The content of this post was edited after some more experiments:
Hi,
I am still new to the ardupilot system… We have had some very nice flights in acro and stabilize without GPS. Today, I tested GPS for the first time, and the result is “catastrophic”. I attached some screenshots from the log browser. The corresponding log file is here.
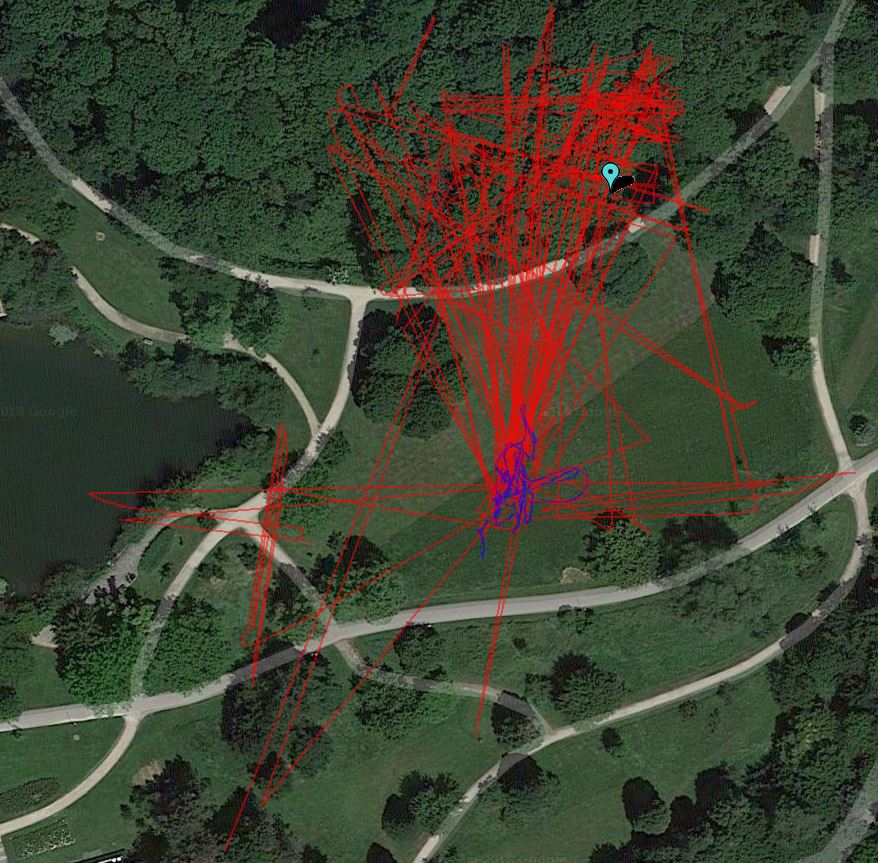
The GPS glitches permanently while the copter is standing on the ground and also while flying. It’s like 1 glitch per second or so. First I had to mount the Here+ v2 GPS on a 1m long rod on top of the copter. I am using a USB 3.0 cable as extension, RxD/TxD, SCL/SDA are on the SDP / UTP cable pairs. I have heard different stories about cables that are this long. Some people warn about the crosstalk between SDA/SCL, but others use similarly long cables without problems. However, after I had all these glitches, I thought the reason is the cable length. So I cut the cable to about 30 cm and tried again. But the GPS still glitches like crazy (see a screen capture of the mission planner here)
I attached some log-screenshots of a testflight, and also the log itself. Any help or hint would be greatly appreciated…!
