ardupilot/issues/3032
AP 3.4: RTL and CRUISE both give occasional oscillations and stalls of death
marc.merlins.org/tmp/MANU_to_GUIDED_4.BIN
youtube.com/watch?v=UnuNdcZ … be&t=18m5s
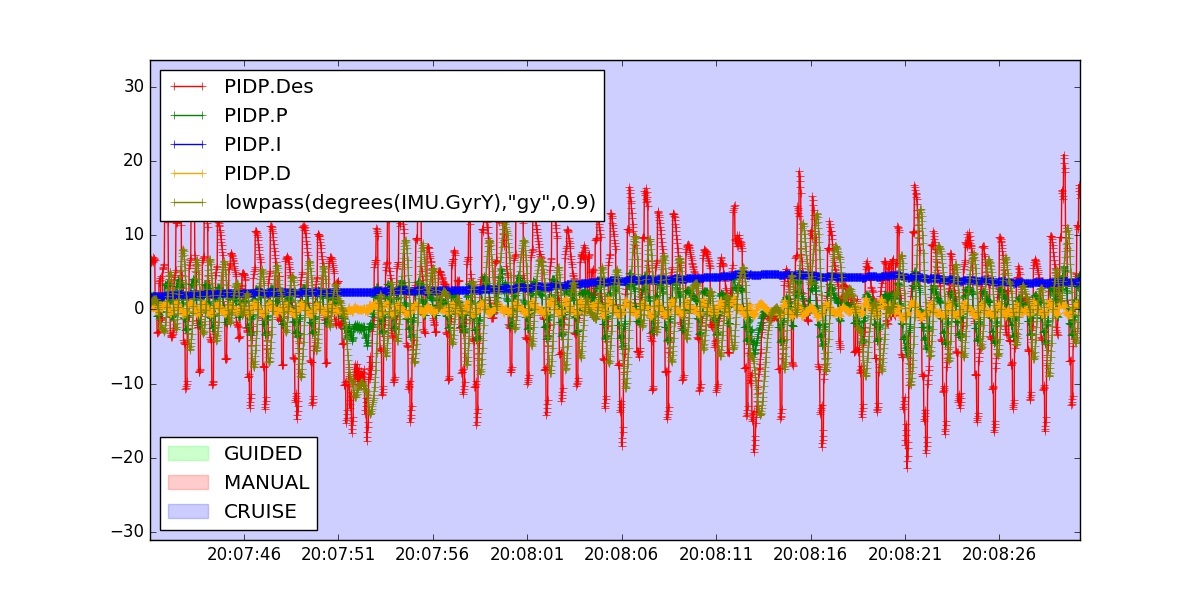
Looking at it again, I don’t think it’s a pitch up due to throttle because not much throttle was applied, and I don’t think RTL motor power up would have caused what was a perfectly flying plane above RTL target altitude to start flying so badly, but since we’re talking about control loop issues, this may still be worth looking into, to see if it’s related.
Airframe is a BFG 2600 which a T tail aircraft. Elevator has always had plenty of authority in all flight conditions as far as I can tell