The quad was flying well on 4.4.4, (except for the CRSF fail safes). The final throws of winter kept me from testing 4.5.0 or any of the betas so I jumped straight to 4.5.1.
I took off in Alt-Hold and no issues. I switched to Loiter and almost immediately it began to oscillate. Pitch seems to be the culprit.
I compared the parameters to the last flight on 4.4.4 and the only differences I saw were:
ATC_RAT_YAW_FLTD,20 # on 4.4.4 was: 0
INS_HNTCH_BW,35 # on 4.4.4 was:20
INS_HNTCH_HMNCS,3 # on 4.4.4 was:11
I made the changes to the notch filter, but I don’t think I made the change to the YAW_FILTD. I reset the those parameters back to their 4.4.4 values and it seemed to help, but I’m not totally pleased as there still seems to be some really mild oscillations after hard braking in Loiter mode. Alt Hold seems okay.
What is going on that that would cause an oscillation in Loiter? Was there something in the upgrade from 4.4.4 to 4.5.1 that would trigger ATC_RAT_YAW_FLTD to change.
Quad is a EDU-450. Cube Orange. ESCs are BLHeli32, running bdshot. 4S. 10" blades. Rotorgeeks 2812 900KV motors.
Any suggestions are welcome! Thanks!
PS: The CRSF issues seem to have gone away on this one in 4.5.1, and that’s good because this quad was giving me a ton of failsafes on 4.4.4.
Yes, you’re right, in 4.5 we’ve changed the default ATC_RAT_YAW_FLTD value to 20 (see PR here). This change is from @andyp1per but I think the consensus from the tuning experts on the team is that this should be a good change. I’m not a tuning expert actually but I think that yaw control is generally quite weak on multicopters and 20hz is high enough that it should be fine. It’s unlikely to be the cause of a change in Loiter braking behaviour.
The angle control in the log looks very good. The PSC log messages are missing so it’ more difficult to check Loiter’s performance. I think I’ll leave it to the tuning expert to weigh in further.
Its possible the increased filtering is causing some phase delay which can lead to control oscillations. Its worth trying setting the parameters back to what they were and see if it makes any difference.
Thanks! I’m going to reset the YAW_FILTD to 0. I’ve also dropped off one of the notch filter harmonics to make a minor improvement in phase delay and to reduce CPU load.
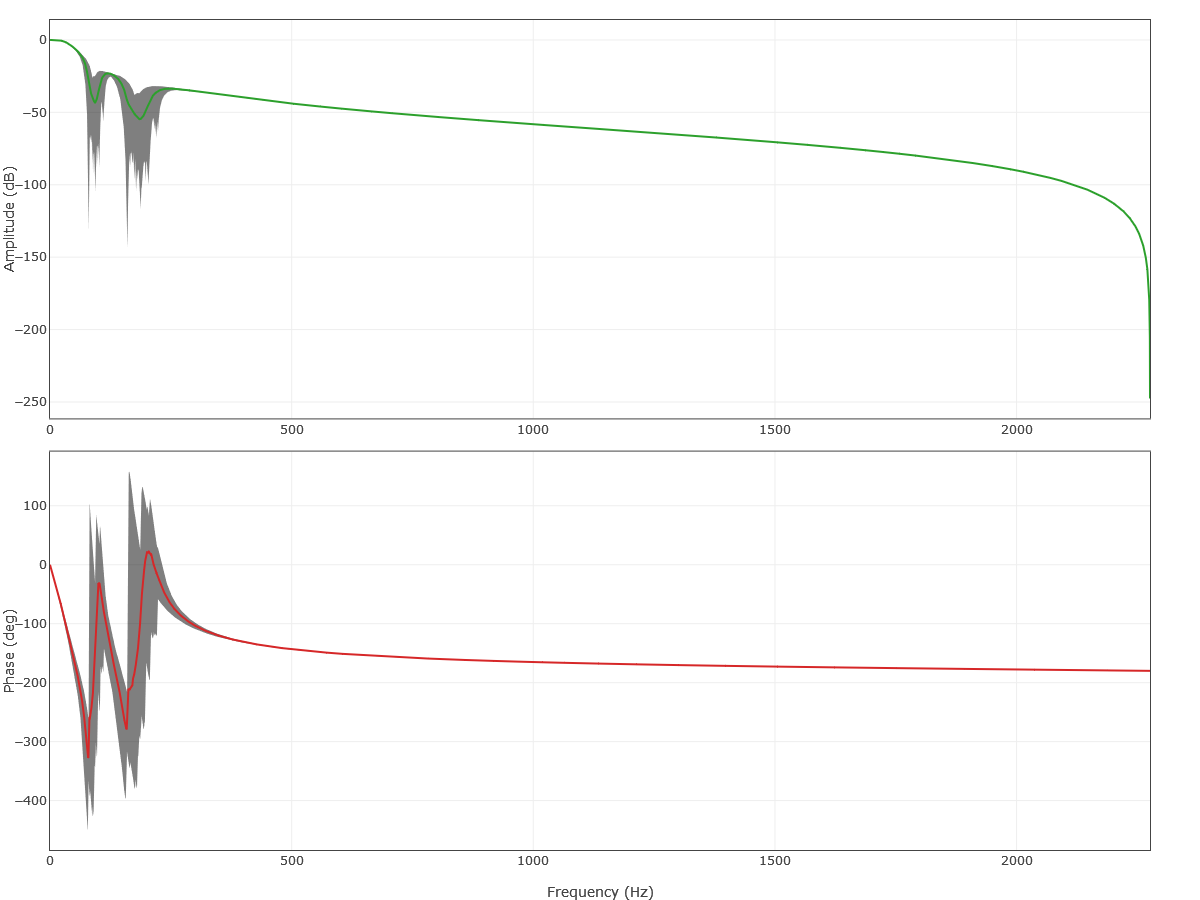
When looking at phase delay I know ideally you want it to be minimal, but is there some ideal level? Can it be simplified to say something like “better than -300 degrees” or “amplitudes better than -50”:?
Its all a trade-off - its quite possible to tune a copter with a lot of phase delay, but obviously the reaction time will be reduced. There is no good value - because the filters are there for a reason - to reduce noise - if you noise is too high then more phase delay might be acceptable to order to get the control that you want
Thanks for the help! I’ve reset YAW_FILTD to 0, and thing seem to be good. Also re-ran auto tune since the conditions today were ideal and that also made a minor improvement. (it was already close because autotune only took about 3 minutes total for all 3 axis). So I’ll call this one closed for now.