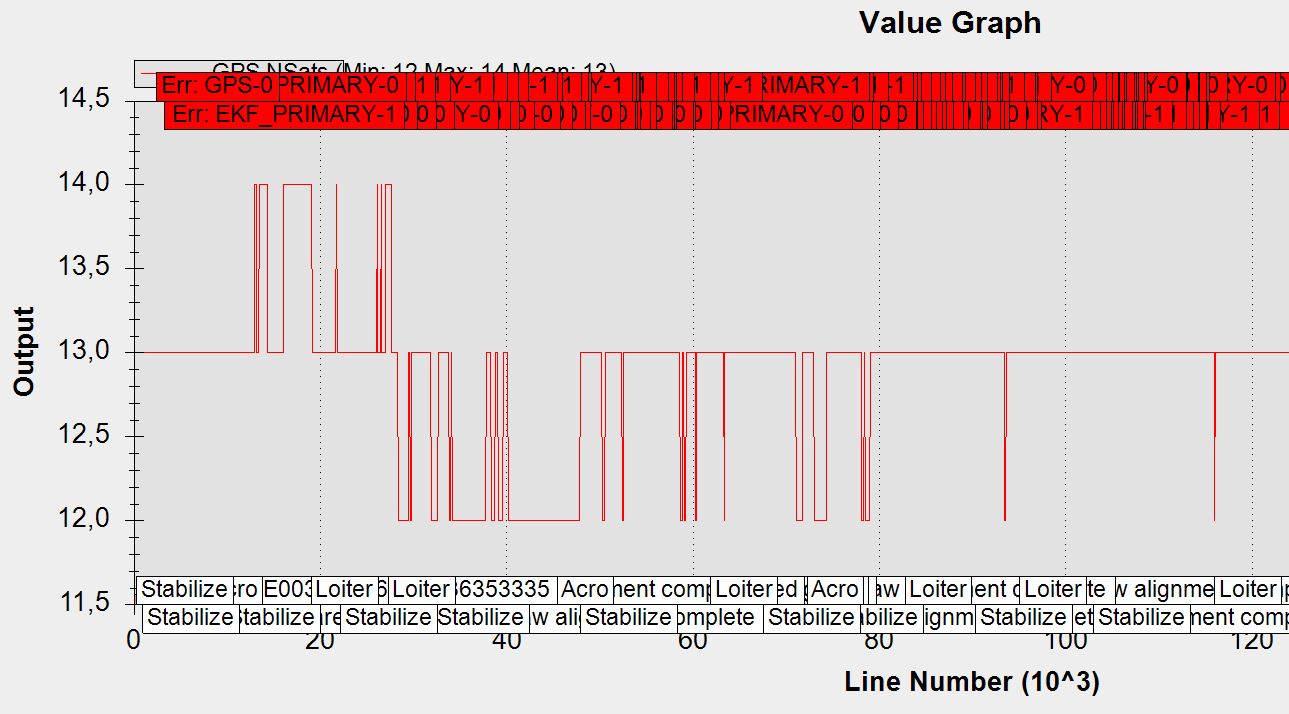
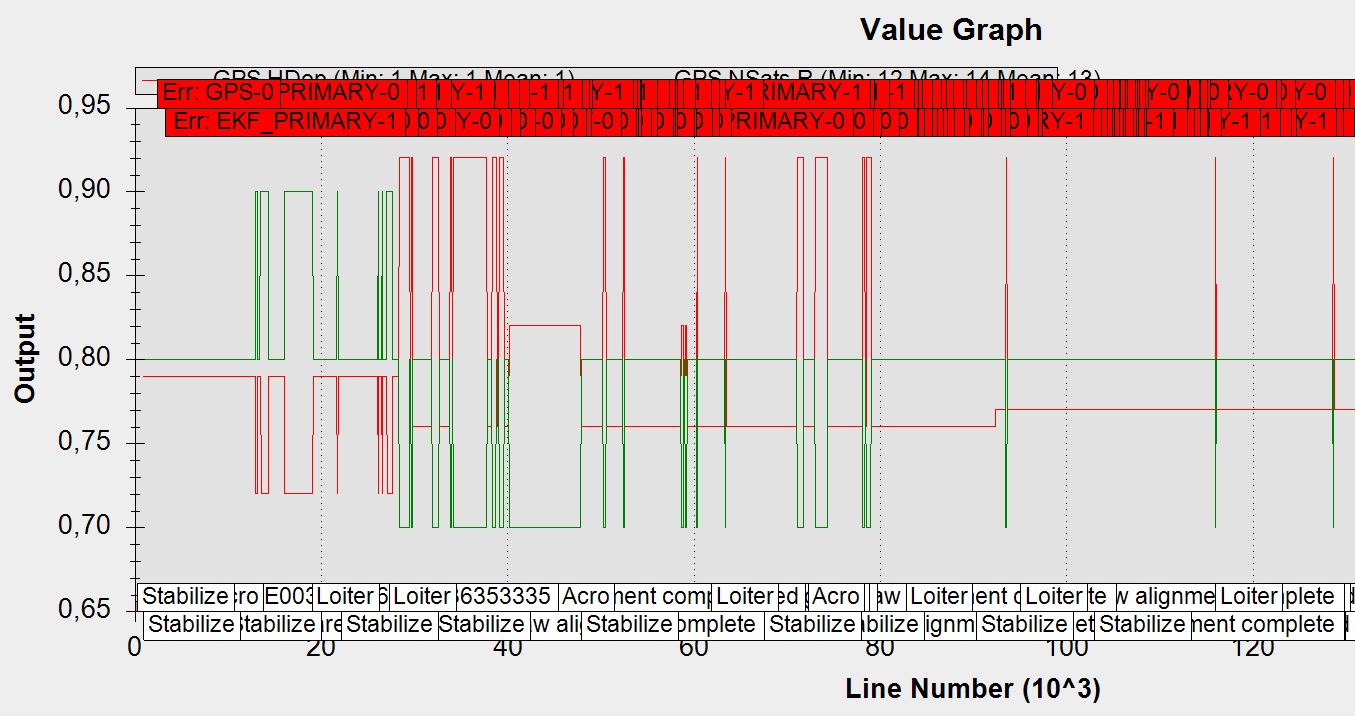
Log-Browser-NSats
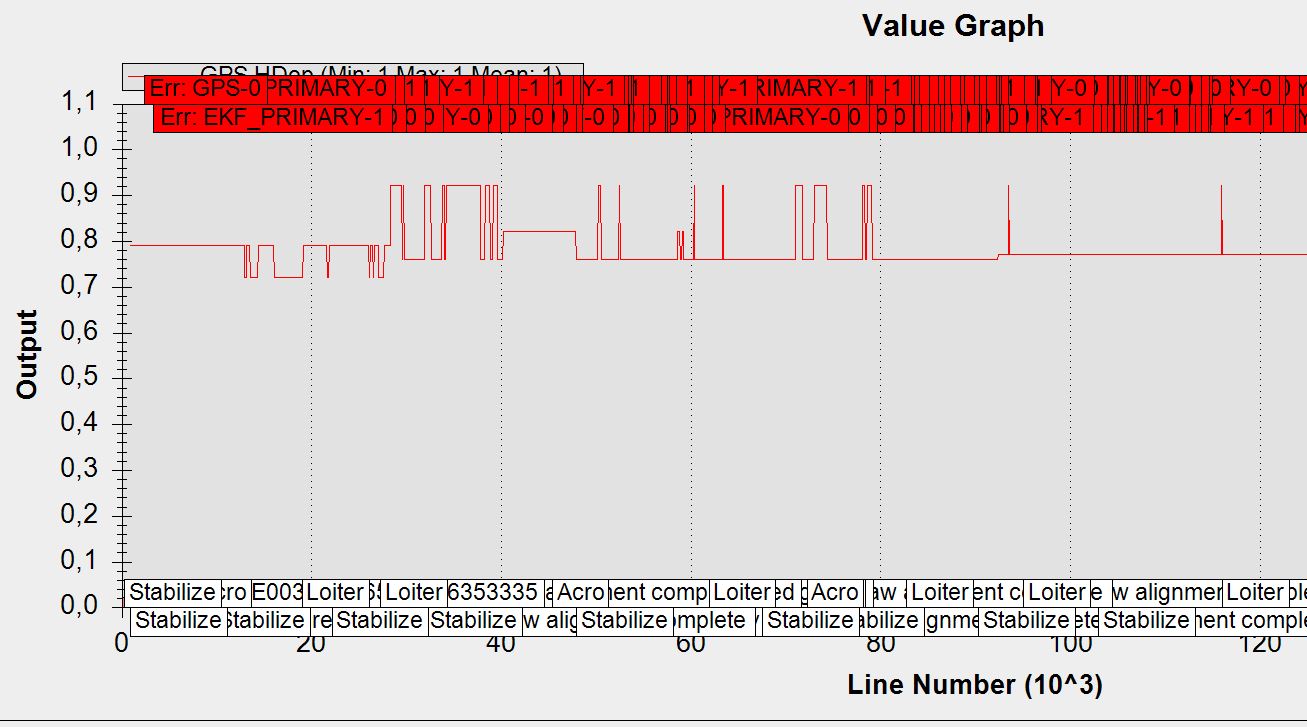
Log-Browser-HDOP
Log-Browser-GPS-Glitch
Log-Browser-Lat
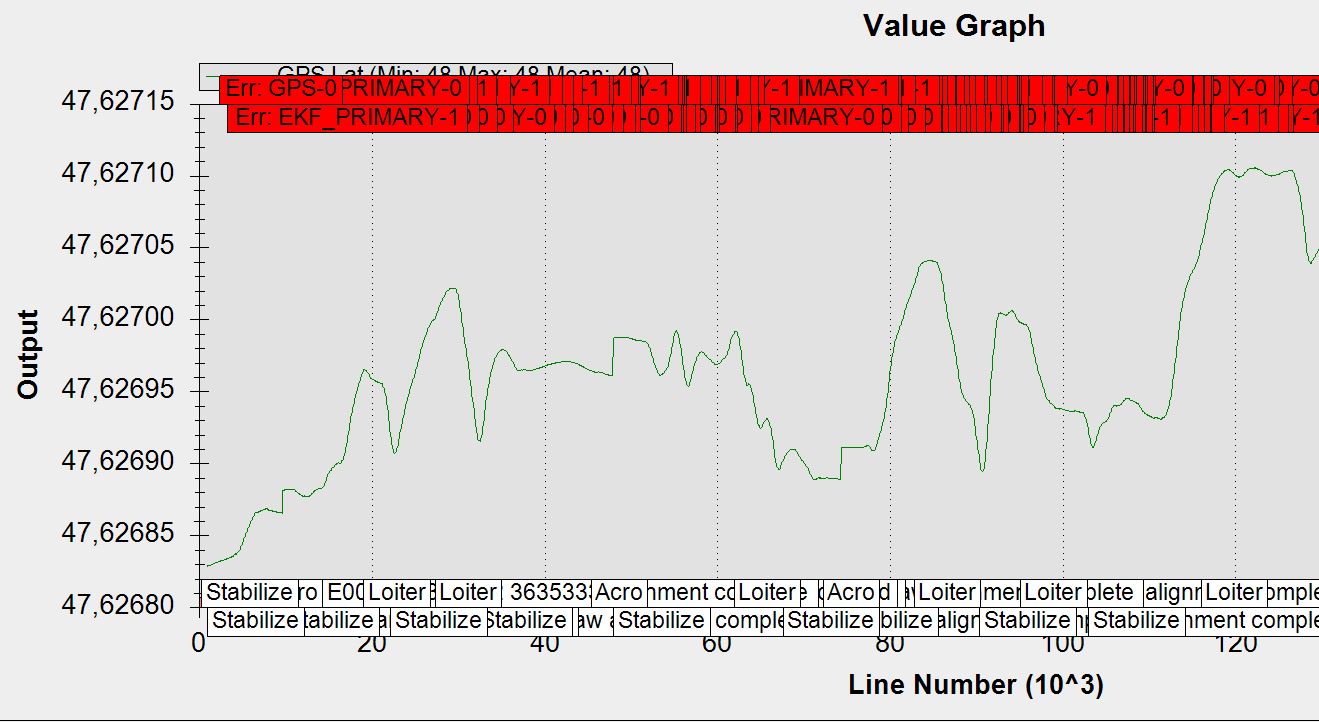
Log-Browser-Errors

GPS-Position